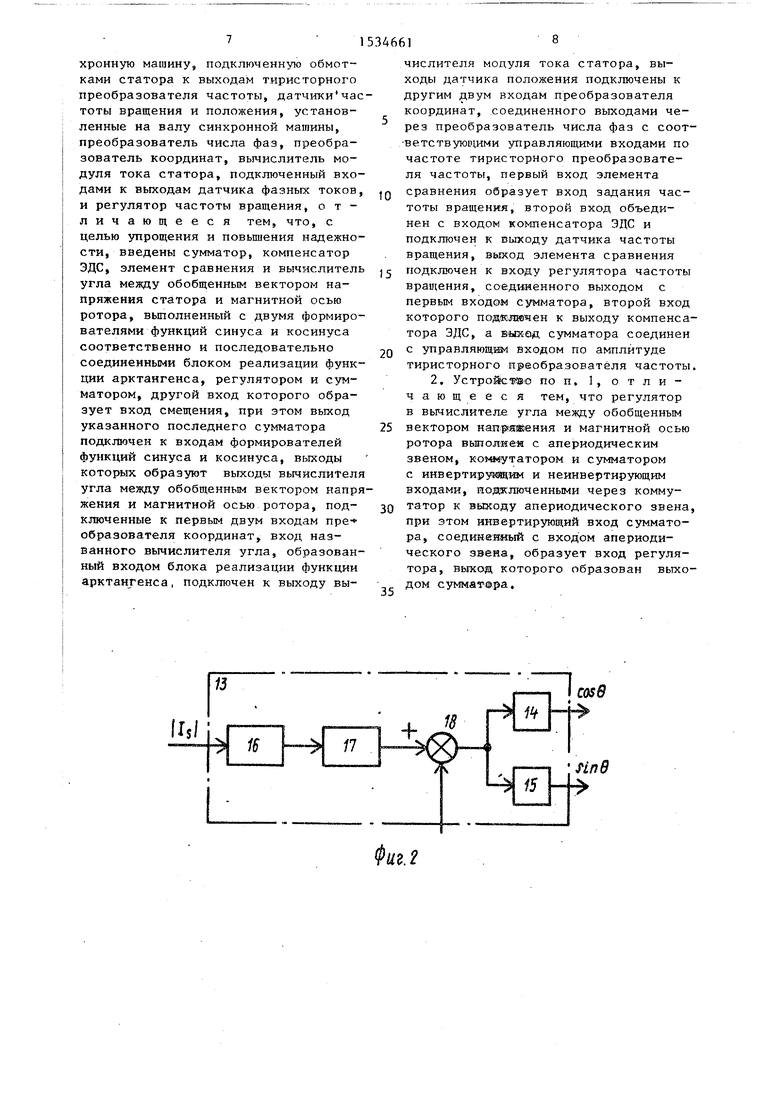
При этом выход сумматора 18 подключен к входам формирователей 14 и 15 функций синуса и косинуса, выходы которых образуют выходы вычислителя 13, подключенные к первым двум входам преобразователя 6 координат. Вход вычислителя 13, образованный входом блока 16, подключен к выходу вычислителя 7 модуля тока статора..
Выходы датчика 4 положения подключены к другим двум входам преобразователя 6 координат, соединенного выходами через преобразователь 5 чиспа
возрастания, а модуля тока - в сторону уменьшения.
Путем начального смещения указанного угла в сторону опережения можно выбрать наиболее выгодную зону углов, обеспечивающую минимальные значения тока статора при заданном токе ротора.
Устройство работает следующим образом
При равенстве нулю сигнала задания частоты вращения на входе элемента 12 сравнения будет равно нулю и задание на управляющем входе ти-
51
ристорного преобразователя 2 часто- ты, которое определяет модуль трехфазной системы напряжений
С выходов датчика 4 положения на входы преобразователя 6 координат поступают опорные сигналы, соответствующие синусу и косинусу угла между индикаторной осью датчика и магнитной осью фазы А синхронной машины 1 .
С выходов вычислителя 13 на другие входы координатного преобразователя 6 поступают сигналы, соответствующие синусу и косинусу угла, заданного смещением на входе сумматора 18 (фиг 2), На другом входе сумматора 18 сигнал в это время равен нулю, так как отсутствует ток статора
На выходе преобразователя 6 координат устанавливается начальная система сигналов, котооая через преобразователь 5 числа фаз поступает на соответствующие управляющие входы преобразователя 2 частоты.
При подаче сигнала задания частоты вращения на вход элемента 12 сравнения открываются.соответствующие тиристоры преобразователя 2 частоты, подготовленные к включению начальными сигналами с выхода преобразователя 6 координат
В обмотках статора синхронной машины 1 протекает ток Сигнал (ls) с выхода вычислителя 7 модуля статора через блок 16, реализующий функцию арктангенса, регулятор 17 и сумматор 18 поступает на входы формирователей 14 и 15 Сигналы с выходов этих формирователей, соответствующие синусу и косинусу задаваемого угла, поступают на входы преобразователя 6 координат, выходные сигналы которого получают фазовый сдвиг относительно выходных сигналов с датчика 4 положения. Это означает сдвиг по фазе об общенного вектора напряжения статора в сторону заданного направления вращения.
Возникающий момент приводит во вращение ротор машины 1 При уменьшении ошибки по частоте вращения модуль тока статора имеет тенденцию к уменьшению.
Угол опережения также уменьшается, и при выходе на установившийся режим работы модуль тока статора определяется статическим моментом
5346616
на валу машины и смещением угла на входе сумматора 18
Регулятор 17 (фиг. 3) угла между обобщенным вектором напряжения статора и магнитной осью ротора имеет передаточную функцию
10
к. .
