Изобретение относится к электротехнике, в частности к пленарным шаговым электроприводам, и может быть использовано в различных робототехнологических устройствах и станках.
Цель изобретения - повышение надежности,
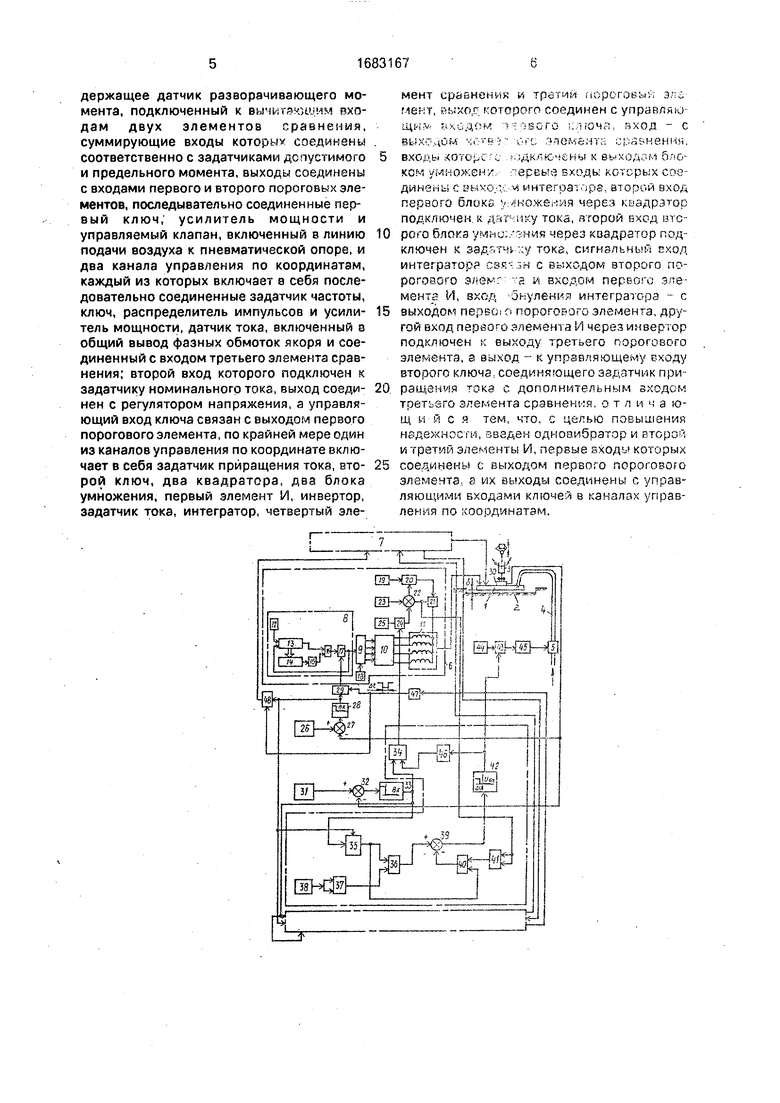
На чертеже представлена блок-схема электропривода.
Пленарный электродвигатель с пневмо- опорой (х.у-ШД) содержит подвижный якорь 1 и неподвижный индуктор 2. На якоре 1 установлен исполнительный механизм (манипулятор) 3. В зазор между якорем 1 и индуктором 2 подается воздух по эластичному шлангу 4 через управляемый клапан 5. Каждая из координат привода управляется по каналам 6 и 7 управления. Так, например, канал 6 состот из источника 8 управляющих импульсов, распределителя 9 импульсов,
усипител 10 мощности, сое/степного с фазным обмотками 1f, ксм-ооые находятся непосредственно на норе 1, х у ШД
Источник 8 лпавпяющич м пульсов со стоит из задачника 12 -исга шагов выход которого соединен с вводом прямого счета реверсивного счетчика 13 ьыходч которого -leoea поеобразозатель 1 л ког(- аналог(ПКл) связны с входом управляемо о генератор 15 импульсов (УГИ) Выход УГИ 15 соединен с из входов элемента И 15, второй 8хоц которого соединен с выходом оконча ния с1-ета на v- еньшенче реверсивного счстччк 13 Выход элеме та 15 соедппен через ключ 17 с входом распределителя 9 импульсов, к другому входу которого подключен задятчик 18 направления блок 1C соединен с регуляторов 20 напряжения, выход которого через датчик 21 тока соединен с фазными 11 Выход
сл
ВЗШХЙ
leasou
датчика 21 тока соединен с вычитающим входом третьего элемента 22 сравнения , первый суммирующий вход которого соединен с задатчиком 23 номинального тока, второй суммирующий вход через второй ключ 24 соединен с выходом задатчика 25 приращения тока. Задатчик 26 допустимого разворачивающего момента 26 соединен через первый элемент 27 сравнения с пер- рым пороговым элементом 28, выход которого через второй элемент И 29 соединен с ключом 17, Вычитающий вход элемента 27 Сравнения соединен с датчиком 30 момента. Задатчик 31 предельного момента через второй элемент 32 сравнения соединен с вторым пороговым элементом 33, выход которого соединен с одним из входов первого Элемента И 34 и с входом интегратора 35.
