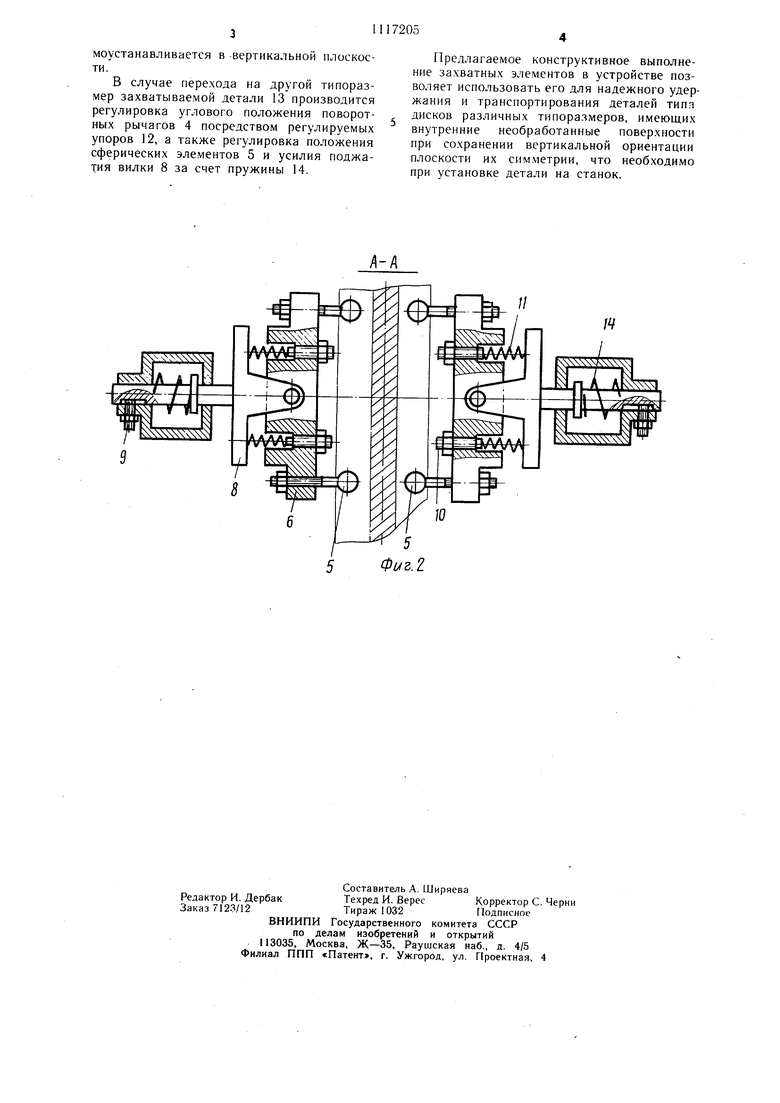
Изобретение относится к машиностроению, в частности станкостроению, и может быть использовано в роботизированных технологических комплексах и автоматических линиях для межстаночного транспортирования и загрузки станков и агрегатов. Известен схват, содержащий корпус, силовой цилиндр, связанный шарнирными многозвенниками с зажимными поворотными рычагами, несуишми захватные элементы, которые выполнены в виде пластины для зажима плоских грузов 1. : Недостатком этого схвата является то, ;что выполнение захватных элементов в виде ; плоских пластин, шарнирно связанных с зажимными рычагами, не позволяет произвводить захват с сохранением вертикальной ориентации деталей, имеющих необрабо танные поднутренные поверхности, напри:мер, дисков, фигурных литых колес и т. п. Наиболее близким к изобретению по технической сущности является схват робота, : содержащий корпус с закрепленным на :нем ложементом, силовой цилиндр, связанный шарнирными многозвенниками с поворотными рычагами, несущими захватные ;а;1ементы 2. : Недостатком известного схвата является .то, что при смене формы поверхности захватываемой детали необходимо каждый ;раз производить смену ложемента, к которому деталь поджимается губками. Кроме того, известный схват не обеспечивает ориентации в вертикальной плоскости деталей, имеюп1их внутренние необработанные по;верхности, таких как диски, литые колеса. |При этом наличие в схвате одной пары за:жимных губок и силовое замыкание на детали не обеспечивают достаточной устойчивости деталей с необработанными внутренними поверхностями. Цель изобретения - распшрение техноло|-ических возможностей путем захвата и транспортирования в вертикальном положении деталей типа дисков за внутренние необработанные поверхности. Эта цель достигается тем, что схват робота, содержащий корпус, силовой цилиндр, связанный щарнирными многозвенниками с поворотными рычагами, несущими захватные элементы, снабжен самоустанавливающимися подпружиненными коромыслами, подпружиненными вилками и регулируемыми упорами, а каждый захватный элемент выполнен в виде двух регулируемых сферических элементов, размещенных на самоустанавливающемся подпружиненном коромысле, шарнирно связанном с подпружиненной вилкой, установленной с возможностью осевого перемещения на поворотном рычаге, при этом регулируемые упоры установлены на поворотных рычагах с возможностью контакта с корпусом. Такое выполнение устройства позволяет осуществить надежный захват деталей типа дисков, фигурных отливок и т. п., и.меющих внутренние поднутренные необработанные поверхности с сохранением вертикальной ориентации плоскости их симметрии при транспортировании. При этом выполнение каждого захватного элемента в виде двух регулируемых сферических элементов, установленных на подпружиненном коро.