(Л
с
| название | год | авторы | номер документа |
|---|---|---|---|
| Планарный шаговый электропривод | 1989 |
|
SU1683167A1 |
| Планарный шаговый электропривод | 1988 |
|
SU1601733A1 |
| Способ управления планарным шаговым электродвигателем на воздушной опоре | 1987 |
|
SU1539953A1 |
| Адаптивная система регулирования объекта с нестационарной характеристикой,например,дуговой сталеплавильной печи | 1983 |
|
SU1068891A1 |
| Устройство для контроля степени развальцовки труб | 1982 |
|
SU1042849A1 |
| Адаптивная система управления | 1985 |
|
SU1361502A1 |
| Устройство для управления летучими ножницами сортопрокатных и трубных станов | 1976 |
|
SU656754A1 |
| Цифровая система для программного управления двигателем | 1986 |
|
SU1320793A1 |
| Электропривод постоянного тока | 1990 |
|
SU1774451A2 |
| Адаптивная система управления | 1984 |
|
SU1257607A1 |
Изобретение относится к электротехнике, в частности к управлению электрическими машинами, и может быть использовано для управления планарным шаговым электродвигателем в различных робототехнических установках и станках. Цель изобретения состоит в расширении эксплуатационных возможностей путем уменьшения числа остановок при превышении разворачивающего момента. По сигналу превышения допустимого момента увеличивается ток в фазах двигателя, а фиксация якоря производится, если через заданное время превышение разворачивающего момента над заданным предельным не будет устранено. 1 ил.
Изобретение относится к электротехнике, в частности к управлению электрическими машинами, и может быть использовано для управления планерным шаговым электродвигателем, например, в различных робототехнологических устройствах и станках.
Целью изобретения является расширение эксплуатационных возможностей путем уменьшения числа остановок при превышении допустимого разворачивающего момен- та.
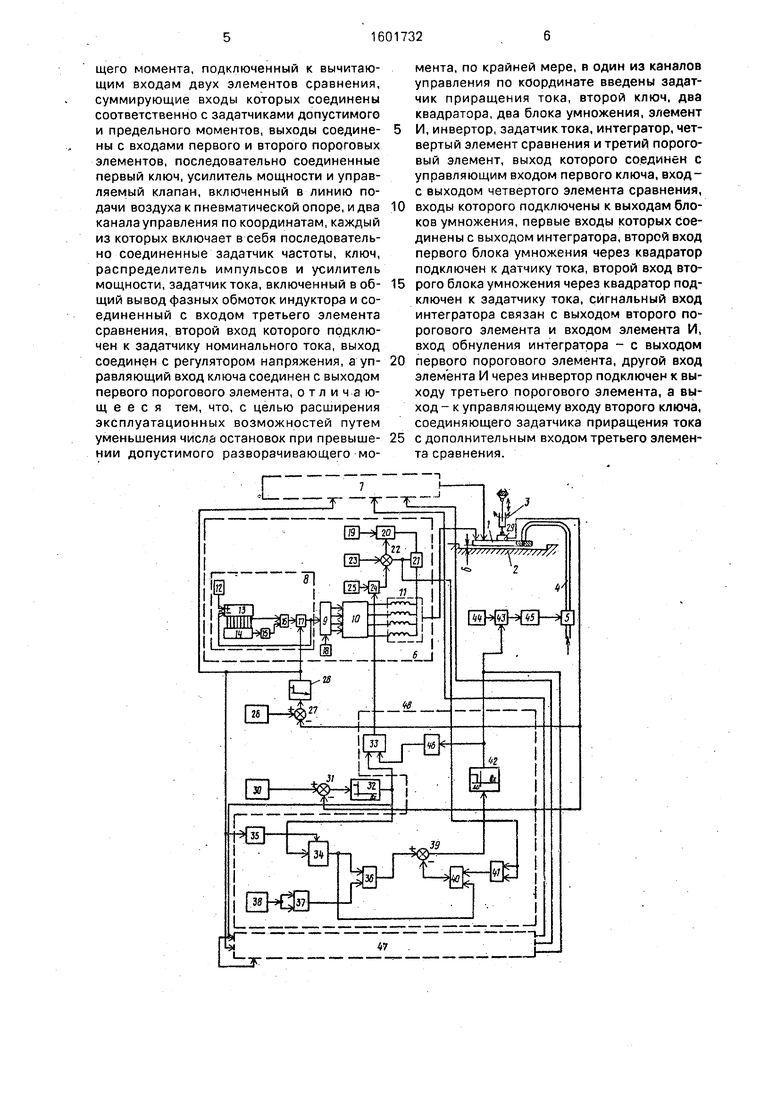
На чертеже представлена блок-схема устройства для управления планарным шаговым электродвигателем (ШД).
