Изобретение относится к фотограм- метрии и может быть использовано для изучения динамических процессов.
Целью изобретения является повышение точности и расширение диапазона определяемых смещений объекта.
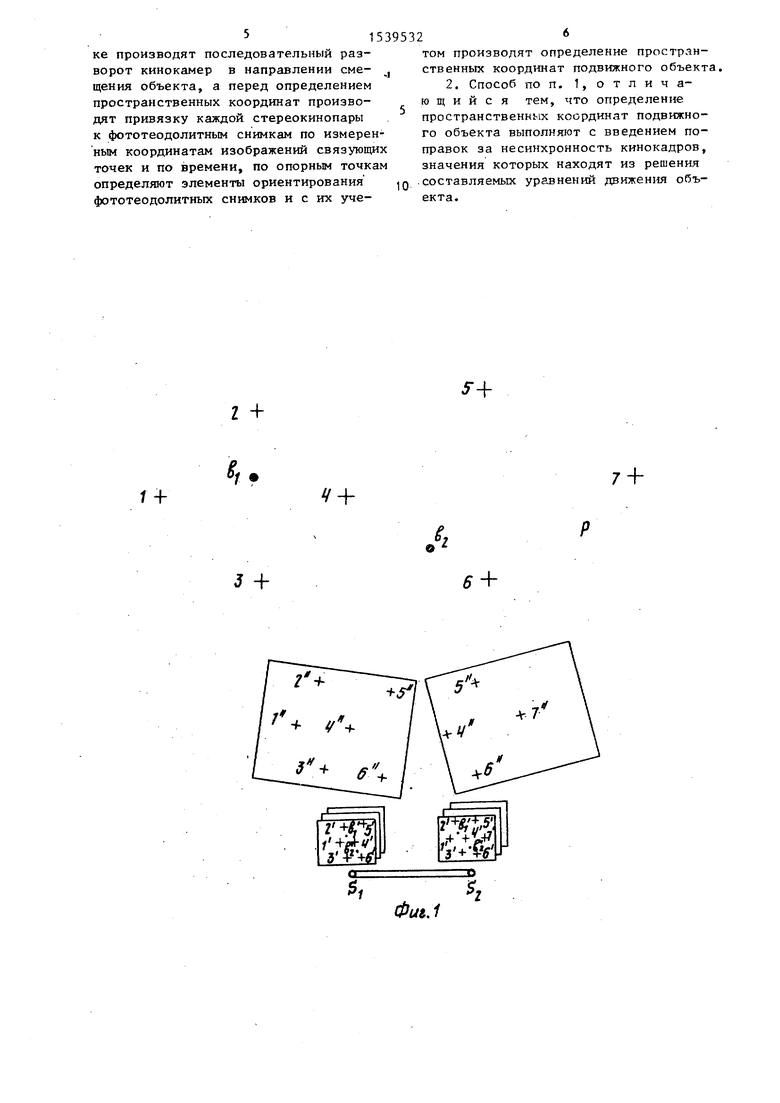
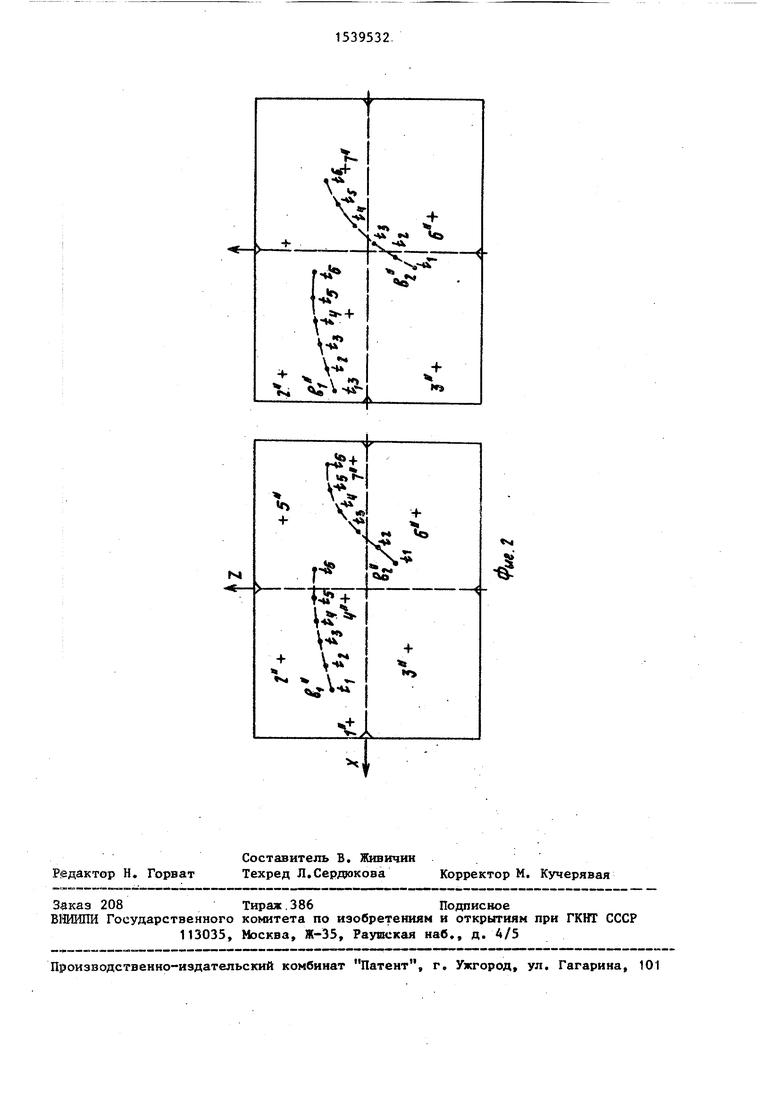
На фиг. 1 показана схема стерео- фотограмметрической съемки динамичеср ких объектов; на фиг. 2 - изображения динамических объектов на фототеодолитных снимках.
Способ осущестсляют следующим образом.
До начала движения объектов Ц равномерно распределяют маркированные опорные и связующие точки 1-5,. ... на земной поверхности пространства событий, определяют координаты
опорных точек и точек фотографирования St и SQ геодезическими методами. Фотографируют опорные и связующие точки фототеодолитами с точек фотографирования, получают стереофото- пару. Устанавливают на те же точки фотографирования вместо фототеодолитов кинокамеры.
При появлении движущихся объектов Ь; в пространстве событий начинают следящую стереокиносъемку этих объектов на фоне опорных и связующих точек, которая приводит к изменению угловых элементов внешнего ориентирования кинокамер. В процессе киносъемки в кинокадрах фиксируются текущие значения времени от цифровых индикаторов электронных часов или отметчиков времени tt . По координатам опорных точек Xjs Y;, Zj, координатам точек фотографирования XS), Уе„ Ze, и измеренным координатам изображений опорных точек , ... на стерео- фотопаре, определяют элементы ориентирования фототеодолитных снимков. Выбирают из кинофильмов двух кинокамер кинокадры с близкими или одинаковыми значениями времени, эти кинокадры образуют стереокинопару. На стереокинопаре измеряюткоординаты изображений связукщих точек 11 -5 , , ... и измеряют координаты изображений динамических объектов.