Изобретение относится к измерительной технике и может быть использовано в робототехнических системах и комплексах для автоматизированного измерения перемещения и скорости.
Цель изобретения - расширение функциональных возможностей путем обеспечения возможности одновременного измерения перемещения и скорости.
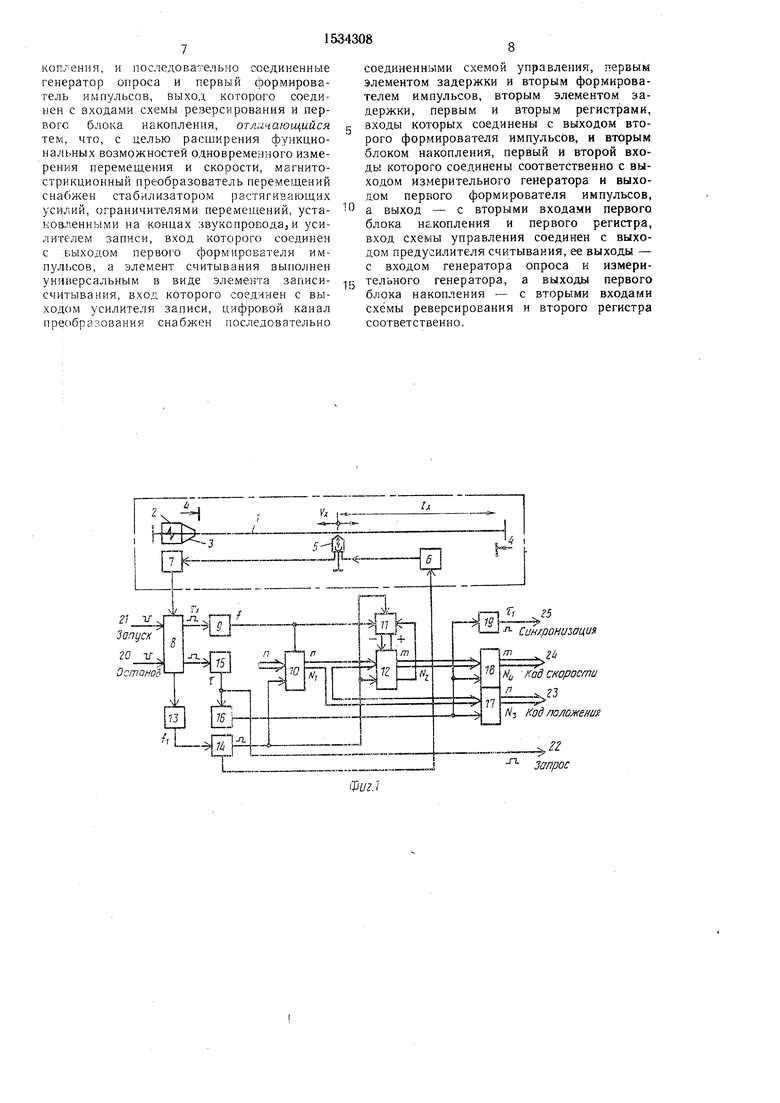
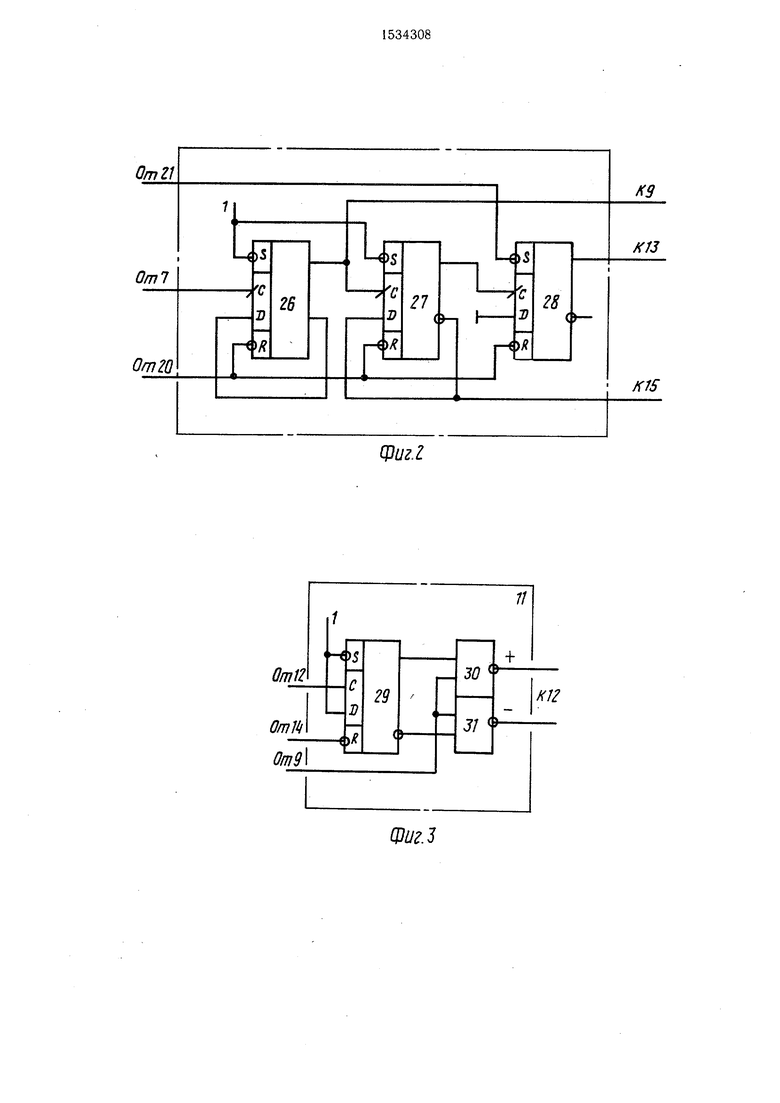
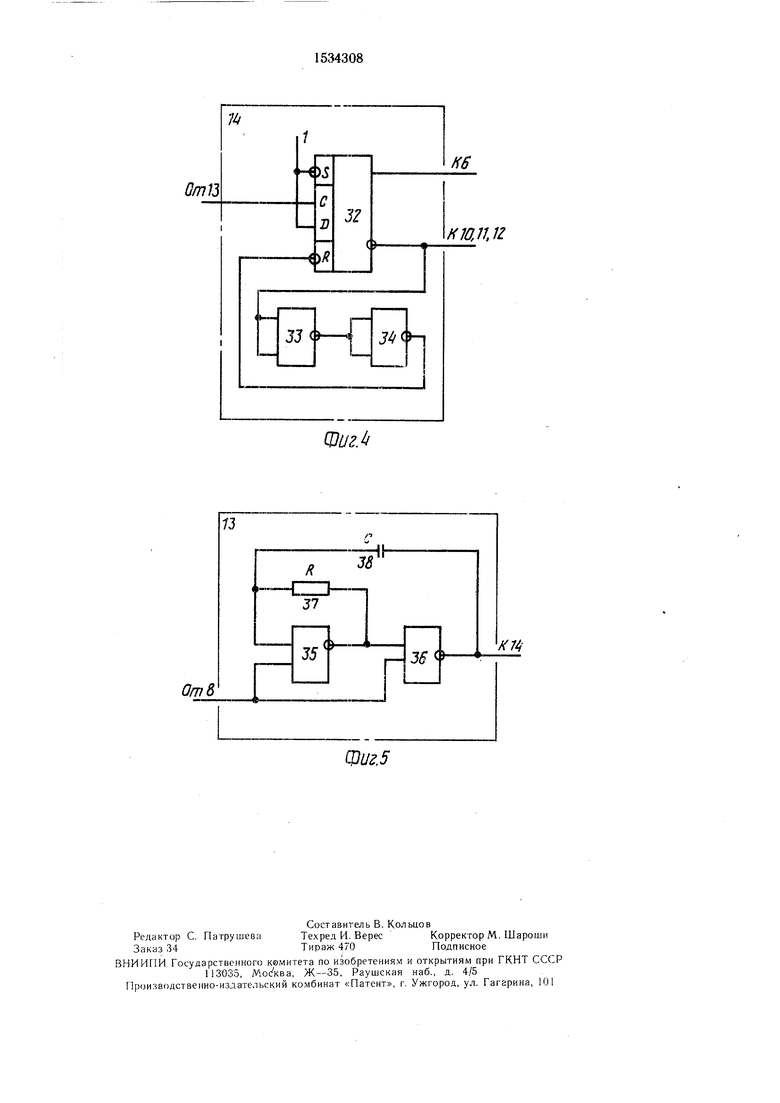
На фиг. 1 приведена блок-схема измерителя параметров движения; на фиг. 2, 3, 4, 5 - варианты выполнения его основных узлов.