Вычитающий вход элемента 32 соединен с датчиком 30 разворачивающего момента. Вход сброса интегратора 35 Соединен с выходом порогового элемента 28. Выход интегратора 35 соединен с первым входом блока 36 умножения, второй вход которого через квадратор 37 соединен с задатчиком 38 тока. Выход блока 36 умножения соединен с суммирующим входом четвертого элемента 39 сравнения, вычитающий вход которого соединен с выходом блока 40 умножения, первый вход которого соединен с выходом интегратора 35, а второй через квадратор 41 - с выходом датчика 21 тока. Выход элемента 39 сравнения соединен через третий пороговый элемент 42 с ключом 43, вход которого соединен с задатчиком 44 зазора, а выход через усилитель 45 мощности - с управляемым клапаном 5. Выход порогового элемента 42 подключен через инвертор 46 к входу элемента 34, выход которого соединен с ключом 24.
Кроме того, вход одновибратора 47 соединен с выходом третьего порогового элемента 42, а его выход - с вторыми входами второго 29 и третьего 48 элементов И. Первые их входы соединены с выходом первого порогового элемента 28, а выходы - с управ- ляющими входами первых ключей в каналах 6 и 7 управления.
Устройство работает следующим образом.
Когда действующий на якорь 1 со стороны манипулятора 3 разворачивающий момент меньше, чем момент, задаваемый задатчиком 26, импульсы 8 источника, частота которых пропорциональна числу импульсов, поданных на вход прямого счета реверсивного счетчика 13, проходят через распределитель 9 и усилитель 10 мощности на фазные обмотки 11 х,у-ШД, Якорь 1 с манипулятором 3 совершает движение в направлении, определяемом задатчиком 18. Как только разворачивающий момент, определяемый датчиком 30, станет больше заданного задатчиком 26, подача импульсов
управления запрещается ключом 17. Если разворачивающий момент продолжает нарастать, то, как только он станет больше предельного, установленного задатчиком 31, ключ 24 замыкается и к установленному
задатчиком 23 значению тока задатчиком 25 прибавляется опреде;i чная величина тока, составляющая часть номинального тока фазы. В результате этого ток в фазах увеличивается, что повышает устойчивость якоря к
развороту. Когда разность сигналов на входах элемента 39 сравнения превысит порог срабатывания, ключ 24 разомкнется, уменьшая сигнал на задание тока в фазах, а также размыкается ключ 43, отключая управляемыи клапан 5. В результате якорь 1 надежно фиксируется на индукторе2. Когда внешний момент уменьшается до момента, установленного задатчиком 31, на вход интегратора 35 поступает нулевой сигнал, но на его выходе сигнал остается и управляемый клапан 5 по-прежнему отключен, Затем, когда внешний момент становится меньше установленного задатчиком 26, интегратор 35 по
сигналу с выхода первого порогового элемента 28 обнуляется. На выходе элемента 39 сравнения устанавливается нулевой сигнал, ключ 43 замыкается, клапан 5 включаете возобновляя подачу воздуха в
пространство между якорем 1 и индуктором 2. Ключ 17 остается разомкнутым на время At, определяемое одновибратором 47, который срабатывает по заднему фронту выходного сигнала порогового элемента 42.
Время задержки At должно быть минимально возможным, но достаточным для установления необходимого воздушного зазора. По окончанию времени At ключ 17 замыкается, разрешая подачу управляющих
импульсов на фазные обмотки х,у-ШД, прерванное движение возобновляется до тех пор, пока привод не отработает оставшееся в счетчике 13 число шагов.
