(Л
С
Изобретение относится к электротехнике и может быть использовано в | электроприводах различных мощных малин и механизмов, для которых харак- терны преимущественно установившиеся режимы работы, например в электроприводах непрерывных прокатных станов, электроприводах тягодутьевых устройств, аэродинамических труб, судовых и тран- |спортных электроприводах.
Цель изобретения - повышение точности минимизации потерь электроэнергии.
На чертеже представлена схема ус- 1 тройства.
| Устройство содержит последователь- но соединенные датчик 1 ЭДС двигателя, второй блок 2 умножения, интегратор 3, регулятор 4 возбуждения. Вто- 2 рой вход интегратора 3 соединен с выходом третьего блока 5 умножения, входы которого соединены с датчиком 6 напряжения возбуждения и с датчиком 7 тока возбуждения. Третий вход ин- 2 тегратора 3 соединен с выходом первого блока 8 умножения, входы которого соединены с выходом датчика 9 напряжения якоря, с выходом датчика 10 тока якоря и вторым входом второго J блока 2 умножения. Четвертый вход интегратора 3 соединен с выходом датчика 11 мощности на валу.
Устройство рабртает следующим образом .
Сигнал с датчика 1 ЭДС двигателя умножается блоком 2 . HP сигнал, снимаемый с датчика 10 тока якоря. Выходной сигнал с блока 2 умножения поступает на вход интегратора 3, где он суммируется с соответствующими знаками с выходными сигналами блоков 5 и 8 умножения и блока 11 мощности на валу. Блок 5 умножения перемножает сигналы с датчика 6 напряжения возбуждения и с датчика 7 тока возбуждения, Блок 8 умножения перемножает сигналы, снимаемые с датчика 9 напряжения якоря и с датчика 10 тока якоря.
Сумма сигналов с блоков 2, 5, 8 Ум ножения и с блока 11 мощности интегрируется интегратором 3, выходной сигнал которого поступает на регулятор 4 возбуждения, который в свою очередь изменяет ток возбуждения двигателя, контролируемый датчиком 7 до тех пор, пока на входе интегратора в установившемся режиме сумма сигналов с блоков 2, 5, 8 умножения и блока 11 мощности не бу3
д
5
0 5 Q
.„ $
п 5
дет .равна нулю. При таком управлении в установившемся режиме будет минимум потерь в электродвигателе.
Известно, что минимум потерь в двигателе при заданной скорости и некотором моменте статического сопротивления на валу будет достигаться при выполнении условия равенства переменных и постоянных потерь (2). Полные потери ДРц в двигателе можно определить как разность входной Pg и выходной Pg,btr мощностей
upfe UflI,+UeU-Me(, (1) где ГЙ1 U -HJgl,,; РВЫ) MBtfe; ий , Ue и Ifllj - соответственно напряжения и токи якоря возбуждения; Ме и Ы)й - момент и угловая скорость на валу электродвигателя.
При минимуме потерь в двигателе полные потери будут равны
2(Ц,-Ед)Т(1,(2)
где Rл - суммарное сопротивление якорной цепи; Ед, - ЭДС двигателя.
Приравниванием правых частей уровней (1) и (2) получается условие абсолютного минимума потерь в двигателе в статических режимах
и61 + 2ЕА1 1-ил1в-МвсО 0.(3)
Таким образом, управление электроприводом по уравнению (3) обеспечивается управление по абсолютному минимуму потерь в электродвигателе. Произведения UBI0 получаются блоками 5 и 2 умножения, сигналы которых поступают на интегратор 3 со знаком плюс, причем по третьему входу устанавливается коэффициент передачи интегратора 3, равный двум. Произведение , получаемое блоком 8 умножения , и сигнал мощности на валу с датчика 11 поступают с отрицательными знаками на вход интегратора 3.
Точность минимизации потерь в двигателе достигается путем реализации устройстом управления электроприводом условия абсолютного минимума (3), которое обеспечивается за счет измерения входных и выходных параметров двигателя и последующей их обработки без необходимости приближенной аппроксимации нелинейных зависимостей между управляемыми воздействиями по цепк якоря и цепи возбуждения.
