(Л
с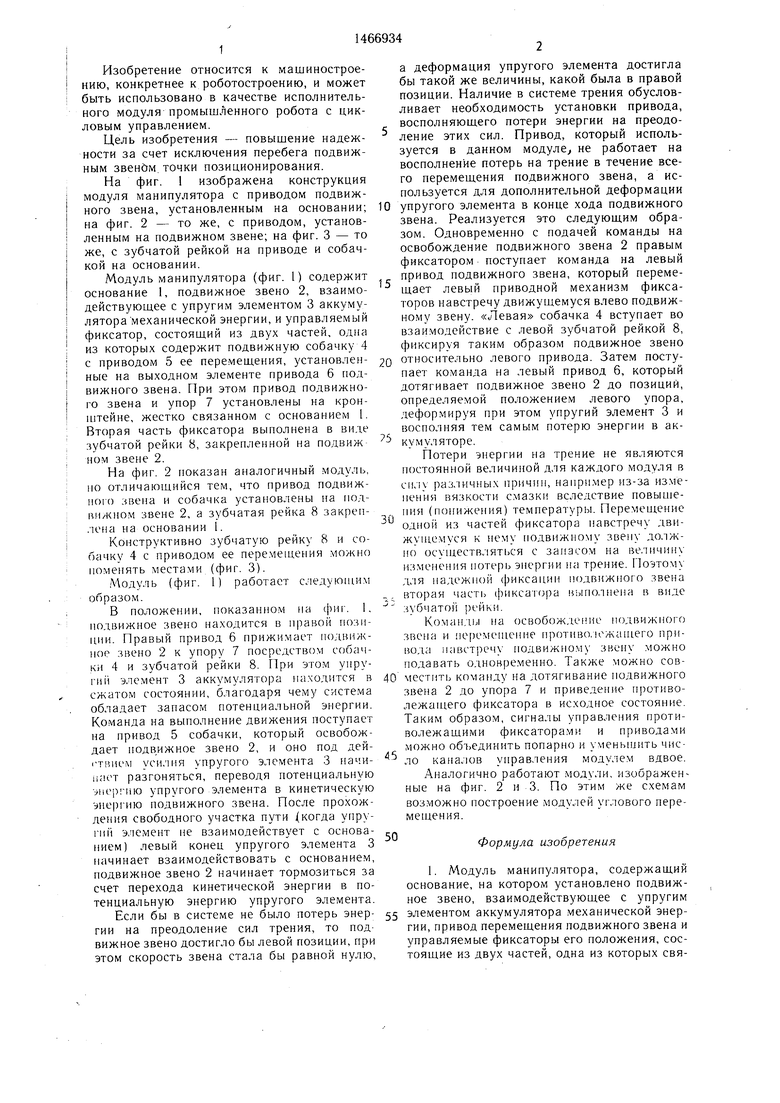
| название | год | авторы | номер документа |
|---|---|---|---|
| Модуль манипулятора | 1991 |
|
SU1799725A1 |
| Модуль манипулятора | 1991 |
|
SU1798177A1 |
| Модуль вертикального перемещения | 1986 |
|
SU1386444A1 |
| Делительное устройство | 1981 |
|
SU1000233A1 |
| Устройство для подачи материала в зону обработки | 1986 |
|
SU1391782A1 |
| ХИРУРГИЧЕСКИЙ СШИВАЮЩИЙ АППАРАТ С ОТВОДНЫМ ВЫСТРЕЛИВАНИЕМ | 2009 |
|
RU2493789C2 |
| МАГНИТОПРУЖИННЫЙ ПРИВОД | 2006 |
|
RU2312781C1 |
| Модуль вертикального перемещения | 1984 |
|
SU1229032A1 |
| ХИРУРГИЧЕСКИЙ СШИВАЮЩИЙ АППАРАТ С БЛОКИРУЕМОЙ СИСТЕМОЙ ВЫСТРЕЛИВАНИЯ | 2009 |
|
RU2492820C2 |
| Устройство для маркировки изделий | 1972 |
|
SU477758A1 |
Изобретение относится к машиностроению, конкретнее к роботостроению, и может быть использовано в качестве исполнительного модуля промышленного робота с цикловым управлением. Целью изобретения является повышение надежности за счет исключения перебега подвижного звена в точке позиционирования. На подвижном звене 2 закреплена одна из частей фиксатора, представляющая собой зубчатую рейку 8. В исходном положении подвижное звено 2 находится в правой программной позиции. Правый привод 6 прижимает подвижное звено 2 к упору 7 посредством собачки 4, взаимодействующей с зубчатой рейкой 8. Упругий элемент 3 находится в сжатом состоянии, система обладает запасом потенциальной энергии. После освобождения подвижного звена 2, оно под действием элемента 3 разгоняется и после прохождения свободного участка пути левый конец упругого элемента 3 взаимодействует с основанием и подвижное звено 2 тормозится за счет перехода кинетической энергии в потенциальную энергию упругого элемента 3. 3 з.п.ф-лы. 3 ил. f
7 7
/ /////(/////л
; 2 7
/Л7///Л /,
05 05
со
ОО
ФиеЛ
5
Изобретение относится к машиностроению, конкретнее к роботостроению, и может быть использовано в качестве исполнительного модуля промышленного робота с цикловым управлением.
