Фш.2
3153
Изобретение относится к приборостроению и может быть использовано для проведения контрольно-измерительных поверок анемометров.
Цель изобретения - повышение точности и быстродействия поверки.
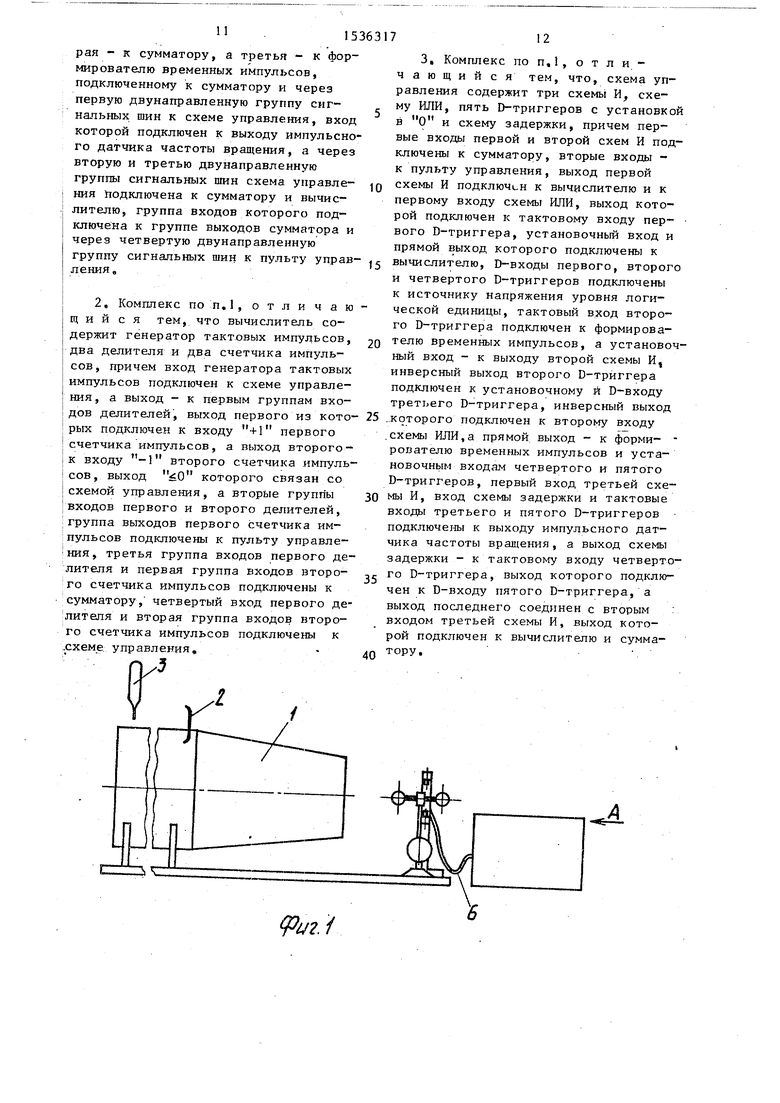
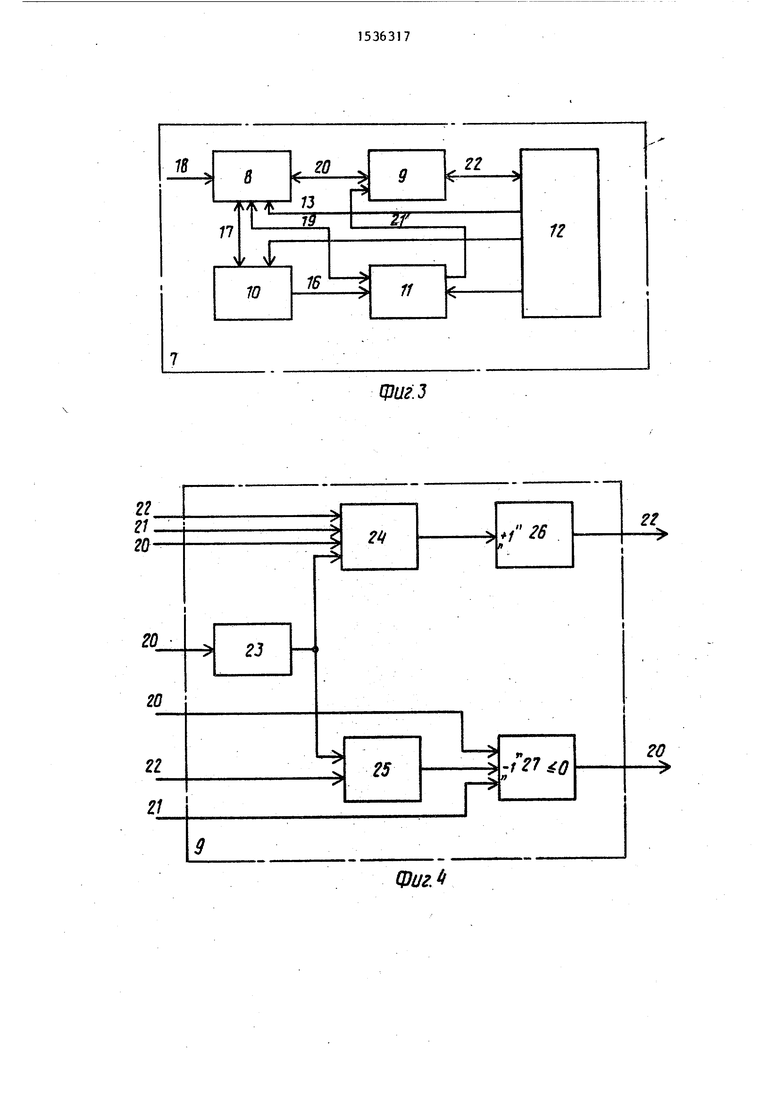
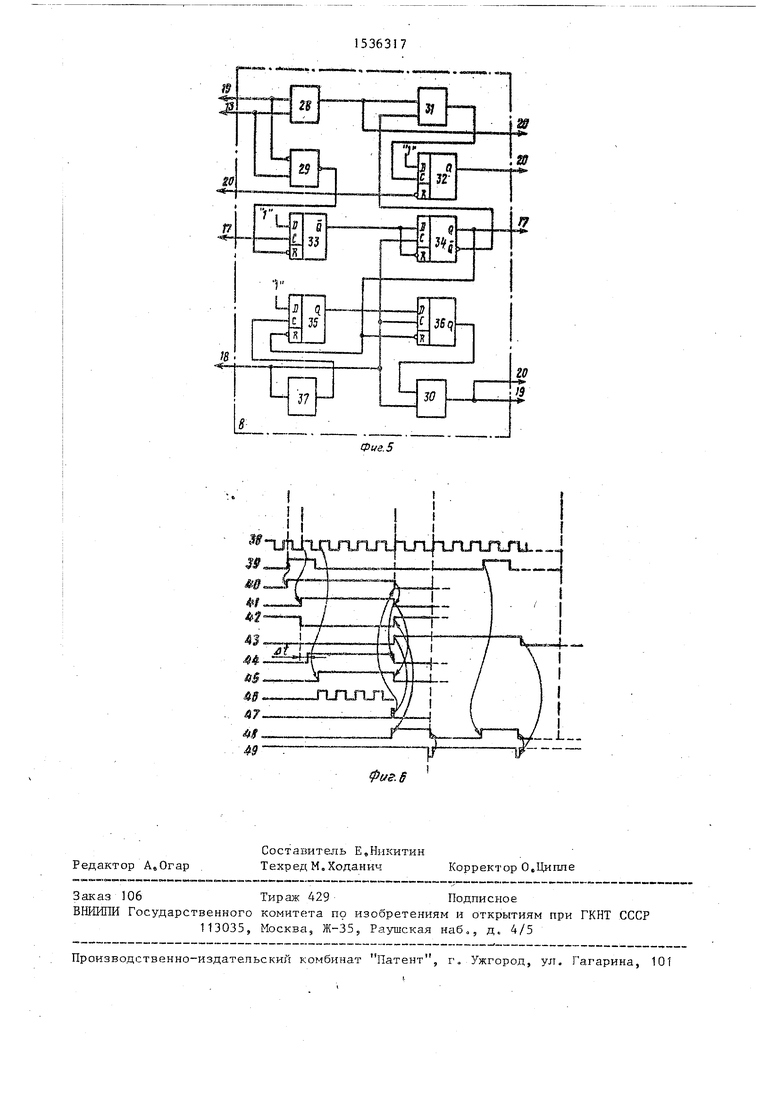
На фиг.1 представлена схема поверочного комплекса измерителен скорости ветра; на фиг.2 - вид по стрелке А на фиг.1; на фиг.З - функциональная схема блока обработки и отображения информации; на фиг.4 - функциональная схема вычислителя; на фиг.З - схема управления, на фиг,6 - времен- ные диаграммы работы схемы управления.
Поверочный комплекс измерителей скорости ветра (фиг,1) содержит аэродинамическую трубу 1 для создания воздушного потока, измерители 2 и 3 давления и температуры соответственно, а также поверяемый анемометр 4, установленный в центральной части рабочего поля, и датчик 5 частоты вра- щения, соединенный линией 6 связи с блоком 7 обработки и отображения информации .
Блок 7 обработки и отображения информации (фиг.З) включают схему 8 управления, вычислитель 9, формирователь 10 временных импульсов, сумматор 11 и пульт 12 управления. Первая группа выходов пульта 12 управления по шине 13 подключена к схеме 8 управления, вторая группа выходов по шине 14 - к сумматору 11, третья группа выходов по шине 15 - к формирователю 10 временных импульсов, который через группы выходов по шине 16 подключен к сумматору 11, а через двунаправленную группу сигнальных шин 17 к схеме 8 управления, вход схемы 8 управления по шине 6 подключен к датчику 5 частоты вращения, а две дву- направляющие группы сигнальных шин 19 и 20 подключают ее к сумматору 11 и вычислителю 9, группа входов которого по шине 21 подключена к группе выходов сумматора 11, а посредством двунаправленной группы сигнальных шин 22 вычислитель 9 подключен к пульту 12 управления.