Измеритель линейных перемещений содержит магнитострикционный преобразователь линейных перемещений, состоящий из звукопровода 1 из магнитострикционного материала со свободным концом, стабилизатора 2 растягивающих усилий, акустического демпфера 3, двух ограничителей 4 перемещений, элемента 5 записи-считывания, усилитель 6 записи и предусилитель 7 считывания, цифровой канал преобразования,
состоящий из схемы 8 управления, измерительного генератора 9, блока 10 накопления, схемы 11 реверсирования, блока 12 накопления, генератора 13 опроса, формирователя 14 импульсов, первого элемента 15 задержки, формирователя 16 импульсов, регистров 17 и 18, элемента 19 задержки, шины 20 управления, шины 21 запуска, шины 22 запроса, шин 23 и 24 результата по положению и по скорости, шины 25 синхронизации, один конец звукопровода 1 установлен в акустический демпфер 3 и подключен к стабилизатору 2 растягивающих усилий, соосно со звуко- проводом 1 закреплен элемент 5 записи- считывания с возможностью продольного перемещения между ограничителями 4 перемещений, имеющий кинематическое соединение с объектом контролируемого перемещения, выход элемента 5 записи-считывания подключен к третьему вход схемы 8 управления через предусилитель 7 считывания, ее первый выход через ичмеСП
со
4
сс
о
00
jjim ii aim icnepaiop 9 подключен к пря- мом счетному входу блока 10 накопле ния и вчсиу синхронизации схемы 11 реверсирования, ее выходы соединены с прямым и инверсным счетными входами блока 12 накопи ния ею выход переноса соединен с информационным входом схемы 11 реверсирования а ее нулевой вход соединен с синхровходами блоков 10 и 12 накоп 1ения и по I1 оединен к одному выходу фор мирователя 14 импульсов его выход 1от,к1ючен к Bxoiy элемента 5 записи считывания чсpei си 1итель 6 записи, вход формирователя 14 ИМПУЛЬСОВ подсоединен к трегьем BI.IXOIV схемы 8 управления чере iоператор 13 опроса, ее второй вы хо i через к мент 15 задержки подключен к тине 22 запроса и соединен с входом формиров т 1Я Ь импульсов, его выход (.oi UMRH с синхровхоаами регистров 17 и 18
И ПО J.K 1ЮЧСН
41 ре з t ц мент 1 0 накоп книи ными вхо ыми iисipa 17 и о ре л
24
тага
к тине 25 синхронизации 19 за 1ержки выходы блока юепшены с информацион б тка 12 накопления и ре выхоты подключены к шине по скорости через регистр 18 первый и вюрои входы схемы 8 управ книч по LK Ш)че ны i.оответственно к шине 21 запчска и к шине 20 вправления
с i рои, гво работает с 1еду ющим образом
Первонач пьно стройство станавли вас к я в , uioe состояние По шине 22 запрос) вькгавтен цифровой сигнал «Зап рос в ответ на который по шине 21 запчсн i no UK icH цифровой имп льеныи сиг на i Производится запуск схемы 8 ирав1ения цифрового канала преобразова ния eipomnsa сети по шине 20 управте ния не выстав )ен цифровой сита.71 «Ос ianoB (фи 2) На ее третьем выходе формир ет.я с этого момента ешнап по когоромх ирои (водится запуск генератора 13 опроса (фиг 5) вырабатывающий импульс ные uii наш опроса с частотой стедова ния I -1 Г| i тл Тппериод опроса
ма никк ipHKHHOHiioi о преобразователя пе )i метении
По псрвом HMHV 1ьс генератора 13 он poi i зиткаегся формирователь 14 им н |ыов (фш 4) по сигналам которого iipoiHB( 1ИГ1.И запись нача 1ьною кода (N„-0 001 но и информационным входам в б шк 10 накоп ения, и возбуждение uiinreiH h записи Mai нитострикционного i pi обра зоватс тя шнейных перемещений