Цель изобретения - повышение надежности за счет исключения перебега подвижным звенСгм. точки позиционирования.
На фиг. 1 изображена конструкция модуля манипулятора с приводом подвижа деформация упругого элемента достигла бы такой же величины, какой была в правой позиции. Наличие в системе трения обусловливает необходимость установки привода, восполняюшего потери энергии на преодо- ление этих сил. Привод, который используется в данном мoдyлe не работает на восполнение потерь на трение в течение всего перемешения подвижного звена, а используется для дополнительной деформации
ного звена установленным на основании; 10 упругого элемента в конце хода подвижного на фиг 2 - то же, с приводом, установ- звена. Реализуется это следуюш,им обра зом. Одновременно с подачей команды на
освобождение подвижного звена 2 правым
фиксатором поступает команда на левый
действующее с упругим элементом 3 аккумулятора механической энергии, и управляемый фиксатор, состоящий из двух частей, одна из которых содержит подвижную собачку 4
75
30
ленным на подвижном звене; на фиг. 3 - то же, с зубчатой рейкой на приводе и собачкой на основании...Модуль манипулятора (фиг. 1) содержит привод подвижного звена, который переме- основание 1, подвижное звено 2, взаимо- щает левый приводной механизм фиксаторов навстречу движущемуся влево подвижному звену. «Левая собачка 4 вступает во взаимодействие с левой зубчатой рейкой 8, фиксируя таким образом подвижное звено
с приво дом 5 её перемещения установлен- 20 относительно левого пр ивода. Затем посту- ные на выходном элементе привода 6 под- пает команда на левый привод 6, который вижного звена. При этом привод подвижного звена и упор 7 установлены на кронштейне, жестко связанном с основанием 1. Вторая часть фиксатора выполнена в виде зубчатой рейки 8, закрепленной на подвиж ном звене 2.
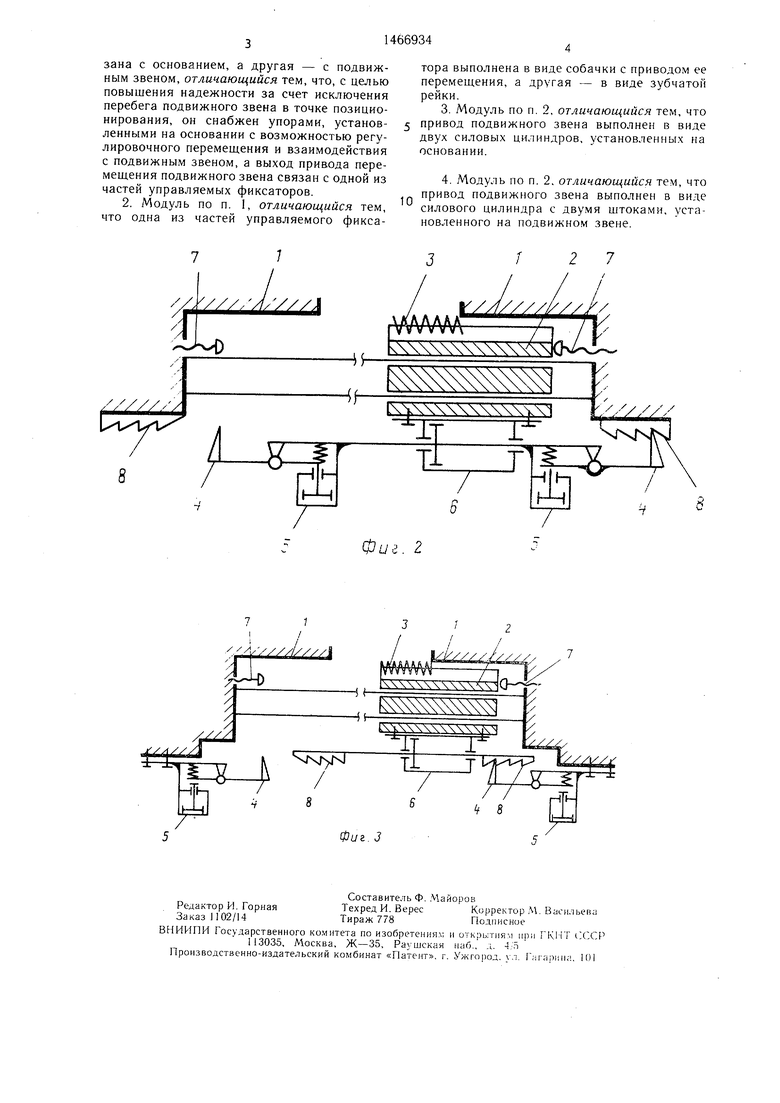
На фиг. 2 показан аналогичный модуль, по отличающийся тем, что привод подвижною звена и собачка установлены на подвижном звене 2, а зубчатая рейка 8 закреп- .чена на основании 1.
Конструктивно зубчатую рейку 8 и собачку 4 с приводом ее перемещения можно поменять местами (фиг. 3).