ШД состоит из подвижного якоря 1 и неподвижного индуктора 2. На якорь установлен механизм 3 (манипулятор). Сжатый воздух пневмосети подается по гибкому эластичному шлангу 4 через управляемый клапан 5. Каждая из координат привода управляется по одному из каналов 6 и 7. Канал
6 состоит из источника 8 управляющих импульсов, распределителя 9 импульсов, усилителя 10 мощности, каждый канал которого соединен с одной из фазных обмоток 11. которые находятся непосредственно на якоре 1 ШД. Источник 8 управляющих импульсов в свою очередь состоит из задатчика 12 шагов, выход которого соединен с входом прямого счета реверсивного счетчика 13, выходы которого через преобразователь код- аналог(ПКА) 14 связаны с входом управляемого генератора импульсов (УГЙ) 15, частота выходных импульсов которого пропорциональна числу импульсов, поданных на вход прямого счета, т.е. пропорциональна величине перемещения.
Выход УГИ соединен с одним из входов элемента И 16, второй вход которого соединен с нулевым разрядом реверсивного счетчика 13. Выход элемента 16 соединяется через ключ 17 с входом распределителя 9
сь о
импульсов. Устройство также содержит за- датчик 18 направления и блок 19 питания регулятора 20 напряжения, Его выход через датчик 21 тока соединен с фазными обмотками, Выход датчика 21 тока соединен с вычитающим входом третьего элемента 22 сравнения, первый суммирующий вход которого соединен с задатчиком 23 номинального тока, а второй суммирующий вход через второй ключ 24 соединен с выходом задатчика 25 приращения тока, Задатчик 26 допустимого по условию движения разворачивающего момента соединен через первый элемент 27 сравнения с первым пороговым элементом 28, выход которого соединен с ключом 17.
Вычитающий вход элемента 27 сравнения соединен с датчиком 29 момента. Задатчик 30 предельного момента через второй элемент 31 сравнения соединен с вторым пороговым элементом 32, выход которого соединен с одним из входов элемента И 33 и с входом интегратора 34. Вычитающий вход элемента 31 соединен с датчиком 29 разворачивающего момента. Вход сбросу ийтегратора 34 в нуль соединен через ключ 35 с выходо м порогового элемента 28. Выход интегратора 34 соединен с первым входом блока 36 умножения, второй вход которого через квадратор 37 соединен с за- датчмком 38 тока.
Выход блока 36 умножения соединен с суммирующим входом четвертого элемента 39 сравнения, вычитающий вход которого соединен с выходом блока 40 умножения, первый вход которого соединен с выходом интегратора 34, а второй через квадратор 41 соединен с выходом датчика 21 тока. Выход элемента 39 сравнения соединен через третий пороговый элемент 42 с ключом 43, его сигнальный вход соединен с задатчиком 44 зазора, а выход соединен через усилитель 45 мощности с управляемым клапаном 5. Кроме этого, выход порогового элемента 42 соединен через инвертор 46 с входом элемента И 33, выход которого соединен с ключом 24, При организации защиты от разворота якоря с помощью кратковременного увеличения тока в обмотках и по второму каналу 7 управления s него вводится блок 47, аналогичный по структуре с блоком 48 первого канала 6 управления.
Устройство работает следующим образом.
