(21)4409687/25-29
(22)12,04.88
(46) 15.01.90. Бюл. Р 2
(71)Дрогобычский завод автомобильных кранов
(72)В.М.Охримович
(53)621.62 (088.8)
(56)Ковалевский В.Ф. и др. Справочник по гидроприводам горных машин. М.: Недра, 1973, с. 238, рис.109.
(54)ГИДРОРАСПРЕДЕЛИТЕЛЬ ОХРИМОВИ- ЧА В.М.
(57)Изобретение относится к аппаратуре ручного управления объемным гидроприводом, преимущественно строительных машин. Целью изобретения является повышение надежности путем улучшения
герметичности осевой полости. В сквозной осевой полости 2 корпуса 1 расположен золотник 7. Механизм осевого перемещения золотника 7 выполнен в виде жесткой V-образной тяги 12, соос- но соединенной с золотником 7 и размещенной с зазором в гибком напорном рукаве 13. Гибкий напорный рукав 13 и жесткая труба 16 образуют обводной трубопровод, соединенный со сквозной осевой полостью 2 с двух сторон от золотника 7. Гибкий напорный рукав 13 охвачен роликами 18 каретки 17 имеющей возможность осевого перемещения. Перевод золотника 7 из одного положения в другое производится осевым смещением каретки 17. 2 ил.
S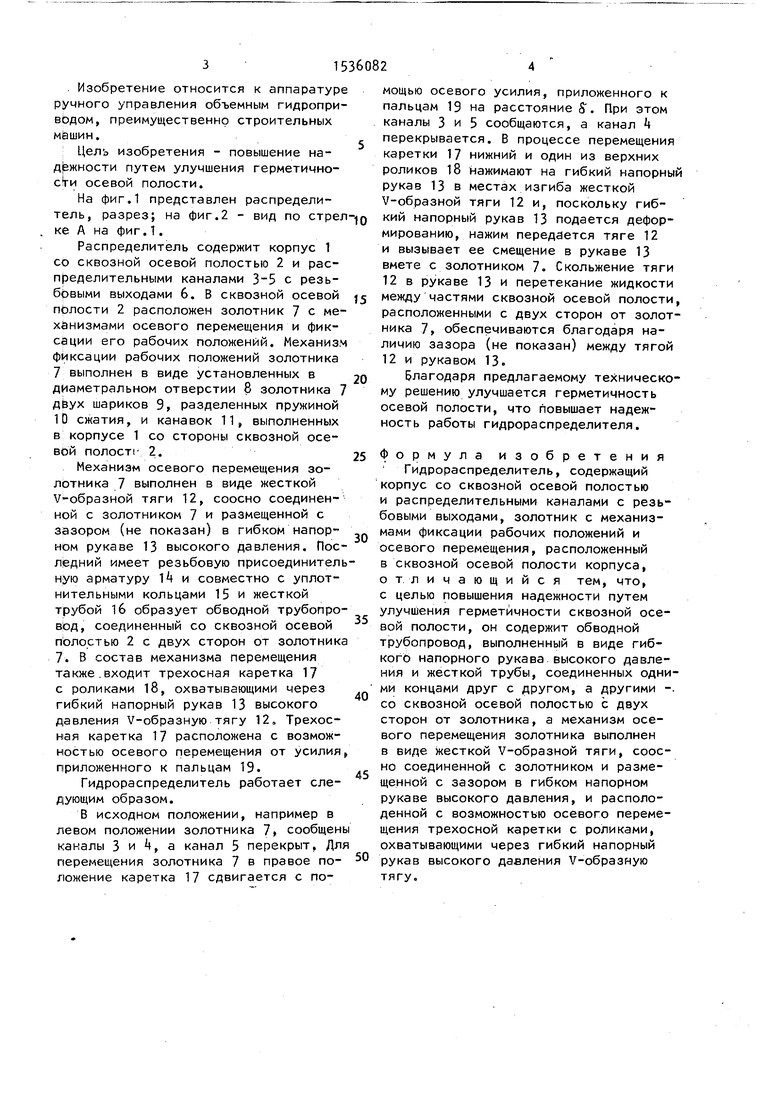
| название | год | авторы | номер документа |
|---|---|---|---|
| Система защиты гидропривода | 2020 |
|
RU2743217C1 |
| ГИДРАВЛИЧЕСКИЙ ЗОНДОВЫЙ ПЕРФОРАТОР | 2013 |
|
RU2550709C2 |
| УСТРОЙСТВО ДЛЯ ПЕРФОРАЦИИ ОБСАЖЕННОЙ СКВАЖИНЫ | 1998 |
|
RU2137915C1 |
| Система защиты гидропривода | 2019 |
|
RU2726976C1 |
| Система защиты гидропривода | 2019 |
