Изобретение относится к технике управления электрическими машинами - и может быть использовано в двухкоор- динатном электроприводе.
Цель изобретения - повышение надежности путем предотвращения продавливания воздушной опоры при несимметричной нагрузке якоря.
Осуществление способа рассматривается на примере работы устройства для реализации способа.
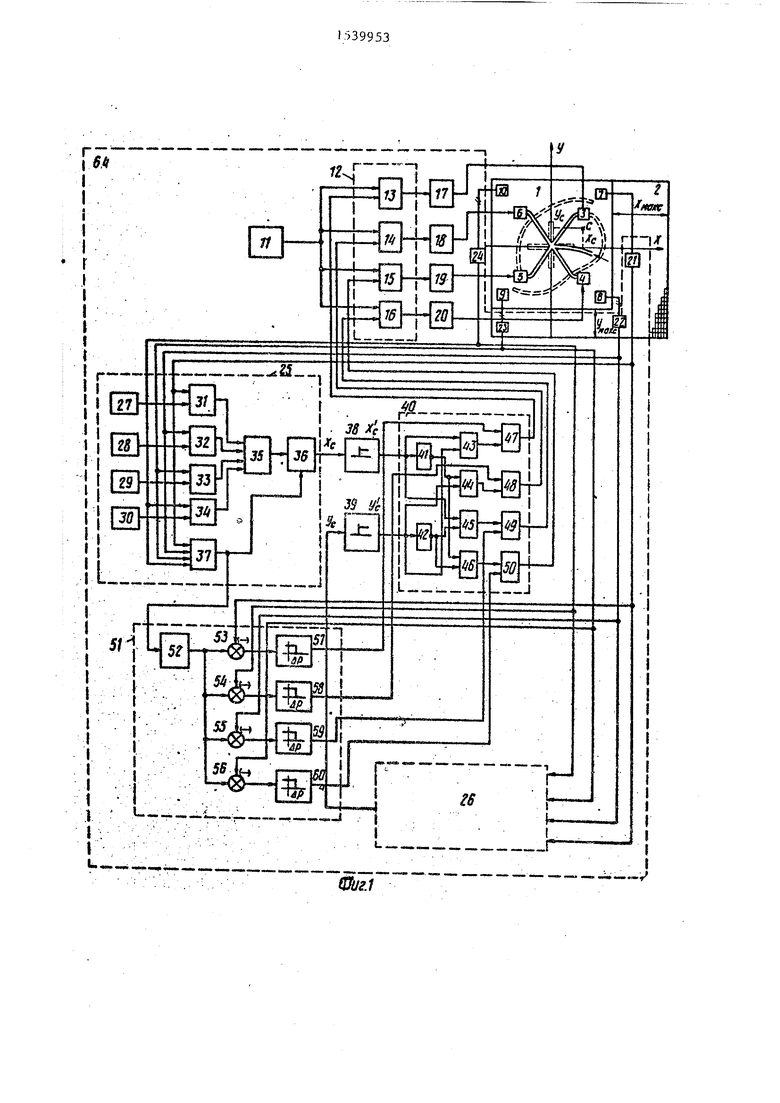
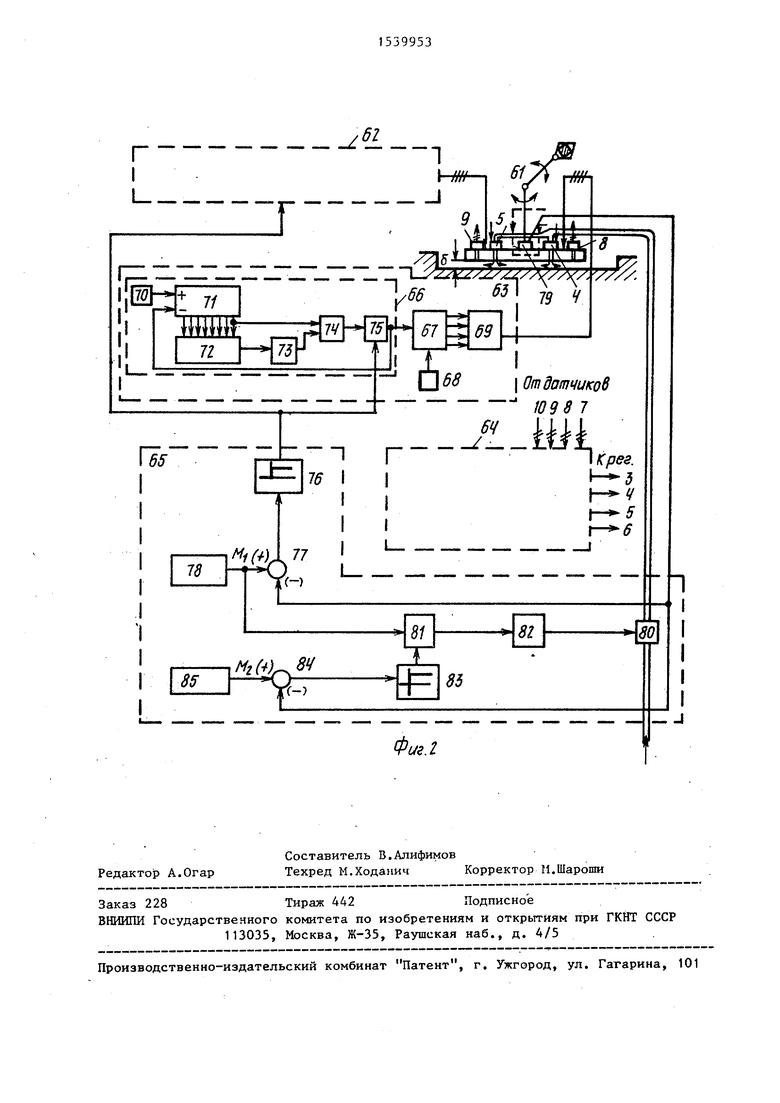
На фиг.1 приведена схема блока вы- равнивания воздушного зазора; на фиг.2 - блок-схема устройства управления.
Планарный шаговый двигатель сое- , тоит из подвижного якоря 1 и неподвижного индуктора 2. На элементарных пневмовходах якоря установлены управляемые регуляторы расхода воздуха р(УРРВ) 3-6. Кроме того, просверлены специальные отверстия и установлены датчики 7-10 давления. На якоре 1 могут быть просверлены дополнительные пневмовходы, каждый из которых соединяется с тем УРРВ, который установлен в противолежащей относительно центра зоне якоря 1 (показано пунктиром для УРРВ 3 и 5, аналогичные воздухопроводы от УРРВ 4 и 6 не показаны). Управсл со со ф ел
СО