и пфованныи токовый имп ibc сили u ui записи проходит на вхо i иниктив ною -jitMtma т ыние и считывания ста повинною iooi.no i. ш копроводом 1 и вы по минною с возможностью перемещения и во) по i ним мо 1 тированн ю MI нин)нр ю BOIH ве ie HI вне прямого м ii нчюс грикционною преобразования Эта MI та paciipi с фаняетеи в обе стороны i в коарово i м ч ниюстрикционного пре
0
0
5
образователя линейных перемещений с конечной фазовой скоростью V Одновременно на выходе элемента 5 записи-считывания формируется модулированный импульс напряжения, который проходит без задержки на вход предусилителя 7 считывания и по которому производится запуск измерительного генератора 9 через схему 8 управления Генератор 9 вырабатывает опорные счетные импульсы частоты {, которые проходят на прямой счетный вход блока 10 накопления
Распространяясь в сторону составного акустического демпфера 3, магнитоупругая волна в некоторый момент времени дос- 5 тигает акустический демпфер и испытывает полное акустическое поглощение, исключая тем самым образование в магнитострик- ционном тракте передачи вторичных от раженных магнитоупругих волн
Распространяясь в противополбжную сторону, магнитоупругая волна в искомый момент времени достигает зоны отражения свободного конца звукопровода, испыты вает практически полное отражение и распространяется в обратную сторону в направлении элемента 5 записи считывания, распо юженного на искомом расстоянии „, от свободного конца звукопровода, J,OCTHIH B темента 5 записи считывания, магнитоупругая волна наводит на его вы- хот.е мод пцрованный импульс напряжения о считывания вследствие магнитоупругого преобразования, который проходит в предуси- литель 7 считывания
Распространяясь далее по звукопроводу 1, магнитоупругая волна, минуя элемент 5 записи считывания, достигает акустический 1е 1пфер } и испытывает по жое акусти ческое попощение
Импутьс предусилителя 7 считывания проходит на информационный вход схемы 8 правления цифровою канала преобразова ния устройства и останавливает работу измерительного генератора 9 Счетные им п 1ьсы опорной частоты f с этого мо мента не поступают на прямой счетный вхо т, блока 10 накопления Прохождение тих импу ьсов на счетные входы блока ; накоппения через схему 11 реверсиро вания в первом такте преобразования не несет информации В результат в первом такте преобразования линейного переме тения на h - разрядном выходе блока 10 накоп 1ения формируется цифровой код положения, равный
У
Затем енератор 13 опроса вырабатывает второй импульсный сигнал опроса При этом возбуждается формирователь 14 импульсов, по сигналам которого производится запись сформированного на выходах первого б ока 10 накоп 1ения кота (1) в блок 12
5
0
Ь и
0
N.Tx,
(1)
5
накопления и установка схемы 11 реверсирования (фиг 3) в режим инверсного счета, при котором счетные импульсы измерительного генератора 9 проходят на инверсный счетный вход блока 12 накопления.
Одновременно запускаете усилитель б записи магнитострикционного преюбразова- теля линейных перемещений, по сигналу которого производится запуск измериперемещекия объекта записываются в выходные буферные регистры
.юл; N4----N -.,(6)
где хранятся до следующего цикла преоб- 5 разования. По греты-м у выходу схемы 8 управления снимается разрешающий работу генератора 13 опроса сигнал, работа генератора блокируется.