|
RU2726959C1 |
| СТАНОК ДЛЯ ОБРУБКИ, КЛЕПКИ, ТРАМБОВКИ | 2009 |
|
RU2412783C1 |
| Станок для изготовления деталей типа коленчатых валов | 1972 |
|
SU496942A1 |
| Загрузчик сеялок | 1988 |
|
SU1565377A1 |
| СИСТЕМА ЗАЩИТЫ ГИДРОПРИВОДА | 2014 |
|
RU2579531C1 |
| Загрузчик сеялок | 1989 |
|
SU1628894A1 |
Изобретение относится к аппаратуре ручного управления объемным гидроприводом преимущественно строительных машин. Целью изобретения является повышение надежности путем улучшения герметичности осевой полости. В сквозной осевой полости 2 корпуса 1 расположен золотник 7. Механизм осевого перемещения золотника 7 выполнен в виде жесткой V-образной тяги 12, соосно соединенной с золотником 7 и размещенной с зазором в гибком напорном рукаве 13. Гибкий напорный рукав 13 и жесткая труба 16 образуют обводной трубопровод, соединенный со сквозной осевой полостью 2 с двух сторон от золотника 7. Гибкий напорный рукав 13 охвачен роликами 18 каретки 17, имеющей возможность осевого перемещения. Перевод золотника 7 из одного положения в другое производится осевым смещением каретки 17. 2 ил.
в /} п
СП
СО О
о оо 1C
Л
14
Ч 5 6
в 10 15
А
иг.1
Изобретение относится к аппаратуре ручного управления объемным гидроприводом, преимущественно строительных машин.
Цель изобретения - повышение надежности путем улучшения герметичности осевой полости.
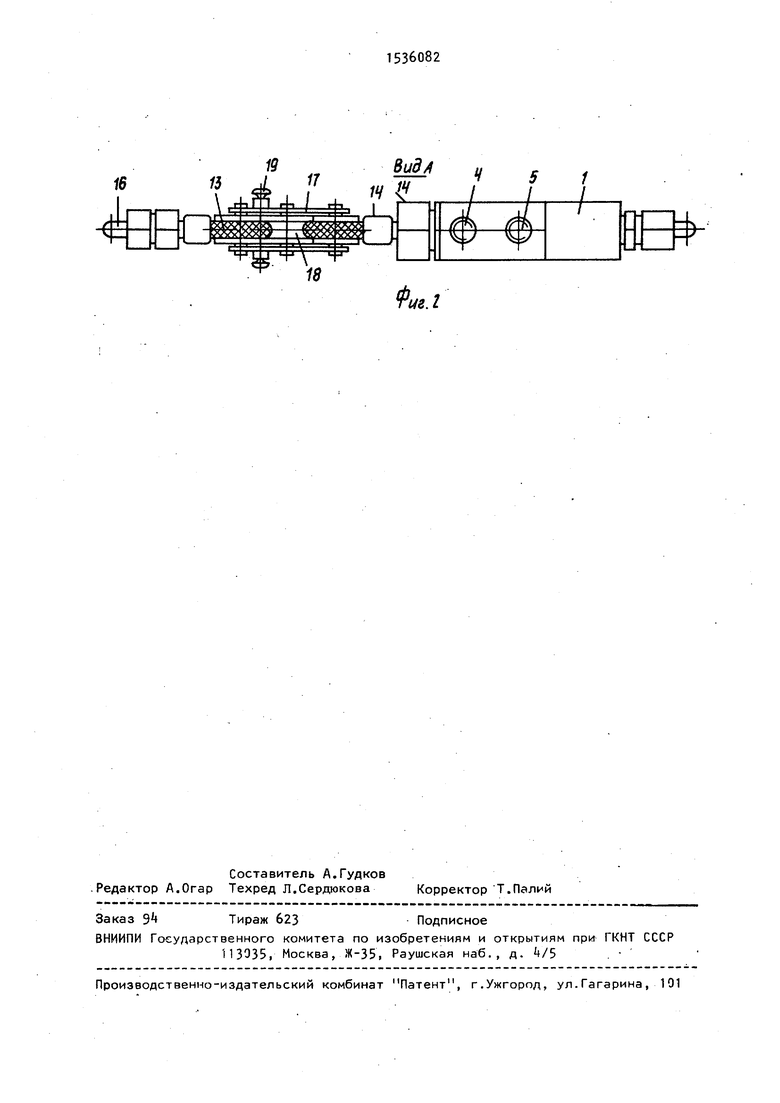
На фиг.1 представлен распределитель, разрез; на фиг.2 - вид по стрел ке А на фиг.1.