Вычислитель 9 (фиг.4) содержит генератор 23 тактовых импульсов, первый 24 и второй 25 делители, первый 26 и второй 27 счетчики импульсов. Вход генератора 23 подключен по шине 20 к схеме 8 управления, а вы
0
5
0 5
0
5
0
5
0
5
ход соединен с первыми входами делителей 24 и 25, выход первого делителя 24 связи с входом +1 первого счетчика 26 импульсов, а выход второго делителя 25 - с входом -1 второго счетчика 27 импульсов, выход которого подключен к схеме 8 управления, первая группа входов первого делителя 24, группа входов второго делителя 25 и группа выходов первого счетчика 26 импульсов соединены с пультом 12 управления, а вторая группа входов первого делителя 24 и первая группа входов второго счетчика 2 импульсов подключены к сумматору 11, второй вход первого делителя 24 и вторая группа входов второго счетчика 27 импульсов соединены со схемой 8 управления.
Схема 8 управления (фиг.5) включает первую 28, вторую 29 и третью 30 схемы И, схему ИЛИ 31, пять D-триггеров 32-36 и схему 37 задержки. Первые входы первой и второй схем И 28 и 29 соединены с сумматором 11, а их вторые входы - с пультом 12 управления, выход первой схемы И 28 подключен к вычислителю 9 и к первому входу схемы ИЛИ 31, выход которого подключен к тактовому входу первого D-триггера 32, установочный вход и прямой выход которого соединены с вычислителем 9, D-входы первого 32, второго 33 и четвертого 35 D-триггеров подключены к источнику напряжения (не показан) уровня логической единицы, тактовый вход второго D-триггера 33 подключен к формирователю 10 временных импульсов, а его установочный вход - к выходу второй схемы И 29, инверсный выход второго D-триггера 33 соединен с D-входом и установочным входом третьего D-триггера 34, инверсный выход которого соединен с вторым выходом схемы ИЛИ 31, а прямой выход - с формирователем 10 временных импульсов и установочными входами четвертого 35 и пятого 36 D-триггеров, тактовые входы третьего 34 и пятого 36 D-триггеров, первый вход третьей схемы И 30 и вход схемы 37 задержки- подключены к датчику 5 частоты вращения, а выход схемы 37 задержки - к тактовому входу четвертого О-триггера 35 выход которого соединен с D-входом пятого D-триггера 36, я его выход подключен к второму входу третьей
51536317
схемы И 30, Которая выходом соединена с вычислителем 9 и сумматором 11 .
Поверочный комплекс работает следующим образом.
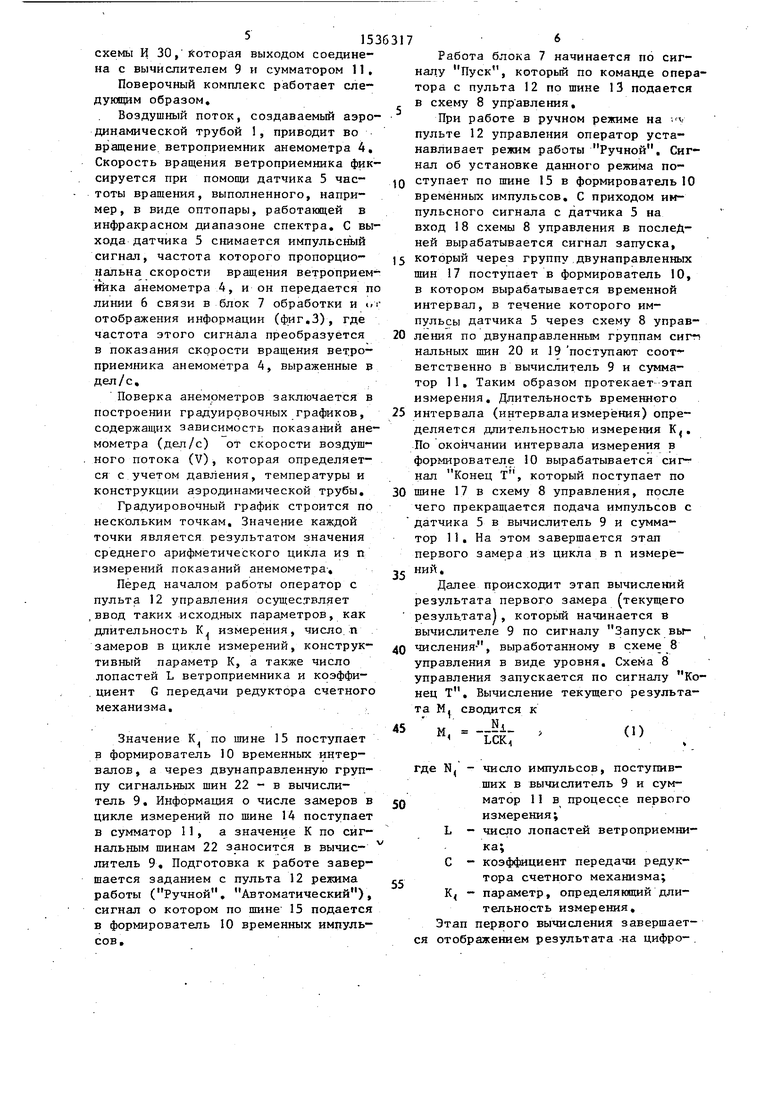
Воздушный поток, создаваемый аэро- динамической трубой 1, приводит во вращение ветроприемник анемометра 4. Скорость вращения ветроприемника фиксируется при помощи датчика 5 чнстоты вращения, выполненного, например, в виде оптопары, работающей в инфракрасном диапазоне спектра. С выхода датчика 5 снимается импульсный сигнал, частота которого пропорцио- нальна скорости вращения ветроприем иика анемометра 4, и он передается п линии 6 связи в блок 7 обработки и « отображения информации (фиг.З), где частота этого сигнала преобразуется в показания скорости вращения ветроприемника анемометра 4, выраженные в Дел/с.