Дифференциальная составляющая может вводиться как со знаком плюс (Т2 : Т,), так и со знаком минус (То Т.), что определяется соответ-
ствующим положением коммутатора 20. Требуемое переключение определяется по параметрам машины (для синхронных машин нормального исполнения выбираются Т 2 Т, ) а
Применение регулятора 17 с указанной передаточной функцией необходимо для обеспечения апериодического характера сходимости угла между обобщенным вектором напряжения и магнитной осью ротора и модулем тока статора.
Блок 16 (фиг. 2) реализует зависимость
0 arctg(Iifl),
Kslr
где К - коэффициент; if. - обобщенный ток ротора. По сути блок 16 является вычислителем угла смещения обобщенного вектора напряжения относительно магнитной оси ротора. Упрощение задачи вычисления указанного угла может быть связано с применением линейного блока 16 с ограничением выхода на уровне, соответствующем Q
.
Таким образом, введение в устройство для управления вентильным дви- гателем контура регулирования по углу между обобщенным вектором- напряжения статора и магнитной осью ротора и минимизация модуля тока статора обеспечивают экономичное регулиро
вание частоты вращения при более простом схемном решении по числу функциональных блоков и выполнению измерительной части по сравнению с известным решением.
Формула изобретения
1. Устройство для управления вентильным двигатетем,-содержащее си хронную машину, подключенную обмотками статора к выходам тиристорного преобразователя частоты, датчики частоты вращения и положения, установленные на валу синхронной машины, преобразователь числа фаз, преобразователь координат, вычислитель модуля тока статора, подключенный входами к выходам датчика фазных токов, и регулятор частоты вращения, отличающееся тем, что, с целью упрощения и повышения надежности, введены сумматор, компенсатор ЭДС, элемент сравнения и вычислитель угла между обобщенным вектором напряжения статора и магнитной осью ротора, выполненный с двумя формирователями функций синуса и косинуса соответственно и последовательно соединенными блоком реализации функции арктангенса, регулятором и сумматором, другой вход которого образует вход смещения, при этом выход указанного последнего сумматора подключен к входам формирователей функций синуса и косинуса, выходы которых образуют выходы вычислителя угла между обобщенным вектором напряжения и магнитной осью ротора, подключенные к первым двум входам пре- образователя координат, вход названного вычислителя угла, образованный входом блока реализации функции арктангенса, подключен к выходу вы
5
0
5
0
5
числителя модуля тока статора, выходы датчика положения подключены к другим двум входам преобразователя координат, соединенного выходами через преобразователь числа фаз с соответствующими управляющими входами по частоте тиристорного преобразователя частоты, первый вход элемента сравнения образует вход задания частоты вращения, второй вход объединен с входом компенсатора ЭДС и подключен к выходу датчика частоты вращения, выход элемента сравнения подключен к входу регулятора частоты вращения, соединенного выходом с первым входом сумматора, второй вход которого подключен к выходу компенсатора ЭДС, а выход сумматора соединен с управляющим входом по амплитуде тиристорного преобразователя частоты.
2. УстройсчФо по п. 1, отличающееся тем, что регулятор в вычислителе угла между обобщенным вектором напрчшения и магнитной осью ротора выполнен с апериодическим звеном, коммутатором и сумматором с инвертирующим и неинвертирующим входами, подключенными через коммутатор к выходу апериодического звена, при этом инвертирующий вход сумматора, соединенный с входом апериодического эвена, образует вход регулятора, выход которого образован выходом сумматера.

| название | год | авторы | номер документа |
|---|---|---|---|
| Частотно-регулируемый электропривод | 1986 |
|
SU1372579A1 |
| Вентильный электропривод | 1987 |
|
SU1480084A1 |
| Частотно-регулируемый электропривод | 1989 |
|
SU1798884A1 |
| ЭЛЕКТРОПРИВОД ПЕРЕМЕННОГО ТОКА | 1995 |
|
RU2101846C1 |
| Вентильный электропривод | 1987 |
|
SU1635243A1 |
| Устройство для регулирования частоты вращения асинхронного электродвигателя | 1987 |
|
SU1534736A1 |
| ЭНЕРГОСБЕРЕГАЮЩАЯ СИСТЕМА УПРАВЛЕНИЯ АСИНХРОННЫМ ЭЛЕКТРОПРИВОДОМ | 2012 |
|
RU2498496C1 |
| Электропривод с векторным управлением | 1987 |
|
SU1443112A1 |
| Электропривод с синхронным двигателем | 1972 |
|
SU553948A3 |
| Устройство для определения скольжения асинхронного двигателя | 1986 |
|
SU1415399A1 |

Изобретение относится к электротехнике, а именно к управляемым вентильным двигателям на основе синхронных машин с управлением положения обощенного вектора напряжения статора относительно магнитной оси ротора, и может быть использовано в установках, требующих большого диапазона регулирования частоты вращения. Целью изобретения является конструктивное упрощение и повышение надежности. В устройство введены сумматор 10, компенсатор 11 ЭДС, элемент 12 сравнения и вычислитель 13 угла между обобщенным вектором напряжения статора и магнитной осью ротора в синхронной машине 1. Вычислитель 13 выполнен с формирователями функций синуса и косинуса, блоком реализации функции арктангенса, регулятором и сумматором. В устройстве реализуется контур регулирования по углу между обобщенным вектором напряжения статора и магнитной осью ротора с минимизацией модуля тока статора, что обеспечивает экономичное регулирование частоты вращения при простом схемном решении. 3 ил. 1 з.п. ф-лы.
И
созв
fin В
Фиг. 2
Фиг.з
| Вентильный электропривод | 1984 |
|
SU1205246A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
