Изобретение относится к электротехнике, в частности, к планарным шаговым электроприводам, и может быть использовано в различных технологических установках.
Цель изобретения - повышение производительности.
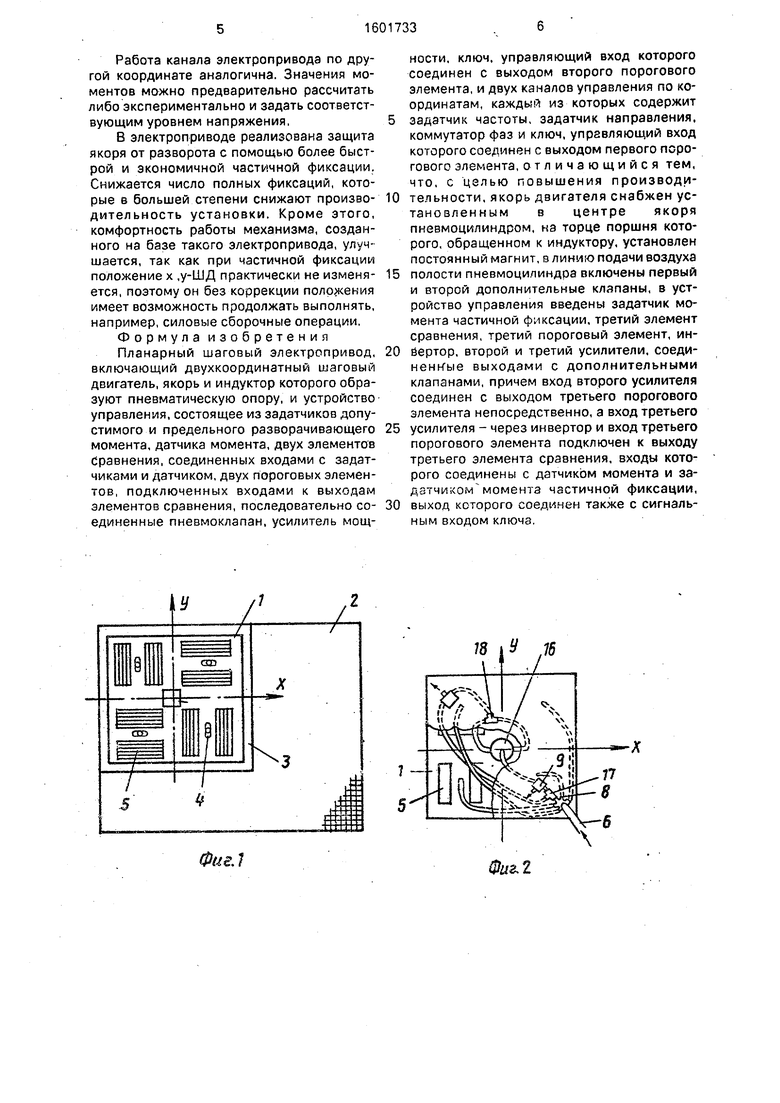
На фиг.1 изображен планарный шаговый электродвигатель (х ,у-ШД) с перевернутым якорем; на фиг.2 - якорь со схематичным изображением пневмовходов; на фиг.З - узел для частичной фиксации; на фиг.4 - устройство для управления х ,у-ШД.
Планарный шаговый электродвигатель состоит из подвижного якоря 1 и неподвижного индуктора 2. По периметру нижних кромок якоря выполнен скос 3. Якорь, имеющий для выхода сжатого воздуха отверстия 4, скомпонован из зубчатых модулей 5, представляющих собой электромагниты. Сжатый воздух из пневмосети (или индивидуального компрессора) подается на якорь 1 по гибкому пневмоприводу 6 через управляемый клапан 7. Проходя через распределитель 8, поток сжатого воздуха разделяется и по элементарным пневмопроводам, находящимся на якоре 1 (фиг.2), поступает через отверстия 4, обеспечивая между якорем и индуктором необходимый воздушный зазор д. На якоре 1 установлены два дополнительных управляемых клапана 9 и 10. Первый обеспечивает частичную фиксацию якоря х,у- ШД, а второй обеспечивает освобождение от нее при возобновлении прерванного движения.