Формула изобретения
Устройство для управления электроприводом постоянного тока по минимуму
потерь, содержащее датчики тока возбуждения, напряжения на якоре, тока якоря, первый блок умножения, один вход которого соединен с датчиком тока якоря, а выход - с первым входом интегратора, выход которого соединен с входом регулятора возбуждения, о т- личающееся тем, что, с целью
вход третьего блока умножения соединен с датчиком напряжения возбуждения, второй вход - с датчиком тока возбуждения, а выход соединен с вторым входом интегратора, третий вход которого подключен к выходу второго блока умножения, первый вход которого соединен с датчиком ЭДС электродвигателя, вто
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство оптимизации электропривода стенда для испытаний трансмиссий | 1988 |
|
SU1596305A1 |
| Электропривод постоянного тока с минимизацией потерь в двигателе | 1984 |
|
SU1432705A2 |
| Электропривод постоянного тока с минимизацией потерь в двигателе | 1982 |
|
SU1107239A2 |
| Электропривод | 1982 |
|
SU1072225A1 |
| Самонастраивающаяся система управления | 1985 |
|
SU1300412A2 |
| Электропривод переменного тока | 1983 |
|
SU1169128A1 |
| Вентильный электропривод | 1988 |
|
SU1510060A1 |
| Электропривод постоянного тока с двухзонным регулированием частоты вращения | 1986 |
|
SU1385216A1 |
| Устройство для управления летучими ножницами с механизмом выравнивая скоростей | 1990 |
|
SU1712077A1 |
| Электропривод постоянного тока с минимиза-циЕй пОТЕРь B дВигАТЕлЕ | 1977 |
|
SU847474A2 |
Изобретение относится к электротехнике и может быть использовано в электроприводах различных машин и механизмов, для которых характерны преимущественно установившиеся режимы работы. Цель изобретения - повышение точности минимизации потерь. Устройство содержит датчики напряжения 9 и тока 10 якоря, датчики напряжения 6 и тока 7 возбуждения, датчик ЭДС 1 электродвигателя, три блока умножения 2, 5, 8, интегратор 3 и регулятор 4 возбуждения. С помощью указанных блоков обеспечиваются измерение входных и выходных параметров электродвигателя и управление по абсолютному минимуму потерь. 1 ил.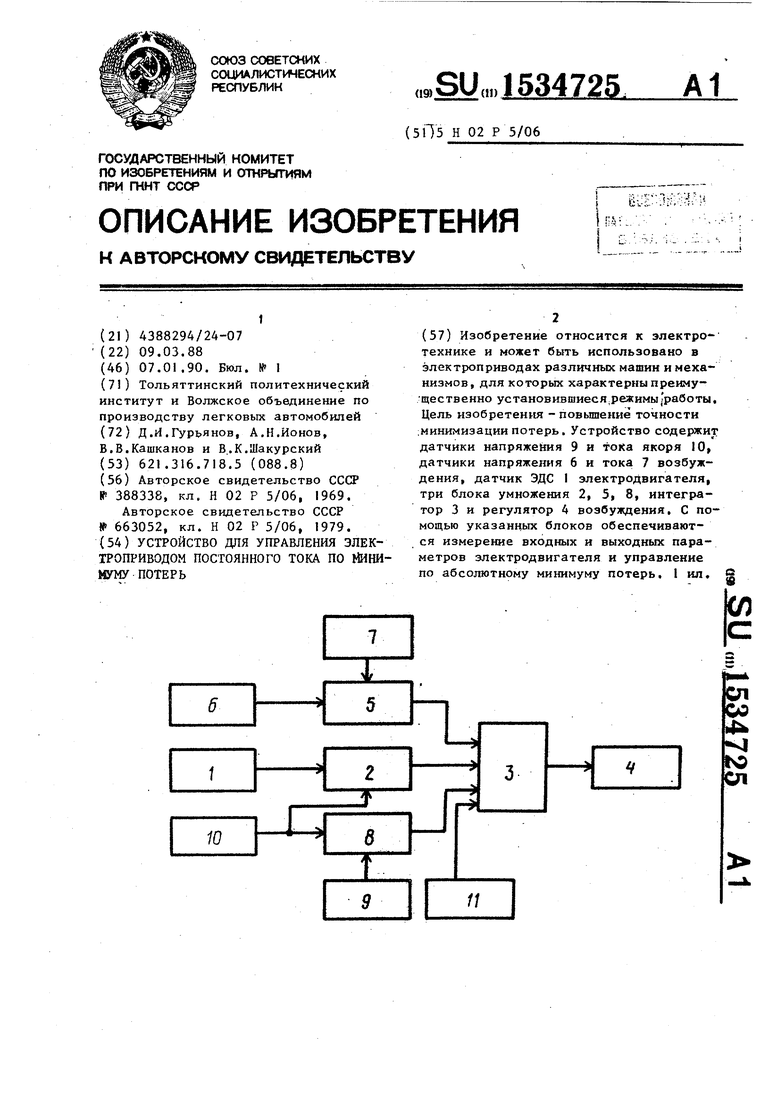
повышения точности минимизации потерь jg рой - с датчиком тока якоря, четверэлектроэнергии, в него введены датчики напряжения возбуждения, ЭДС и мощности на валу электродвигателя, второй и третий блоки умножения, первый
тый вход интегратора соединен с датчиком мощности на валу, а второй вход первого блока умножения соединен с .датчиком напряжения якоря.
| ЭЛЕКТРОПРИВОД ПОСТОЯННОГО ТОКА с ДВУХЗОННЫМ | 0 |
|
SU388338A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Электропривод постоянного тока с минимизацией потерь в двигателе | 1977 |
|
SU663052A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
