NTVV4 ХЧЧ XV4 ХЧ ХЧ VOs ХЧЛ Ч XV4 NNN/NNN Ч VV4
Ч/N44/
7 I
Фаг.1
Фаг.1
Изобретение относится к машиностроению и может быть испопьзовано при проектировании различного рода манипу.гГяционных и спутниковых систем, координатных столов и т.д.
Цель изобретения - снижение энергозатрат за счет аккумулирования механической энергии звеньев.
На фиг. 1 изображена схема устройства; на фиг. 2 - узел I на фиг. 1; на фиг. 3 - схема многозвенного устройства .
Устройство содержит основание 1, на котором с возможностью перемеще- ния вдоль него установлены звенья 2 и 3, связанные между собой упругим элементом 4, например пружиной, На каждом подвижном звене установлена подвижная часть 5 фиксаторов, связанная с выходным элементом двигателя, выполненного, например, в виде электромагнита 6. На основании 1 установлена вторая часть фиксаторов, например рейка 7, с равноотстоящими на шаг t прорезями 8, Части 5 фиксаторов установлены с возможностью взаимодействия своими рабочими поверхностями с поверхностями прорезей 8. Фиксатс- ры связаны с блоком 9 упрявлапия посредством датчиков 10- По крейчсл мере одна из поверхностей np- oe-ses 8 составляет с направлением . щения подвижного зве/а угол е-ч мс.ше 90°, но больше, чем угол самотор.чс- жания.
Если это условие не 0}дет соблюдено, то конструкция будет по- собной, так как произойдет заклинивание элементов фиксатора. Ширина прорези на рейке 7 выбирается из соотно- шения
ct
8
С(я
2
где
W t С
1 -
потери энергии за один шаг; длина шага;
суммарная жесткость задействованных на шаг упругих элементов;
ширина прорезей. При несоблюдении указанного условия часть 5 фиксатора, установленная на подвижном звене не попадает в прорезь и не произойдет фиксации и восполнения диссепативной энергии
Устройство работает следующим образом.
В исходном положении звенья 2 и 3 зафиксированы относительно друг дру
га при помощи частей фиксаторов. Изменение шагового перемещения звеньев производится путем смены порядка чередования расфиксации звеньев с учетом упругого состояния пружины. Если необходимо перемещать систему на шаг слева направо, то с блока управления подается команда на расфиксацию звена 2. Под действием упругого элемента 4 звено 2 начнет перемещаться в направлении звена 3 до тех пор, пока вся потенциальная энергия растяжения пружины не перейдет в потенциальную энергию сжатия. Часть 5 фиксатора доходит до начала прорези и датчик 10 дает сигнал на блок 9 управления о наличии прорези и включении электромагнита, который выдвигает часть Ь фиксатора,, который своей рабочей поверхностью скользит по рабочей поверхности прорези, принудитеть о заходит з нее, перемещая подвижное чьепо на величину Д , тем самым восполняя потери потенциальной энергии пружины. Таким образом, потери энергии при перемещении звена компенсируются без дополнительного привода. При перемещении лю- из звеньев с ним необходимо произвести аналогичные действия. Переме- шеоие звена происходит при фиксирование положении соседних с ним звень- гз.
Формула изобретения
1 о Устройство для перемещения рабочего органа, содержащее установленные на основании направляющие элементы, на которых расположены звенья, связанные с рабочим органом, приводы перемещения звеньев и фиксаторы положения звеньев, состоящие из неподвижной, имеющей клиновые прорези части, установленной на основании, и подвижных частей, установленных на каждом из звеньев с возможностью их взаимодействия с прорезями неподвиж ной части5 отличающееся тем, что, с целью снижения энергозатрат за счет аккумулирования механической энергии звеньев, оно снабжено упругими элементами (, установленными между звеньями, а привод перемещения каждого из звеньев выполнен в виде двигателя, установленного на звене и связанного с подвижной частью фиксатора, при этом по крайней мере одна
51541043
из поверхностей прорезей неподвижной
части фиксатора составляет с направлением перемещения звеньев угол, меньший 90 , но больший, чем угол самоторможения звена.