Для реализации частичной фиксации на якоре X ,у-ШД выполнено сквозное окно 11, в которое может выдвигаться подвижный элемент 12 (шток поршня) с постоянным магнитом 13. Подвижный эле.мент, удерживаемый сжатым воздухом пневмоопоры, жестко с якорем 1 не связан, а установлен в специальном цилиндре 14, жестко закрепленном на якоре 1. Для улучшения работы верхняя часть 15 подвижного элемента (поршня) должна быть по площади больше площади выходного окна 11. Для смягчения возможных ударов при подъеме поршня между крышкой 16 и поршнем 15 можно
c о
ч
со
СА)
(предусмотреть амортизирующие проклад- |ки. Сжатый воздух к управляемым клапанам 9 и 10 поступает через распределитель 17, а в зону для поддержания поршня - через распределитель 18, Известные управляемые клапаны имеют три входа-выхода, причем, если по катушке электромагнита внутри клапана ток не протекает, то между собою соединены входы-выходы а-с, а если электромагнит включен, то между собою соединены входы-выходы а-Ь, Соответственно, в первом случае закрыт выход Ь, а во втором - с.
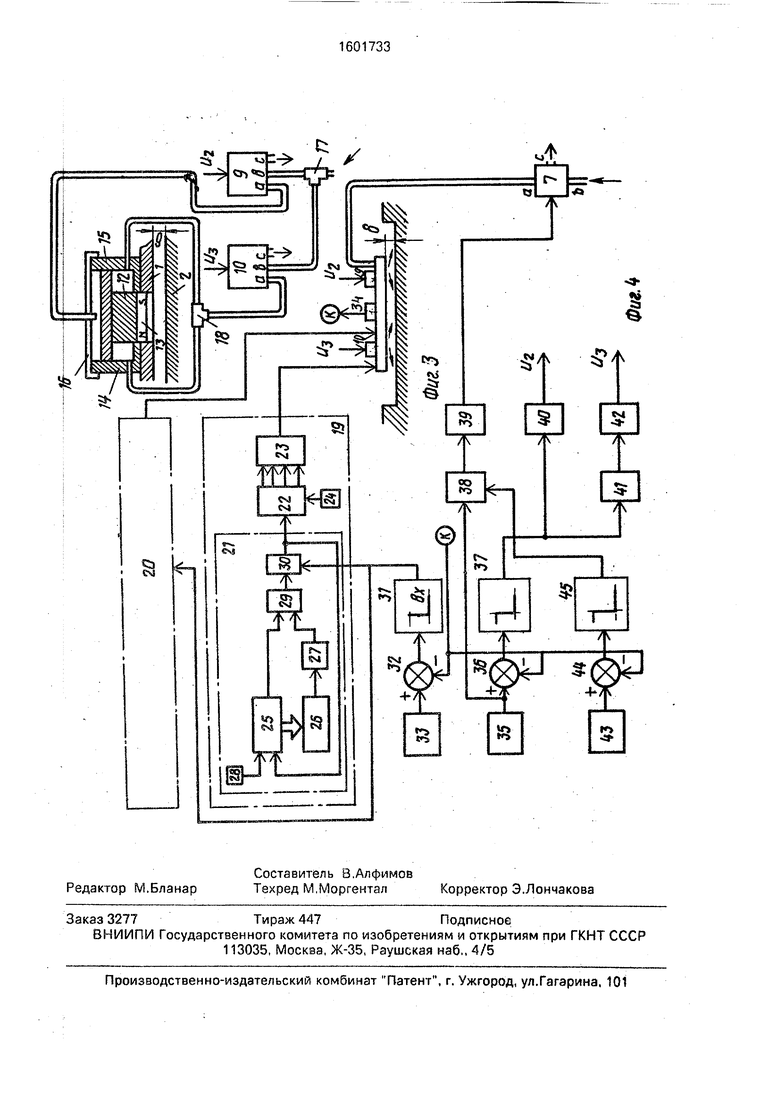
Для управления таким двигателем (фиг.4) представлено устройство управления. Каждая из декартовых координат привода управляется по одинаковым каналам 19 и 20, Например, канал 19 состоит из источника 21 управляющих импульсов, распределителя 22 импульсов, усилителя 23 мощности, соединенного с фазными обмотками якоря 1 (обмотки не показаны), задат- чика 24 направления движения, Источник 21, например, состоит из реверсивного счетчика 25, выходы которого через преобразователь код-аналог (ПКА) 26 связан с входом управляемого генератора 27 импульсов (УГИ), частота выходных импульсов которого пропорциональна числу входных импульсов, поданных на вход счетчика 28 - задатчик числа шагов. Выход генератора 27 соединен с одним из входов элемента И 29, на втором вход которого поступает сигнал с нулевого разряда счетчика 25. Выход элемента 29 через ключ 30 соединен с-входом распределителя 22 импульсов и с вычитающим входом счетчика 25. Ключ 30 соединен с выходом порогового элемента 31, вход которого соединен с выходом первого элемента 32 сравнения, суммирующий вход которого соединен с задатчиком 33 допустимого разворачивающего момента, а вычитающий вход соединен с датчиком 34 момента,