Распределитель содержит корпус 1 со сквозной осевой полостью 2 и распределительными каналами 3-5 с резьбовыми выходами 6. В сквозной осевой полости 2 расположен золотник 7 с механизмами осевого перемещения и фиксации его рабочих положений. Механизм фиксации рабочих положений золотника 7 выполнен в виде установленных в диаметральном отверстии 8 золотника 7 двух шариков 9, разделенных пружиной 10 сжатия, и канавок 11, выполненных в корпусе 1 со стороны сквозной осевой полост 2.
Механизм осевого перемещения золотника 7 выполнен в виде жесткой V-образной тяги 12, соосно соединенной с золотником 7 и размещенной с зазором (не показан) в гибком напор- ном рукаве 13 высокого давления. Последний имеет резьбовую присоединительную арматуру 1 и совместно с уплот- нительными кольцами 15 и жесткой трубой 16 образует обводной трубопровод, соединенный со сквозной осевой полостью 2 с двух сторон от золотника 7. В состав механизма перемещения также входит трехосная каретка 17 с роликами 18, охватывающими через гибкий напорный рукав 13 высокого давления V-образную тягу 12. Трехосная каретка 17 расположена с возможностью осевого перемещения от усилия, приложенного к пальцам 19.
Гидрораспределитель работает следующим образом.
В исходном положении, например в левом положении золотника 7, сообщены каналы 3 и Д, а канал 5 перекрыт. Для перемещения золотника 7 в правое по- ложение каретка 17 сдвигается с по
с
°
5
мощью осевого усилия, приложенного к пальцам 19 на расстояние Ј. При этом каналы 3 и 5 сообщаются, а канал Ц перекрывается. В процессе перемещения каретки 17 нижний и один из верхних роликов 18 нажимают на гибкий напорный рукав 13 в местах изгиба жесткой V-образной тяги 12 и, поскольку гибкий напорный рукав 13 подается деформированию, нажим передается тяге 12 и вызывает ее смещение в рукаве 13 вмете с золотником 7. Скольжение тяги 12 в рукаве 13 и перетекание жидкости между частями сквозной осевой полости, расположенными с двух сторон от золотника 7, обеспечиваются благодаря наличию зазора (не показан) между тягой 12 и рукавом 13.
Благодаря предлагаемому техническому решению улучшается герметичность осевой полости, что повышает надежность работы гидрораспределителя.
Формула изобретения
Гидрораспределитель, содержащий корпус со сквозной осевой полостью и распределительными каналами с резьбовыми выходами, золотник с механизмами фиксации рабочих положений и осевого перемещения, расположенный в сквозной осевой полости корпуса, отличающийся тем, что, с целью повышения надежности путем улучшения герметичности сквозной осевой полости, он содержит обводной трубопровод, выполненный в виде гибкого напорного рукава высокого давления и жесткой трубы, соединенных одними концами друг с другом, а другими -. со сквозной осевой полостью с двух сторон от золотника, а механизм осевого перемещения золотника выполнен в виде жесткой V-образной тяги, соосно соединенной с золотником и размещенной с зазором в гибком напорном рукаве высокого давления, и располо- денной с возможностью осевого перемещения трехосной каретки с роликами, охватывающими через гибкий напорный рукав высокого давления V-образную тягу.
Вид А