Поверка анемометров заключается в построении градуировочных графиков, содержащих зависимость показаний анемометра (дел/с) от скорости воздушного потока (V), которая определяется с учетом давления, температуры и конструкции аэродинамической трубы.
Градуировочный график строится по нескольким точкам. Значение каждой точки является результатом значения среднего арифметического цикла из п измерений показаний анемометра.
Перед началом работы оператор с пульта 12 управления осуществляет ввод таких исходных параметров, как длительность К, измерения, число п замеров в цикле измерений, конструк- тивный параметр К, а также число лопастей L ветроприемника и коэффициент G передачи редуктора счетного механизма.
Значение К по шине 15 поступает
в формирователь 10 временных интервалов , а через двунаправленную группу сигнальных шин 22 - в вычислитель 9. Информация о числе замеров в цикле измерений по шине 14 поступает в сумматор 11, а значение К по сигнальным шинам 22 заносится в вычис- литель 9. Подготовка к работе завершается заданием с пульта 12 режима работы (Ручной. Автоматический), сигнал о котором по шине 15 подается в формирователь 10 временных импульсов.
0
$ 0
5 0
о
5
5
Работа блока 7 начинается по сигналу Пуск, который по команде оператора с пульта 12 по шине 13 подается в схему 8 управления.
При работе в ручном режиме на пульте 12 управления оператор устанавливает режим работы Ручной, Сигнал об установке данного режима поступает по шине 15 в формирователь 10 временных импульсов. С приходом импульсного сигнала с датчика 5 на вход 18 схемы 8 управления в последней вырабатывается сигнал запуска, который через группу двунаправленных шин 17 поступает в формирователь 10, в котором вырабатывается временной интервал, в течение которого импульсы датчика 5 через схему 8 управления по двунаправленным группам сиг-) нальных шин 20 и 19 поступают соответственно в вычислитель 9 и сумматор 11. Таким образом протекает этап измерения. Длительность временного интервала (интервалаизмерения) определяется длительностью измерения К. По окончании интервала измерения в формирователе 10 вырабатывается сигнал Конец Т, который поступает по шине 17 в схему 8 управления, после чего прекращается подача импульсов с датчика 5 в вычислитель 9 и сумматор 11. На этом завершается этап первого замера из цикла в п измерений.
Далее происходит этап вычислений результата первого замера (текущего результата, который начинается в вычислителе 9 по сигналу Запуск вычисления-, выработанному в схеме 8 управления в виде уровня. Схема 8 управления запускается по сигналу Конец Т. Вычисление текущего результата М сводится к
м
LCK1
(О
N, - число импульсов, поступивших в вычислитель 9 и сумматор 11 в процессе первого измерения; L - число лопастей ветроприемни-
ка;
С - коэффициент передачи редуктора счетного механизма; К4 - параметр, определяющий длительность измерения. Этап первого вычисления завершаетотображением результата на цифро-
вом табло пульта 12 управпения. Второй и последующий замеры также начи наются по сигналу Пуск.