Датчик момента установлен на якоре 1, на котором также располагается механизм, например манипулятор (не показан). Выход задатчика 35 предельного момента полной фиксаций подключен к суммирующему входу второго элемента 36 сравнения, а через ключ 38 и усилитель 39 подключен к управляемому клапану 7. Вычитающий вход элемента 36 соединен с выходом датчика 34 моменте, а выход соединен с вторым пороговым элементом 37. Его выход через усилитель 40 соединен с клапаном 9, а через инвертор 41 и усилитель 42 соединен с клапаном 10. Задатчик 43 момента частичной фиксации через третий элемент 44 сравнения и третий пороговый элемент 45 соединен с ключом 38. Момент, обеспечиваемый частичной фиксацией, должен быть больше, чем максимальный синхронизирующий момент х,у-ШД, что выполнимо, так как нор- мальные силы значительно больше тангенциальных.
Планарный шаговый электропривод работает следующим образом. 0 Когда действующий на якорь 1 разворачивающий момент меньше допустимого по условию движения и заданный задатчиком 33, то управляющие импульсы от источника 21 проходят через распределитель 22 им- 5 пульсов и усилитель 23 мощности на фазные обмотки, х,у-ШД. В зависимости от заданного задатчиком 24 направления движения якорь с механизмом совершает необходимые пер€ мещения. Как только разворачива- 0 ющий момент от датчика 34 станет больше чем момент, заданный задатчиком 33, то на выходе порогового элемента 31 формируется сигнал, которым ключ 30 размыкается, подача импульсов на распределитель 22 5 прекращается, а в счетчике 25 остается число, которое соответствует оставшемуся пути. С момента времени, когда разворачивающий момент станет больше момента, за- даваемого задатчиком 35, клапан 9 30 включается, а клапан 10, напротив, отключается. При этом сжатый воздух через клапан 9 подается в полость цилиндра над поршнем 15, а нижняя полость под поршнем через входы-выходы клапана 10 соединяется 35 с атмосферой.
В результате поршень приходит в движение, жестко фиксируется магнитом 13 на индукторе 2 и предотвращает разворот якоря 1. Если разворачивающий момент со 40 стороны механизма станет столь значительным, что превысит заданный задатчиком 43, то ключом 38 запрещается прохождение сигнала от задатчика 35 на управляемый клапан 7. В результате подача воздуха к 45 якорю 1 прекращается и осуществляется полная фиксация. Как только внешний разворачивающий момент вновь станет меньше, чем заданный задатчиком 43, то через клапан 7 сжатый воздух к якорю подается 50 вновь. После того, когда внешний момент станет меньше заданного задатчиком 35, клапаны 9 и 10 переключаются, в результате чего частичная фиксация снимается, С момента времени, когда разворачивающий мо- 55 мент станет меньше заданного блоком 33, ключ 30 разрешает подачу управляющих импульсов и якорь 1 продолжает прерванное движение до тех пор, пока привод не отработает оставшееся в счетчике 25 число шагов.