Модуль (фиг. 1) работает следующим образом.
В положении, показанном на (JMir. 1. подвижное звено находится в правой позиции. Правый привод 6 прижимает под1шл - ное звено 2 к упору 7 посредством собачки 4 и зубчатой рейки 8. При этом упругий элемент 3 аккумулятора находится в сжатом состоянии, благодаря чему система обладает запасом потенциальной энергии. Команда на выполнение движения поступает на привод 5 собачки, который освобождает подв,ижное звено 2, и оно под действием усилия упругого элемента 3 начинает разгоняться, переводя потенциальную упергию упругого элемента в кинетическую энергию подвижного звена. После прохождения свободного участка пути когда упругий элемент не взаимодействует с основа- Q пием) левый конец упругого элемента 3 начинает взаимодействовать с основанием, подвижное звено 2 начинает тормозиться за счет перехода кинетической энергии в подотягивает подвижное звено 2 до позиций, определяемой положением левого упора, деформируя при этом упругий элемент 3 и восполняя тем самым потерю энергии в аккумуляторе.
Потери энергии на трение не являются постоянной величиной для каждого модуля в силу различных причин, наиример из-за изменения вязкости смазки вследствие повышения (понижения) температуры. Перемещение одной из частей фиксатора навстречу движущемуся к нему нодвижному звену должно осуществляться с запасом на величину изменения потерь энергии на трение. Поэтому для падежной фиксации подвижного звена вторая часть 1|)иксатора выполнена в виде
зубчатой 1)ейки.
Команды на освобождение подвижного звена и 1еремеп1епие нротнво,1ожап1его привода навстречу нодвижному звену можно подавать одновременно. Также можно сов40 местнть команду на дотягивание подвижного звена 2 до упора 7 и приведение противо- лежан1его фиксатора в исходное состояние. Таким образом, сигналы управления противолежащими фиксаторами и приводами можно объединить попарно и уменыиить число каналов управления модулем вдвое. Аналогично работают модули, изображенные на фиг. 2 и 3. По этим же схемам возможно построение модулей углового перемещения.
Формула изобретения
45
тенциальную энергию упругого элемента.
,ri(tl lLJllJfl jii j ...j.- --.---j.
Если бы в системе не было потерь энер-55 элементом аккумулятора механической энергии на преодоление сил трения, то нод-гни, привод перемещения подвижного звена и вижное звено достигло бы левой позиции, приуправляемые фиксаторы его положения, сос- этом скорость звена стала бы равной нулю,тоящие из двух частей, одна из которых свяа деформация упругого элемента достигла бы такой же величины, какой была в правой позиции. Наличие в системе трения обусловливает необходимость установки привода, восполняюшего потери энергии на преодо- ление этих сил. Привод, который используется в данном мoдyлe не работает на восполнение потерь на трение в течение всего перемешения подвижного звена, а используется для дополнительной деформации
фиксатором поступает команда на левый
..5
0
0 относительно левого пр ивода. Затем посту- пает команда на левый привод 6, который
Q
дотягивает подвижное звено 2 до позиций, определяемой положением левого упора, деформируя при этом упругий элемент 3 и восполняя тем самым потерю энергии в аккумуляторе.
Потери энергии на трение не являются постоянной величиной для каждого модуля в силу различных причин, наиример из-за изменения вязкости смазки вследствие повышения (понижения) температуры. Перемещение одной из частей фиксатора навстречу движущемуся к нему нодвижному звену должно осуществляться с запасом на величину изменения потерь энергии на трение. Поэтому для падежной фиксации подвижного звена вторая часть 1|)иксатора выполнена в виде
зубчатой 1)ейки.
Команды на освобождение подвижного звена и 1еремеп1епие нротнво,1ожап1его привода навстречу нодвижному звену можно подавать одновременно. Также можно сов0 местнть команду на дотягивание подвижного звена 2 до упора 7 и приведение противо- лежан1его фиксатора в исходное состояние. Таким образом, сигналы управления противолежащими фиксаторами и приводами можно объединить попарно и уменыиить число каналов управления модулем вдвое. Аналогично работают модули, изображенные на фиг. 2 и 3. По этим же схемам возможно построение модулей углового перемещения.
45
Формула изобретения
зана с основанием, а другая - с подвижным звеном, отличающийся тем, что, с целью повышения надежности за счет исключения перебега подвижного звена в точке позиционирования, он снабжен упорами, установленными на основании с возможностью регулировочного перемещения и взаимодействия с подвижным звеном, а выход привода перемещения подвижного звена связан с одной из частей управляемых фиксаторов.
тора выполнена в виде собачки с приводом ее перемещения, а другая - в виде зубчатой рейки.
двух силовых цилиндров, установленных на основании.
силового цилиндра с двумя штоками, установленного на подвижном звене.
2 7
Фиг. 2
| Станки и инструмент | |||
| Колосниковая решетка с чередующимися неподвижными и движущимися возвратно-поступательно колосниками | 1917 |
|
SU1984A1 |
| Способ восстановления хромовой кислоты, в частности для получения хромовых квасцов | 1921 |
|
SU7A1 |
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