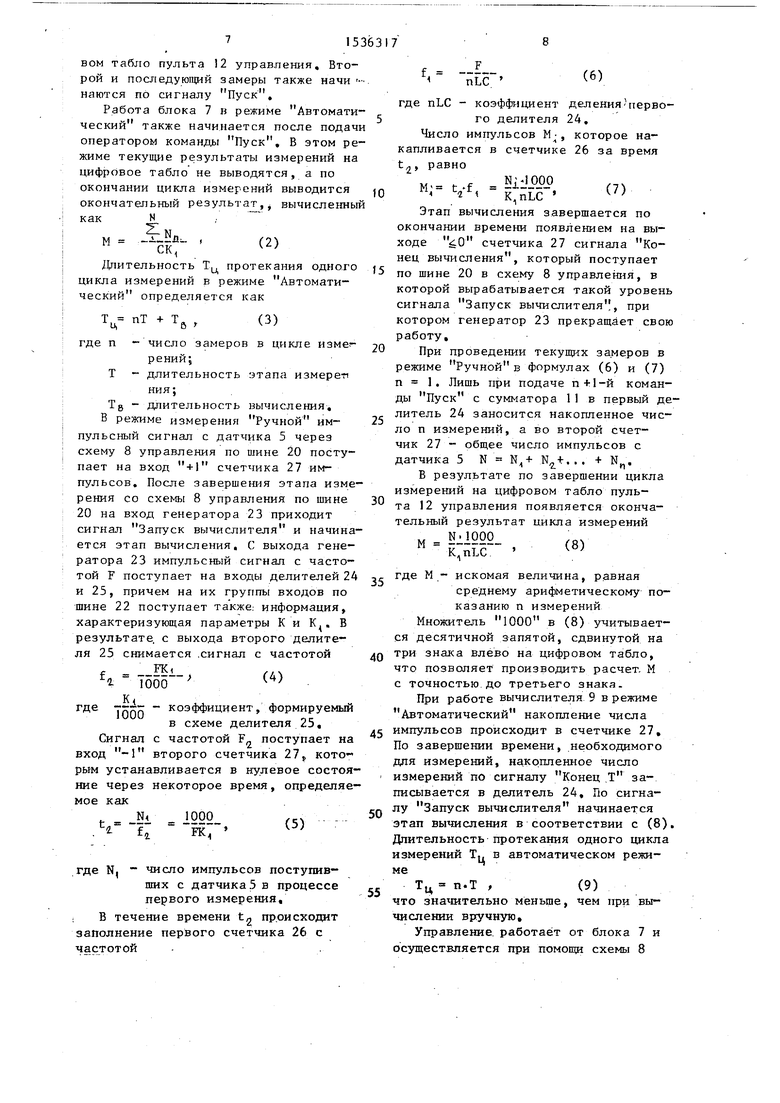
Работа блока 7 в режиме Автоматический также начинается после подачи оператором команды Пуск. В этом режиме текущие результаты измерений на цифровое табло не выводятся, а по окончании цикла измерений выводится окончательный результат,, вычисленный какN
N.
СК,
(2)
Длительность Тц протекания одного jj цикла измерений в режиме Автоматический определяется как
V пт + тб
(3)
где п - число замеров в цикле изме-
рений; Т - длительность -этапа измере-м
ния; Тв - длительность вычисления.
В режиме измерения Ручной им- пульсный сигнал с датчика 5 через схему 8 управления по шине 20 поступает на вход +| счетчика 27 импульсов. После завершения этапа измерения со схемы 8 управления по шине 20 на вход генератора 3 приходит сигнал Запуск вычислителя и начинается этап вычисления. С выхода генератора 23 импульсный сигнал с частотой F поступает на входы делителей 24 и 25, причем на их группы входов по шине 22 поступает также информация, характеризующая параметры К и К. В результате с выхода второго делителя 25 снимается сигнал с частотой
с FK(,..
(4)
К
где Tnnn коэффициент, формируемый
в схеме делителя 25, Сигнал с частотой Ґ„ поступает на
вход -1 второго счетчика 27 „ кото- рым устанавливается в нулевое состояние через некоторое время, определяемое как
NJI 1000-.
ti f.FK.
(5)
где N, число импульсов поступивших с датчика 5 в процессе первого измерения,
В течение времени t2 происходит заполнение первого счетчика 26 с частотой
f nLC
(6)
Q
j
0
5 0 5 0
5
0
5
где nLC - коэффициент деления первого делителя 24.
Число импульсов М, которое накапливается в счетчике 26 за время t2, равно
м«- t-.f - NiJOPJP(1
М Vf - К, nLC (7)
Этап вычисления завершается по окончании времени появлением на выходе .0 счетчика 27 сигнала Конец вычисления, который поступает по шине 20 в схему 8 управления, в которой вырабатывается такой уровень сигнала Запуск вычислителя, при котором генератор 23 прекращает свою работу.
При проведении текущих замеров в режиме Ручной в формулах (6) и (7) п 1. Лишь при подаче n-И-й команды Пуск с сумматора 11 в первый делитель 24 заносится накопленное число п измерений, а во второй счетчик 27 - общее число импульсов с датчика 5 N ... + Nn.
В результате по завершении цикла измерений на цифровом табло пульта 12 управления появляется окончательный результат цикла измерений
м шоо
К,nLC W
где М - искомая величина, равная
среднему арифметическому показанию п измерений
Множитель 1000 в (8) учитывается десятичной запятой, сдвинутой на три знака влево на цифровом табло, что позволяет производить расчет М с точностью до третьего знака.