Когда действующий на якорь 1 со стороны манипулятора 3 разворачивающий момент меньше, чем момент, задаваемый задатчиком 26, импульсы источника 8 проходят через распределитель 9 и усилитель 10 мощности на фазные обмотки 11 ШД,
Якорь 1 с манипулятором 3 совершает движение в направлении, определяемом задатчиком 18. Как только разворачивающий момент, определяемый датчиком 29, станет
больше заданного блоком 26, подача импульсов управления ключом 17 запрещается. Если разворачивающий момент продолжает нарастать, то, как только он станет больше предельного, установленного
0 задатчиком 30, ключ 24 замыкается и к установленному задатчиком 23 значению тока задатчиком 25 прибавляется определенная величина тока, составляющая долю номинального тока фазы. В результате этого ток
5 в фазах увеличивается, что повышает устойчивость якоря к развороту. При этом, как только разность напряжений на блоке 39 сравнения становится больше порога срабатывания порогового элемента 42, ключ 24
0 размыкается, уменьшая сигнал на задание тока в фазах, а также размыкается ключ 43, отключая управляемый клапан 5.
В результате якорь 1 надежно фиксируется на индукторе 2. Как только внешний
5 момент уменьшается до момента, установленного задатчиком 30, на вход интегратора 34 поступает нулевой сигнал, но на его выходе сигнал остается и управляемый клапан 5 по-прежнему отключен. Затем, как только
0 внешний момент становится меньше установленного задатчиком 26, интегратор 34 обнуляется через ключ 34, на выходе элемента 39 сравнения устанавливается нулевой сигнал, ключ 43 замыкается, клапан 5
5 включается, возобновляя подачу воздуха в пространство между якорем 1 и индуктором 2, ключ 17 замыкается, подача управляющих импульсов на обмотки ШД восстанавливается и якорь 1 продолжает прерванное дви0 жение.
Работа канала привода по другой координате аналогична. Значения моментов у- задатчиков лучше определить экспериментально и задать их соответствующим уров5 нем напряжения.
В предлагаемом устройстве управления планарным шаговым электродвигателем реализована комбинированная фиксация якоря к индуктору, благодаря ко0 торой надежность устройств, создаваемых на базе таких электроприводов, улучшается. Кроме этого, уменьшается число вынужденных фиксаций, что повышает производительность таких установок и облегчает
5 условия работы пневмосети.
Формул а и зобретения
Устройство для управления планарным
шаговым электродвигателем, индуктор и
якорь которого образуют пневматическую
опору, содержащее датчик разворачивающего момента, подключенный к вычитающим входам двух элементов сравнения, суммирующие входы которых соединены соответственно с задатчиками допустимого и предельного моментов, выходы соедине- ны с входами первого и второго пороговых элементов, последовательно соединенные первый ключ, усилитель мощности и управляемый клапан, включенный в линию подачи воздуха к пневматической опоре, и два канала управления по координатам, каждый из которых включает в себя последовательно соединенные задатчик частоты, ключ, распределитель импульсов и усилитель мощности, задатчик тока, включенный в об- щий вывод фазных обмоток индуктора и соединенный с входом третьего элемента сравнения, второй вход которого подключен к задатчику номинального тока, выход соединен с регулятором напряжения, а уп- равляющий вход ключа соединен с выходом первого порогового элемента, отличающееся тем, что, с целью расширения эксплуатационных возможностей путем уменьшения числа остановок при превыше- НИИ допустимого разворачивающего момента, по крайней мере, в один из каналов управления по координате введены задатчик приращения тока, второй ключ, два квадратора, два блока умножения, элемент И, инвертор, задатчик тока, интегратор, четвертый элемент сравнения и третий пороговый элемент, выход которого соединен с управляющим входом первого ключа, вход- с выходом четвертого элемента сравнения, входы которого подключены к выходам блоков умножения, первые входы которых Соединены с выходом интегратора, второй вход первого блока умножения через квадратор подключен к датчику тока, второй вход второго блока умножения через квадратор подключен к задатчику тока, сигнальный вход интегратора связан с выходом второго порогового элемента и входом элемента И, вход обнуления интегратора - с выходом первого порогового элемента, другой вход элемента И через инвертор подключен к выходу третьего порогового элемента, а выход - к управляющему входу второго ключа, соединяющего задатчика приращения тока с дополнительным входом третьего элемента сравнения.
JL..
| Ивоботенко Б.А., Козаченко В.Ф | |||
| Шаговый электропривод в робототехнике.- М.: МЭИ, 1984, с | |||
| Веникодробильный станок | 1921 |
|
SU53A1 |
| Устройство для управления планарным шаговым электродвигателем | 1987 |
|
SU1474768A1 |
| кл | |||
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