2„ Устройство по п.1, о т л и - чающееся тем, что неподвижная часть фиксатора выполнена в виде рейки с равноотстоящими одна от другой прорезями.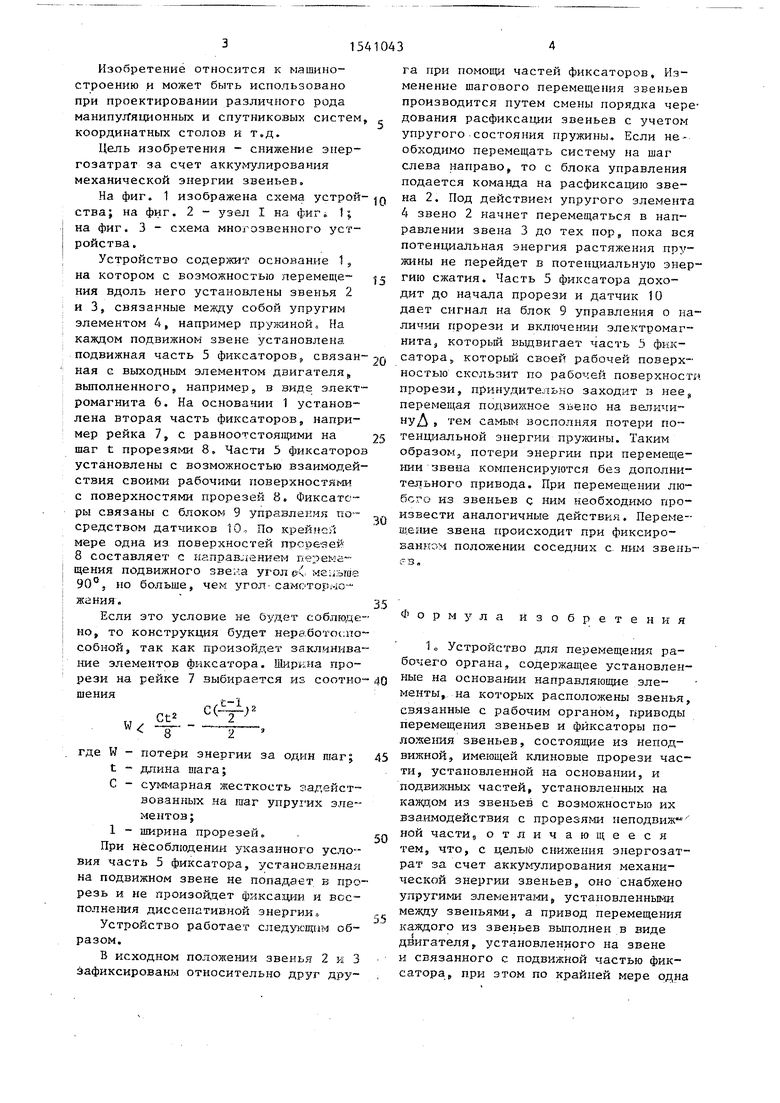
| название | год | авторы | номер документа |
|---|---|---|---|
| Модуль промышленного робота | 1986 |
|
SU1399110A1 |
| РЕЗОНАНСНЫЙ ПРИВОД | 1999 |
|
RU2162791C2 |
| Способ управления резонансной механической рукой | 1985 |
|
SU1346419A1 |
| КОЛЕННЫЙ УЗЕЛ ПРОТЕЗА НИЖНЕЙ КОНЕЧНОСТИ | 1994 |
|
RU2077875C1 |
| Привод линейного перемещения исполнительного механизма | 1989 |
|
SU1662838A1 |
| МЕХАНИЧЕСКАЯ РУКА | 1993 |
|
RU2065354C1 |
| Резонансный привод | 1986 |
|
SU1357219A1 |
| ПРОТЕЗ БЕДРА | 1990 |
|
RU2019155C1 |
| Модуль манипулятора | 1987 |
|
SU1466934A1 |
| ПРОТЕЗ БЕДРА | 1992 |
|
RU2043091C1 |

Изобретение относится к машиностроению и может быть использовано при проектировании различного рода манипуляционных и спутниковых систем, координатных столов и т.д. Целью изобретения является снижение энергозатрат за счет аккумулирования механической энергии звеньев. Перемещение исполнительного органа, связанного со звеньями 2 и 3, происходит в шаговом режиме путем смены порядка чередования расфиксации и фиксации звеньев под действием упругого элемента 4, расположенного между одними звеньями, и усилия, возникающего при взаимодействии подвижной части 5 фиксатора звена с накладной поверхностью прорези 8, выполненной на неподвижной части 7 фиксатора, которое компенсирует потери энергии, возникающие при перемещении звена. 1 з.п. ф-лы. 3 ил.
ч-
Фиг. 2
1
/w
т
Риг.З
| Электромагнитный линейный двигатель | 1981 |
|
SU957366A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