Работа канала привода по другой координате аналогична.
Задержка подачи импульсов до установления воздушного зазора исключает прохождение импульсов при заторможенном якоре, что привело бы к ошибке в отработке
заданного перемещения.
Формула изобретен и я Планарный шаговый электропривод, включающий пленарный шаговый электродвигатель с пневмоопорой между якорем и индуктором и устройство управления, содержащее датчик разворачивающего момента, подключенный к вымигяч о. ич входам двух элементов сравнения, суммирующие входы которых соединены соответственно с задатчиками допустимого и предельного момента, выходы соединены с входами первого и второго пороговых элементов, последывательно соединенные первый ключ, усилитель мощности и управляемый клапан, включенный в линию подачи воздуха к пневматической опоре, и два канала управления по координатам, каждый из которых включает в себя последовательно соединенные задатчик частоты, ключ, распределитель импульсов и усилитель мощности, датчик тока, включенный в общий вывод фазных обмоток якоря и соединенный с входом третьего элемента сравнения; второй вход которого подключен к задатчику номинального тока, выход соединен с регулятором напряжения, а управляющий вход ключа связан с выходом первого порогового элемента, по крайней мере один из каналов управления по координате включает в себя задатчик приращения тока, второй ключ, два квадратора, два блока умножения, первый элемент И, инвертор, задатчик тока, интегратор, четвертый элемент сравнения трети ,к,регор:м; эг. ме т, №хог готорого соединен с управляю
. -Д ЗОГи чОЧГ ЧАОД - С
(.ь. ч, neive.-i, ,.,; зьненп 1
B.XOJb О1сг, w O&t-ibf к et VG, пб Г
«сом умножен/ есеь з входь. ко-.срых динеиь г УКУС - vs . jps втооои вход первого блс ка /-ночсе. мя через киадратос подключен к и - у тока, второй вход втс
0 рого бпркз , нич через квадрагор подключен к зад .т-ч / тока, сигнзлкныП пчод интегратор Ј н с выходом второго порогового а входом первоч; монта И, вход dt- nerfv интегратора - с
5 выходом nepsciг пороговогс элемента, другой вход переого пемен1а И черезимвер.ор подключен к выходу третоего порогового элемента, а - к управпяющему сходу второго ключа соединяющего зздатчик при
0 раииенмя ока с дополнительным входом элемента сравнения о т л и ч а ю- щ и 1 с о тем, что. с целью повышения нодехнгсш, сведен одновибратор и рторо . и третий элементы И, первые вход1-1 которых
5 соединены с выходом первого порогового элемента а их выходы соединены с управляющими входами ключей в каналах управления по координатам.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления планарным шаговым электродвигателем | 1988 |
|
SU1601732A1 |
| Планарный шаговый электропривод | 1988 |
|
SU1601733A1 |
| Способ управления планарным шаговым электродвигателем на воздушной опоре | 1987 |
|
SU1539953A1 |
| Электропривод переменного тока (его варианты) | 1984 |
|
SU1249686A1 |
| Устройство для настройки моментного вентильного электродвигателя | 1987 |
|
SU1661925A1 |
| Устройство для настройки моментного вентильного электродвигателя | 1987 |
|
SU1580495A1 |
| Электропривод | 1985 |
|
SU1332427A1 |
| Моментный вентильный электродвигатель с устройством для его настройки | 1987 |
|
SU1661926A1 |
| Устройство для настройки моментного вентильного электродвигателя | 1987 |
|
SU1515273A1 |
| Устройство для управления моментом синхронного двигателя | 1988 |
|
SU1527700A1 |
Изобретение относится к зпс аислехнч ке, з частности к плэнарныг.. им овь м эчек- трспривсдзм, и может быть i спэ ьзогано в различных робототехнологических устройствах и станках Цель изобретения состой в попирании надежности В г парном шаговом электроприводе ревизована кьмби- нированна фиксация якоре; s чду тору при действии на якорь звачитепьиого рэзчо- рачивзюи(8го момента песте устоаненич которого яхорь рзсфиксируют чадерживзч ГОДЗЧУ vnDasn souV ix импул - ов не время расфиксац.м 1 мл
| Ивоботекко Б А , Козаченко В.Ф | |||
| Шаговый электропривод в робототехнике | |||
| М,, МЭИ, 1984,с 72 | |||
| Авторское свидетельство СССР по заявке N 4499878, кл | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