При работе вычислителя 9 в режиме Автоматический накопление числа импульсов происходит в счетчике 27. По завершении времени, необходимого для измерений, накопленное число измерений по сигналу Конец Т записывается в делитель 24, По сигналу Запуск вычислителя начинается этап вычисления в соответствии с (8). Длительность протекания одного цикла измерений Тц в автоматическом режиме
п.Т
(9)
ц - li -i. ,
что значительно меньше, чем при вычислении вручную.
Управление работает от блока 7 и осуществляется при помощи схемы 8
915 3
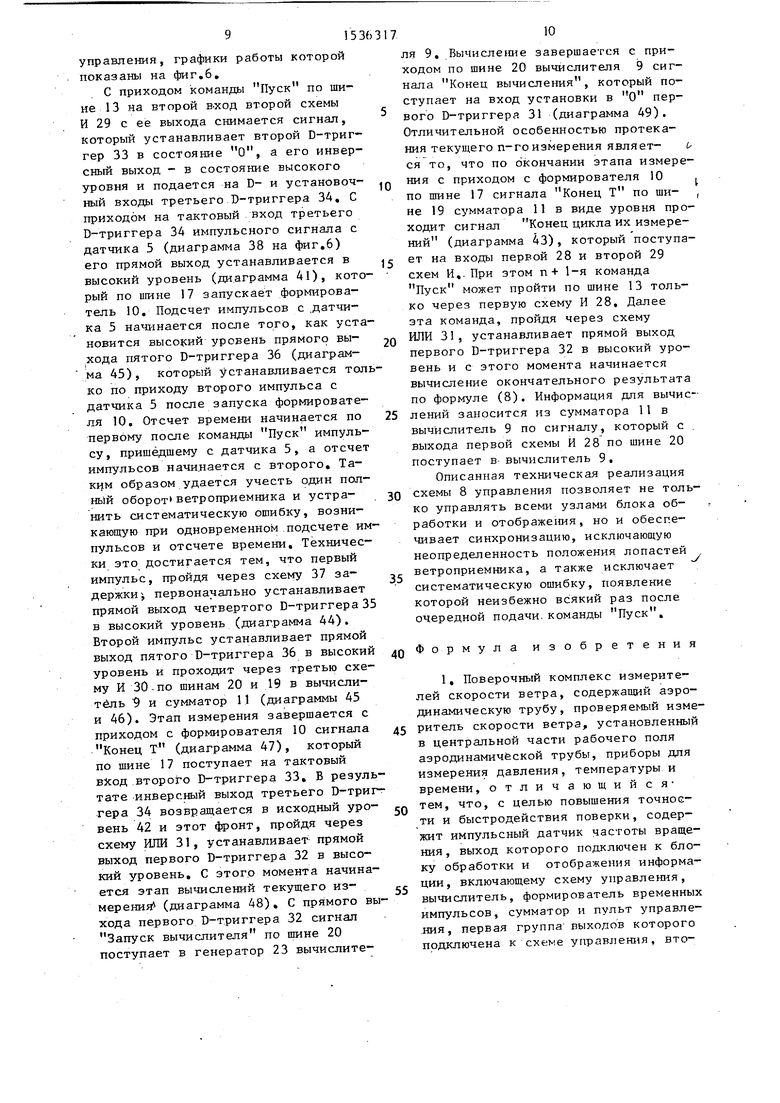
управления, графики работы которой показаны на фиг.6.
С приходом команды Пуск по шине 13 ча второй вход второй схемы И 29 с ее выхода снимается сигнал, который устанавливает второй D-триг- гер 33 в состояние О, а его инверсный выход - в состояние высокого уровня и подается на D- и установоч- ный входы третьего D-триггера 34, С приходом на тактовый вход третьего D-триггера 34 импульсного сигнала с датчика 5 (диаграмма 38 на фиг.6) его прямой выход устанавливается в высокий уровень (диаграмма 41), который по им не 17 запускает формирователь 10. Подсчет импульсов с датчика 5 начинается после того, как установится высокий уровень прямого вы- хода пятого D-триггера 36 (диаграмма 45), который устанавливается толко по приходу второго импульса с датчика 5 после запуска формирователя 10. Отсчет времени начинается по первому после команды Пуск импульсу, пришедшему с датчика 5, а отсчет импульсов начинается с второго. Таким образом удается учесть один полный оборот ветроприемника и устра- нить систематическую ошибку, возникающую при одновременном подсчете импульсов и отсчете времени. Технически это достигается тем, что первый импульс, пройдя через схему 37 за- держки, первоначально устанавливает прямой выход четвертого D-триггера 35 в высокий уровень (диаграмма 44). Второй импульс устанавливает прямой выход пятого D-триггера 36 в высокий уровень и проходит через третью схему И 30 по шинам 20 и 19 в вычислитель 9 и сумматор 11 (диаграммы 45 и 46). Этап измерения завершается с приходом с формирователя 10 сигнала Конец Т (диаграмма 47), который по шине 17 поступает на тактовый вход второго D-триггера 33, В результате инверсный выход третьего D-триг гера 34 возвращается в исходный уро- вень 42 и этот фронт, пройдя через схему ИЛИ 31, устанавливает прямой выход первого D-триггера 32 в высокий уровень. С этого момента начинается этап вычислений текущего из- мерения (диаграмма 48) . С прямого выхода первого D-триггера 32 сигнал Запуск вычислителя по шине 20 поступает в генератор 23 вычислите-
Ю
ля 9. Вычисление завершается с приходом по шине 20 вычислителя 9 сигнала Конец вычисления, который поступает на вход установки в О первого D-триггера 31 (диаграмма 49). Отличительной особенностью протекания текущего n-го измерения являет- ся то, что по окончании этапа измерения с приходом с формирователя 10 по шине 17 сигнала Конец Т по ши- не 19 сумматора 11 в виде уровня проходит сигнал Конец цикла их измерений (диаграмма 43), который поступает на входы первой 28 и второй 29 схем И, При этом п+ 1-я команда Пуск может пройти по шине 13 только через первую схему И 28, Далее эта команда, пройдя через схему ИЛИ 31, устанавливает прямой выход первого D-триггера 32 в высокий уровень и с этого момента начинается вычисление окончательного результата по формуле (8). Информация для вычислений заносится из сумматора 11 в вычислитель 9 по сигналу, который с выхода первой схемы И 28 по шине 20 поступает в вычислитель 9.