ляющие сигналы от задатчика 11 поступают через набор 12 логических элементов И 13-16. Выход каждого из логических элементов соединен через соответствующий из усилителей 17-20 с одним из управляемых регуляторов 3-6. Каждый из датчиков 7-10 давления соединен через соответствующие усилители 21-24 с вычислителями 25 и 26. Вычислители выполнены одинаковыми, поэтому представлена структура только вычислителя 25, включающего в себя задатчики 27-30 координат датчиков давления, подключенных к входам бло- ков 31-34 умножения, вторые входы которых соединены с выходами усилителей 17-20, а выходы - с входами первого сумматора 35, выход которого подключен к входу блока 36 деления, второй вход которого соединен с выходом второго сумматора 37, входы которого соединены с вторыми входами блоков 31-34 умножения.
Выходы вычислителей 25 и 26 через пороговые элементы 33 и 39 подсоединены к входам дешифратора 40, состоящего из двух инверторов 41 и 42, четырех элементов И 43-46 и четырех элементов ИЛИ 47-50. Выход сумматора 37 соединен с задающим блоком 51 пороговых элементов, включающим в себя блок 52 деления на число установленных датчиков давления. Вычислитель 26 не имеет эт.ой связи. В блок 51 входят также сравнивающие элементы 53-56 и пороговые Ълементы 57-60.