Ъ1; . По измеренным координатам изображений связующих точек 1-5, ... и координатам тех же связующих точек 1й-5й, ..., а также координатам изображений объектов bj с помощью проективных преобразований определяют координаты объектов на фототеодолитных снимах по формулам
- a«xj,
за a«ix|
+ а.ъ + Zj
+ a2Jz;
+ аэе+
aujx; + 1
(1)
+ 1 +
где а„ , , , aa(, atj as, , а34 аэз элементы матрицы аффинных преобразований;
х, Z- - измеренные координаты изображений связующих точек на кинокадрах;
х - , Z- - измеренные координаты изображений связующих точек на фототеодолитных снимках.
Элементы матрицы аффинных преобразований находят по методу наименьших квадратов под условием
V PV мин
(2)
Затем определяют поправки за несинхронность кинокадров стереокино- пары по уравнениям движения объектов для левого фототеодолитного снимка по осям х и Z по формулам:
15
их Сох+ Cnt,- + C-nt + .... fiZ - Сог+ Cat; + Cezt5, + ....
(3)
и аналогично для правого фототеодолитного снимка:
20
i
- С0ц + С,к tj + + ...,
С
0
ог
(4)
Crttf + С
ZZ i
25 где t-, - интерполированное время.
0
5
0
5
0
5
Системы (3) и (4) решают относительно коэффицинтов Cor, С и , Сяк, С 02, г г г г г г г
U47L ъ 2Z -ОХ ь« OIJ UHZ
Cgz по методу наименьших квадратов под условием (2). По элементам ориентирования фототеодолитных снимков и определенным координатам динамических объектов на фототеодолитных снимках определяют пространственные координаты динамических объектов.