Описанная техническая реализация схемы 8 управления позволяет не только управлять всеми узлами блока обработки и отображения, но и обеспечивает синхронизацию, исключающую неопределенность положения лопастей ветроприемника, а также исключает систематическую ошибку, появление которой неизбежно всякий раз после очередной подачи команды Пуск.
Формула изобретения
1, Поверочный комплекс измерителей скорости ветра, содержащий аэродинамическую трубу, проверяемый измеритель скорости ветра, установленный в центральной части рабочего поля аэродинамической трубы, приборы для измерения давления, температуры и времени, отличающийся тем, что, с целью повышения точности и быстродействия поверки, содержит импульсный датчик частоты вращения, выход которого подключен к блоку обработки и отображения информации, включающему схему управления, вычислитель, формирователь временных импульсов, сумматор и ПУЛЬТ управпе- ния, первая группа выходов которого подключена к схеме управления, втоJ
фм.1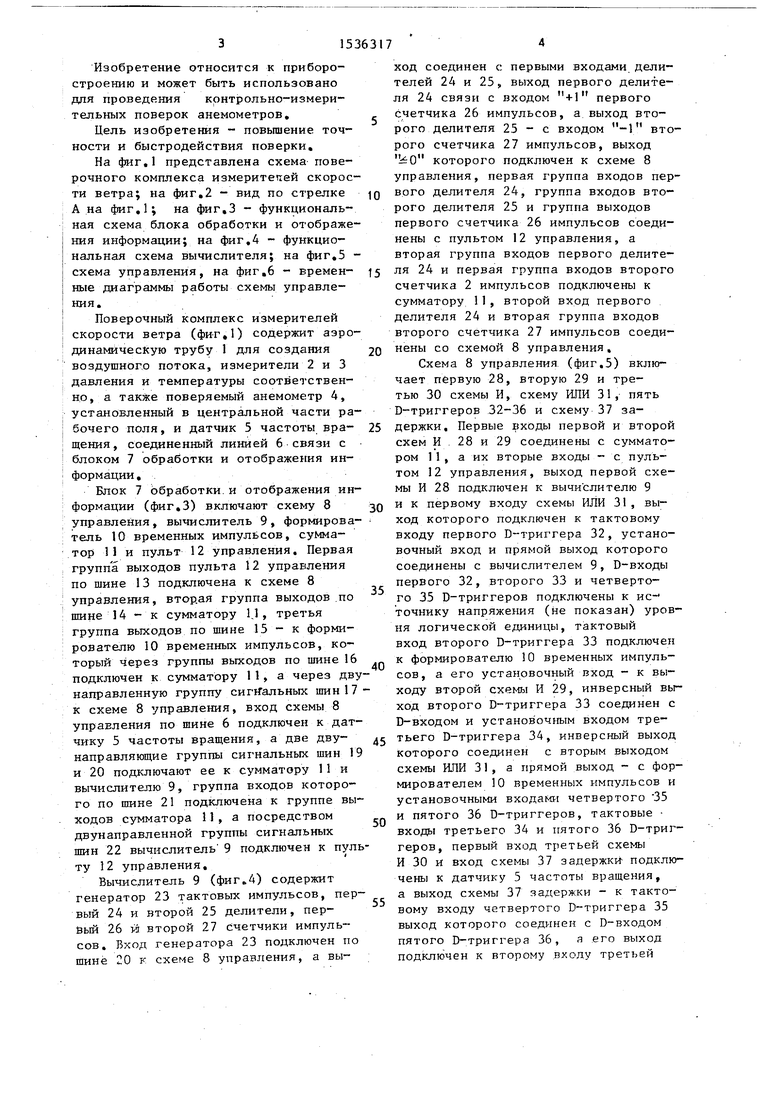
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для регулирования давления | 1988 |
|
SU1674075A1 |
| МОДЕЛИРУЮЩИЙ КОАП | 2013 |
|
RU2516703C1 |
| Устройство для регулирования массовых расходов смешиваемых продуктов | 1988 |
|
SU1695273A1 |
| Устройство для автоматизированной градуировки датчика силы | 1988 |