В следующий момент времени по шине 23 результата по положению, шине 24 результельного генератора 9 через предусилитель 7 Ю тата по скорости и шине 25 синхронисчитывания и схему 8 управления и возбуждается магнитоупругая волна в звуко- проводе 1. Отклик магнитоупругой волны считывается перемещающимся элементом 5 записи-считывания через искомое время
15
зации выставляются следующие сигналы: «Код положения, «Код скорости и «Син- хронизация ;. По шине 22 запроса выставляется сигнал «Запрос.
На этом полный цикл преобразования перемещения в код заканчивается, и следующий цикл выполняется без изменений при подаче сигнала «Запуск по шине 2 запуска. Работа устройства может быть принудительно блокирована при выставлении по
т 2
(2)
На этом полный цикл преобразования перемещения в код заканчивается, и следующий цикл выполняется без изменений при подаче сигнала «Запуск по шине 2 запуска. Работа устройства может быть принудительно блокирована при выставлении по
мируют код текущего положения контро лируемого объекта
Nx,,o. f - f
(3)
через которое останавливается измерительный генератор 9. За этот период Т.г его
счетные импульсы проходят на прямой 20 шине 20 управления цифрового сигнала счетный вход блока 10 накопления и фор- «Останов.
Точность измерения устройства определяется частотой f дискретизации временного интервала Т перемещения, а помехо- 25 устойчивость обеспечивается за счет использования модуляции зондирующего маг- Счетные импульсы измерительного генератора 9 одновременно проходят через схему 11 реверсирования на инверсный счетный вход блока 12 накопления, производя вычитание текущего кода из кода NX , сформированного в первом такте преобразования перемещения. Если значения кодов окажутся NX 2, то на выходе переноса блока 12 накопления формируетнитоупругого сигнала, стабилизации волнового сопротивления магнигострикционного тракта передачи сигналов за счет стабилизации его механического напряжения, а 30 также его изоляции от воздействия внешней среды. Ограничители 4 перемещений задают требуемый диапазон перемещения элемента записи-считывания вдоль звукопро- вода и предохраняют от механического разрушения элементы конструкции преобра
по которому схема II реверсирования 35 зователя при работе, переключается з режим прямого счета,Таким образом,использование в усгройтпри котором счетные импульсы измери-ве процессора для вычисления параметров
тельного генератора 9 проходят на прямой движения объекта, выполненного по схеме
цифрового автомата с «жесткой логикой, 4Q обеспечивает расширение его функциональных возможностей относительно области технического применения. При этом дос- дигается максимально возможное быстродействие процесса вычисления параметров движения контролируемого объекта
Формула изобретения Ультразвуковой измеритель параметров движения, содержащий магнитострикцион- ный преобразователь линейных перемещений включающий звукопровод с акустическим демпфером на конце, элемент считывания, выполненный с возможностью перемещения вдоль звукопровода и предназначенный для подсоединения к контролируемому объекту перемещения, и предусилитель считывания, вход которого соединен с выходом
цесса в схемах 10 и 12. Через это 55 элемента считывания, и цифровой канал время запускается формирователь 16 им-преобразования, включающий последовательно соединенные измерительный генератор, схему реверсирования и первый блок нася сигнал переполнения разрядной сетки,
счетный вход блока 12 накопления, формируя разность указанных кодов
NxcK |N2-Nit,(4)
кбторая несет информацию о текущей скорости перемещения контролируемого объекта
-4L „ Hi -Ilii ТоT; (5)
В результате в конце второго такта преобразования перемещения на п-разряд- ном выходе блока 10 накопления формируется код (3) положения контролируемого объекта, а на п-разрядном выходе блока 12 накопления - код скорости объекта.
По второму выходу схемы 8 управления (фиг. 2) формируется сигнал, который задерживается на время переходного проV,
45
50
пульсов, по сигналу которого сформированные коды положения (3) и скорости (4)
перемещекия объекта записываются в выходные буферные регистры
.юл; N4----N -.,(6)
где хранятся до следующего цикла преоб- разования. По греты-м у выходу схемы 8 управления снимается разрешающий работу генератора 13 опроса сигнал, работа генератора блокируется.