На якоре 1 установлен исполнительный механизм 61, например, манипулятор.
На фиг.2 представлена результирующая блок-схема устройства управления. В ее состав входят также два одинаковых по структуре канала 62 и 63 управления декартовым перемещением по координатам, канал 64 управ- ления воздушным зазором в функции смещения центра масс механизма относи1/-с
тельно центра масс якоря, канал 65
управления воздушным зазором в функции действия на якорь 1 разворачивающего момента. Например, канал 63 состоит из задатчика 66 частоты управления, распределителя 67 импульсов, задатчика 68 направления движения, усилителя 69 мощности, задатчика 70 величины перемещения по координате, реверсивного счетчика 71, выходы которого через преобразователь 72 код0
-п
5 30
40
45
50
35
аналог связаны с входом управляемого генератора 73 импульсов, частота выходных импульсов которого пропорциональна числу импульсов, поданных на вход +, т.е. величине перемещения. Выход генератора 73 подключен к одному из входов элемента И 74, к второму входу которого подключен нулевой разряд реверсивного счетчика 71. Выход элемента И 74 через логический элемент И 75 одновременно соединен с входом распределителя 67 импульсов и с входом - реверсивного счетчика 71.
В состав канала 65 входят пороговый1 элемент 76, на вход которого подается сигнал с выхода первого суммирующего элемента 77. Суммирующий вход элемента 77 соединен с задатчиком 78 допустимого по условию движения разворачивающего момента Ну, а вычитающий вход соединен с датчиком 79 момента. Выход задатчика 78 допустимого момента соединен с УРРВ 80 через элемент И , и усилитель 82. На второй вход элемента И 81 подается сигнал от второго порогового элемента 83, который соединен с выходом второго суммирующего элемента 84.. Суммирующий вход этого элемента соединен с задатчиком 85 максимально допустимого разворачивающего момента 11 , а вычитающий вход соединен с датчиком 79 момента.
Устройство для осуществления способа работает следующим образом.
Допустим, что действующий на якорь 1 разворачивающий момент со стороны манипулятора 61 отсутствует.Управляющий сигнал от задатчика 78 через логический элемент И 81 и усилитель 82 поступает на УРРВ 80 и открывает его. В результате воздух поступает непосредственно к якорю и через отверстия проходит в зазор между якорем 1 и индуктором 2. На задатчике 11 устанавливают сигнал, который через усилители 17-20 поступает на обмотки УРРВ 3-6. Если центр масс установленного механизма 61 смещен, например, в т.С(Х,У), то когда давление в зоне УРРВ 5 станет меньше среднезадан- ного на установленную величину др, при которой еще отсутствует продав- ливание пневмоопоры в зоне УРРВ 3, с выхода элемента 60 блока 51 пороговых элементов на второй вход логического элемента ИЛИ 50 поступает сигнал логического нуля (на первом входе элемента ИЛИ 50 также присутствует логическии нуль, поступающий с дешифратора 40). В результате на втором входе элемента 15 устанавливается логический нуль, УРРВ 5 отключается и увеличенный зазор в зоне УРРВ 5 начинает уменьшаться, благодаря чему давление сжатого воздуха начинает в этой зоне возрастать. Когда оно возрастет на величину др, логический сигнал на пороговом элементе 60 изменяется с нуля на единицу, благодаря чему сигнал от задатчика 11 через элемент 15 проходит. В результате УРРВ 5 включается вновь. Если, например, смещение центра масс манипулятора вновь создает в менее нагруженной зоне якоря 1 давление, меньшее среднезаданного на др, процесс повторяется.