Работа канала электропривода по другой координате аналогична. Значения моментов можно предварительно рассчитать либо экспериментально и задать соответствующим уровнем напряжения.
В электроприводе реализована защита якоря от разворота с помощью более быстрой и экономичной частичной фиксации. Снижается число полных фиксаций, которые в большей степени снижают произво- дительность установки. Кроме этого, комфортность работы механизма, созданного на базе такого электропривода, улучшается, так как при частичной фиксации положение х ,у-ШД практически не изменя- ется, поэтому он без коррекции положения имеет возможность продолжать выполнять, например, силовые сборочные операции,
Формула изобретения
Планарный шаговый электропривод, включающий двухкоординатный шаговый двигатель, якорь и индуктор которого образуют пневматическую опору, и устройство управления, состоящее из задатчиков допустимого и предельного разворачивающего момента, датчика момента, двух элементов Сравнения, соединенных входами с задат- чиками и датчиком, двух пороговых элементов, подключенных входами к выходам элементов сравнения, последовательно со- единенные пневмоклапан, усилитель мощности, ключ, управляющий вход которого соединен с выходом второго порогового элемента, и двух каналов управления по координатам, каждый из которых содержит задатчик частоты, задатчик направления. коммутатор фаз и ключ, управляющий вход которого соединен с выходом первого порогового элемента, отличающийся тем, что, с целью повышения производительности, якорь двигателя снабжен установленным в центре якоря пневмоцилиндром, на торце поршня которого, обращенном к индуктору, установлен постоянный магнит, в линию подачи воздуха полости пневмоцилиндра включены первый и второй дополнительные клапаны, в устройство управления введены задатчик момента частичной фиксации, третий элемент сравнения, третий пороговый элемент, инвертор, второй и третий усилители, соеди- нени ые выходами с дополнительными клапанами, причем вход второго усилителя соединен с выходом третьего порогового элемента непосредственно, а вход третьего усилителя - через инвертор и вход третьего порогового элемента подключен к выходу третьего элемента сравнения, входы которого соединены с датчиком момента и за- датчиком момента частичной фиксации, выход которого соединен также с сигнальным входом ключа.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для управления планарным шаговым электродвигателем | 1988 |
|
SU1601732A1 |
| Планарный шаговый электропривод | 1989 |
|
SU1683167A1 |
| Способ управления планарным шаговым электродвигателем на воздушной опоре | 1987 |
|
SU1539953A1 |
| Устройство для программного управления шаговым двигателем | 1985 |
|
SU1314312A1 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ ШАГОВЫМ ДВИГАТЕЛЕМ | 2007 |
|
RU2329588C1 |
| Устройство для управления шаговым двигателем | 1985 |
|
SU1541560A1 |
| Установка для испытаний и калибровки линейного шагового двигателя | 1988 |
|
SU1541753A1 |
| Устройство для перемещения и колебаний сварочной горелки | 1988 |
|
SU1547995A1 |
| СПОСОБ КОНТРОЛЯ РАБОТЫ ЭЛЕКТРОПРИВОДА НА ОСНОВЕ ДВУХОБМОТОЧНОГО ШАГОВОГО ДВИГАТЕЛЯ, РАБОТАЮЩЕГО В ПОЛНОШАГОВОМ РЕЖИМЕ, И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2021 |
|
RU2774923C1 |
| ШАГОВЫЙ ЭЛЕКТРОПРИВОД | 1988 |
|
RU2076451C1 |
Изобретение относится к электротехнике, в частности к планарным шаговым электродвигателям и устройствам для управления ими, может быть использовано в технологических установках различного назначения. Цель изобретения состоит в повышении производительности. Предложен планарный шаговый электропривод, в котором для защиты от разворота якоря используется частичная фиксация. Благодаря этому уменьшается число вынужденных и менее экономичных полных фиксаций якоря к индуктору. 4 ил.
Фиё, 1
| Двухкоординатный шаговый электродвигатель | 1975 |
|
SU577616A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Устройство для управления планарным шаговым электродвигателем | 1987 |
|
SU1474768A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