В следующий момент времени по шине 23 результата по положению, шине 24 результата по скорости и шине 25 синхрони
зации выставляются следующие сигналы: «Код положения, «Код скорости и «Син- хронизация ;. По шине 22 запроса выставляется сигнал «Запрос.
На этом полный цикл преобразования перемещения в код заканчивается, и следующий цикл выполняется без изменений при подаче сигнала «Запуск по шине 2 запуска. Работа устройства может быть принудительно блокирована при выставлении по
шине 20 управления цифрового сигнала «Останов.
кипения, и чослс юватльно соединенные генератор опроса и первый формирова- it- ii, ,льсов, выход которого соединен с входами схемы реверсирования и пер- iHJi.i блока накопления, отличающийся тем, что. с целью расширения функциональных возможностей одновременного измерения перемещения и скорости, магнито- счрикционный преобразователь перемещений снабжен стабилизатором растягивающих силий, ограничителями перемещений, уста- нов ICHHUMH на концах вукопровода, и уси- iif кием записи, вход которого соединен с выходом первою формирователя им тльсов, а элемент считывания выполнен универсальным в виде элемента записи- считывания, вход которого соединен с выходом силителя записи, цифровой канал 1ван1-.я снабжен последовательно
соединенными схемой управления, первым элементом задержки и вторым формирователем импульсов, вторым элементом задержки, первым и вторым регистрами,
входы которых соединены с выходом второго формирователя импульсов, и вторым блоком накопления, первый и второй входы которого соединены соответственно с выходом измерительного генератора и выходом первого формирователя импульсов, а выход - с вторыми входами первого блока накопления и первого регистра, вход схемы управления соединен с выходом предусилителя считывания, ее выходы - с входом генератора опроса и измерительного генератора, а выходы первого блока накопления - с вторыми входами схемы реверсирования и второго регистра соответственно
| название | год | авторы | номер документа |
|---|---|---|---|
| Ультразвуковой измеритель перемещений | 1989 |
|
SU1620834A1 |
| Ультразвуковой измеритель линейных перемещений | 1989 |
|
SU1645812A1 |
| Устройство для измерения перемещений | 1990 |
|
SU1758429A1 |
| Измерительный преобразователь линейных перемещений | 1988 |
|
SU1552002A1 |
| УЛЬТРАЗВУКОВОЙ ПРЕОБРАЗОВАТЕЛЬ ЛИНЕЙНЫХ ПЕРЕМЕЩЕНИЙ ОБЪЕКТА | 1991 |
|
RU2031360C1 |
| УЛЬТРАЗВУКОВОЙ ПРЕОБРАЗОВАТЕЛЬ ПЕРЕМЕЩЕНИЙ | 1991 |
|
RU2035692C1 |
| Ультразвуковой измеритель перемещений | 1989 |
|
SU1619027A1 |
| Устройство для измерения линейных перемещений | 1987 |
|
SU1515041A1 |
| УЛЬТРАЗВУКОВОЙ НАКЛОНОМЕР | 1991 |
|
RU1811265C |
| Измерительный преобразователь линейных перемещений | 1988 |
|
SU1589051A1 |
Изобретение относится к измерительной технике и может быть использовано в робототехнических системах и комплексах для автоматизированного измерения перемещения и скорости. Целью изобретения является расширение функциональных возможностей путем обеспечения возможности одновременного измерения перемещения и скорости. Для измерения перемещения формируется временной интервал, длительность которого зависит от величины перемещения. Скорость перемещения определяется как разность результатов измерения перемещения в соседних тактах измерения. Результаты измерений хранятся в соответствующих регистрах. 5 ил.
л Синхронизация
fJt, код скорости
/V3 код положении
-П
запрос
Фиг 2
Фиг.З
От 13
Мм
m
с
®иг.Ь
Кб
32
КЮЛК
Фиг.5
| Магнитострикционный преобразователь перемещений | 1980 |
|
SU956965A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Магнитострикционный дифференциальный преобразователь перемещений | 1978 |
|
SU747812A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