Когда действующий на якорь 1 разворачивающий момент И меньше допустимого по условию движения, то на фазные обмотки поступают управляющие команды. Как только разворачивающий момент станет больше момента М, то на втором входе элемента И 75 устанавливается логический нуль и в результате управляющая частота на распределитель 67 импульсов и на вычитающий вход реверсивного счетчика 71 не проходит - якорь останавливается. Если разворачивающий момент продолжает нарастать и становится больше максимально допустимого разворачивающего момента М2, то УРРВ 80 закрывается. Сжатый воздух при этом сбрасывается в атмосферу. Воздушный зазор о между якорем 1 и индуктором 2 уменьшается до нуля. По окончании действия разворачивающего момен0
5
0
5
0
5
0
та исходное состояние восстанавливается в обратной последовательности, после чего двигатель отрабатывает оставшуюся часть пути.
Формула изобретения
1.Способ управления планарным шаговым электродвигателем на воздушной опоре, состоящий в том, что в пространство между якорем и индуктором подают воздух через отверстия в якоре, на обмотки якоря подают управляющие импульсы, фиксируют превышение разворачивающим моментом предельного значения и прекращают подачу воздуха на время этого превышения, отличающийся тем, что, с целью повышения надежности путем предотвращения продавливания воздушной опоры при несимметричной нагрузке якоря, дополнительно измеряют давление воздуха в двух точках воздушной опоры, расположенных вдоль прямой, соединяющей центр якоря с отверстиями подачи воздуха, определяют среднее арифметическое этих давлений и величину отклонений меньшего из них от среднего и при превышении отклонением заданной величины прекращают подачу воздуха в отверстие на якоре, ближайшее к точке пониженного давления, и вновь подают воздух в это отверстие после выравнивания давлений
в указанных точках.
2.Способ поп.1, отличающийся тем, что при прекращении подачи воздуха в зону пониженного давления увеличивают подачу воздуха в зону повышенного давления.
Г
-i6LГ .J
I ttll f//f
| название | год | авторы | номер документа |
|---|---|---|---|
| Планарный шаговый электропривод | 1988 |
|
SU1601733A1 |
| Устройство для управления планарным шаговым электродвигателем | 1988 |
|
SU1601732A1 |
| Планарный шаговый электропривод | 1989 |
|
SU1683167A1 |
| Устройство для статической балансировки роторов | 1984 |
|
SU1186980A1 |
| Вентильный электродвигатель | 1987 |
|
SU1508318A2 |
| Устройство для перемещения и колебаний сварочной горелки | 1988 |
|
SU1547995A1 |
| СПОСОБ ФУНКЦИОНИРОВАНИЯ ИНФОРМАЦИОННО-ВЫЧИСЛИТЕЛЬНОЙ СИСТЕМЫ РАКЕТЫ И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2008 |
|
RU2368857C1 |
| Двухзонная установка для индукционного нагрева | 1983 |
|
SU1092758A1 |
| Электропривод транспортного средства | 1986 |
|
SU1359171A1 |
| Устройство для накачки шин автомобиля | 1989 |
|
SU1668181A1 |
Изобретение относится к электротехнике, его целесообразно использовать при создании гибких автоматизированных производств. Цель изобретения состоит в повышении надежности путем предотвращения продавливания воздушной опоры при несимметричной нагрузке якоря. Способ состоит в том, что в пространство между якорем и индуктором через отверстия в якоре, расположенные в симметричных зонах, подают сжатый воздух, на фазные обмотки якоря подают управляющие команды, в указанных зонах измеряют давление сжатого воздуха, вычисляют среднее давление и определяют наименее нагруженную зону. Когда давление в этой зоне станет меньше среднего на заранее заданную величину, подачу воздуха в эту зону прекращают, а когда давление в этой зоне вновь возрастает на эту величину, подачу воздуха восстанавливают. Если на якорь действует недопустимый разворачивающий момент, то якорь фиксируют на индукторе на период действия этого возмущения. 1 з.п.ф-лы, 2 ил.
I ГТГГП -jri raTi-i
,
, У
i #r
Mi (
-
П
3
-1
w
| Луценко В.Е., Рубцов В.П | |||
| Электропривод и автоматизация промышленных установок, т.6/ВИНИТИ, 1978 | |||
| Устройство для управления планарным шаговым электродвигателем | 1987 |
|
SU1474768A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