Формула изобретения
1.Способ стереофотограмметрической съемки подвижного объекта, включающий маркирование опорных точек, определение их координат и координат концов базиса фотографирования, установку на концах базиса и ориентирование двух кинокамер, синхронную киносъемку с фиксацией времени, измерение координат изображения динамического объекта и опорных точек на стереоки- нопарах, определение пространстсен- ных координат динамического объекта и их обработку, отличающий- с я тем, что, с целью повышения точности и расширения диапазона определяемых смещений объекта, на местности дополнительно маркируют связующие точки, с базиса фотографирования выполняют фототеодолитную съемку опорных и связующих точек, при киносъемке производят последовательный разворот кинокамер в направлении сме- щения объекта, а перед определением пространственных координат производят привязку каждой стереокинопары к фототеодолитным снимкам по измеренным координатам изображений связующих точек и по времени, по опорным точкам определяют элементы ориентирования фототеодолитных снимков и с их уче
том производят определение пространственных координат подвижного объекта.
2. Способ по п. 1, отличающийся тем, что определение пространственных координат подвижного объекта выполняют с введением поправок за несинхронность кинокадров, значения которых находят из решения составляемых уравнений движения объекта.

| название | год | авторы | номер документа |
|---|---|---|---|
| СПОСОБ ОПРЕДЕЛЕНИЯ ИЗМЕНЕНИЯ ПОЛОЖЕНИЯ ТОЧЕК ОБЪЕКТА | 1991 |
|
RU2012853C1 |
| Способ обновления карты,созданной по аэрофотоснимкам | 1984 |
|
SU1216648A1 |
| Способ стереофотограмметрической съемки подвижного объекта | 1975 |
|
SU649952A1 |
| Способ стереофотограмметрической съемки подвижных объектов | 1974 |
|
SU502222A1 |
| Съемочная камера для получения измерительных рентгеновских снимков | 1978 |
|
SU746185A1 |
| Стереофотограмметрический способ определения характеристик взволнованной поверхности моря | 1986 |
|
SU1471072A1 |
| СПОСОБ ФОТОГРАММЕТРИЧЕСКОЙ КАЛИБРОВКИ ФОТОКАМЕР | 2006 |
|
RU2308001C1 |
| Способ фототеодолитной крупномасштабной съемки подземных выработок | 1977 |
|
SU673845A1 |
| СПОСОБ ПОЛУЧЕНИЯ НЕПРЕРЫВНОГО СТЕРЕОИЗОБРАЖЕНИЯ ЗЕМНОЙ ПОВЕРХНОСТИ | 2024 |
|
RU2832645C1 |
| Способ фотограмметрического определения кинематических параметров недеформирующегося объекта | 1982 |
|
SU1080015A1 |
Изобретение относится к фотограмметрии. Цель изобретения - повышение точности определения пространственных координат динамических объектов и расширение диапазона определяемых смещений. Согласно способу стереофотограмметрической съемки динамических объектов равномерно распределяют маркированные опорные и связующие точки на земной поверхности, определяют координаты опорных точек и точек фотографирования, фотографируют фототеодолитами опорные и связующие точки с точек фотографирования, производят следящую киносъемку динамических объектов на фоне опорных и связующих точек с тех же точек фотографирования с фиксацией времени на кинокадрах, выполняют координатно-временную привязку стереокинопар к фототеодолитным снимкам по измеренным координатам изображений связующих точек и времени, зафиксированном на кинокадрах, определяют элементы ориентирования фототеодолитных снимков, вводят поправки за несинхронность кинокадров в координаты динамических объектов на фототеодолитных снимках, определяют пространственные координаты динамических объектов по координатам объектов на фототеодолитных снимках и элементам ориентирования фототеодолитных снимков . 2 ил.
Г+
Z +
+
3 +
+
7-Ь
ff +
Фие.1
I
| Киваев А.И., Мочалкин С.Ф | |||
| Определение рабочих характеристик гидроциклона методом скоростной стерео- киносъемки | |||
| Сб.научн.тр.НИИПГ, М.: ЦНИИГА иК, 1981, вып.5, с | |||
| Деревянное стыковое скрепление | 1920 |
|
SU162A1 |
| Стереофотограмметрическая съемка инженерных взрывов (ред | |||
| кол.Барха- това К.Л., Бобрышев В.М | |||
| и др.),М.: ВАГО АН СССР, 1977, с | |||
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