|
SU1606889A1 |
| Многокоординатное устройство для управления | 1989 |
|
SU1777121A2 |
| Цифровой частотомер | 1981 |
|
SU1068834A1 |
| АВТОНОМНЫЙ НАВИГАЦИОННЫЙ ПРИБОР | 1994 |
|
RU2098767C1 |
| СПОСОБ РЕГУЛИРОВАНИЯ ЖИДКОСТНОГО РАКЕТНОГО ДВИГАТЕЛЯ И УСТРОЙСТВА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 1993 |
|
RU2085755C1 |
| НЕЙРОВЫЧИСЛИТЕЛЬ | 2013 |
|
RU2553098C2 |
| Устройство измерения частотных характеристик группового времени запаздывания четырехполюсников | 1988 |
|
SU1631511A1 |
Изобретение относится к приборостроению и может быть использовано для проведения контрольно-измерительных поверок анемометров. Целью изобретения является повышение точности и быстродействия поверки. Скорость вращения ветроприемника анемометра 4 фиксируется при помощи датчика 5 частоты вращения, с выхода которого снимается импульсный сигнал и поступает по линии связи в блок 7 обработки и отображения информации, где частота этого сигнала преобразуется в показании скорости вращения, что позволяет осуществить синхронизацию измерений и исключить систематическую ошибку. 2 з.п. ф-лы, 6 ил.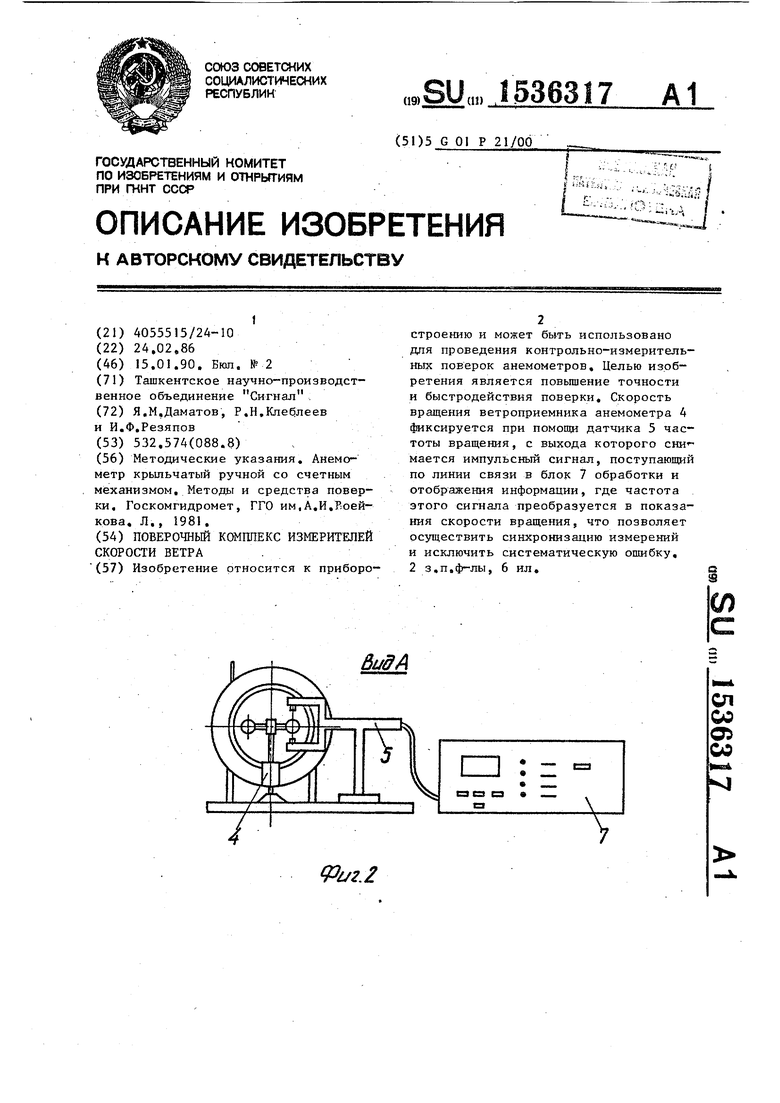
Фиг.З
Шиг
. .
Фиг.§
| Методические указания | |||
| Анемометр крыльчатый ручной со счетным механизмом | |||
| Методы и средства поверки | |||
| Госкомгидромет, ГГО им.А.И.Роей- кова, Л., 1981. |