мысле, позволяет ориентировать эти аде.менть соответственно профилю контактирующей поверхности и удерживать детали различных типоразмеров в вертикальном положении относительно оси симметрии захвата. На фиг. 1 представлен схват робота, вид спереди; на фиг. 2 - разрез А-А на фиг. 1. Устройство содержит корпус 1, в котором размешен привод в виде силового цилиндра 2, связанного шарнирными многозвенниками 3 с поворотными рычагами 4, 1есущими захватные элементы. Каждый захватный элемент выполнен в виде двух регулируемых сфери ;еских элементов 5, размещенных на коромысле 6, шарнирно смонтированном на оси 7 в вилке 8, которая установлена с возможностью осевого перемещения и фиксацией от проворота относительно поворотного рычага 4 посредством установочного винта 9. Регулировка положения коромысла 6 относительно вилки 8 осуществляется винтами 10 и пружинами 11. На поворотных рычагах 4 размещены регулируемые упоры 12, контактирующие с корпусо.м 1. Вилка 8 поджимается к захватываемой детали 13 пружиной 14. Схват работает следующим образом. В исходном положении схвата шток силового цилиндра 2 втянут внутрь, а поворотные рычаги 4 разведены в стороны. Деталь 13 перед захватыванием находится в вертикальном положении. При подаче рабочей среды в левую полость силового цилиндра 2 связанные с ним через многозвенники 3 поворотные рычаги 4 сходятся до тех пор, пока регулируемые упоры 12 не коснутся корпуса 1. При этом сферические элементы 5 входят во внутренние полости захватываемой детали 13. При подъеме схвата деталь 13 подхватывается сферически.ми элементами 5, каждый из которых касается внутренней поверхности детали 13 в одной точке. Сферические элементы 5 имеют три степени подвижности: за счет качания подпружиненного коромысла 6, осевого перемещения подвижной вилки 8 и поворотного рычага 4, вследствие чего компенсируются возможные неровности необработанной поверхности детали 13. и она под действием собственного веса самоустанавливается в .вертикальной плоскости.
В случае перехода на другой типоразмер захватываемой детали 13 производится регулировка углового положения поворотных рычагов 4 посредством регулируемых упоров 12, а также регулировка положения сферических элементов 5 и усилия поджатия вилки 8 за счет пружины 14.
Предлагаемое конструктивное выполнение за.хватных элементов в устройстве позволяет использовать его для надежного удержания и транспортирования деталей типп дисков различных типоразмеров, имеющих внутренние необработанные поверхности при сохранении вертикальной ориентации плоскости их симметрии, что необходимо при установке детали на станок.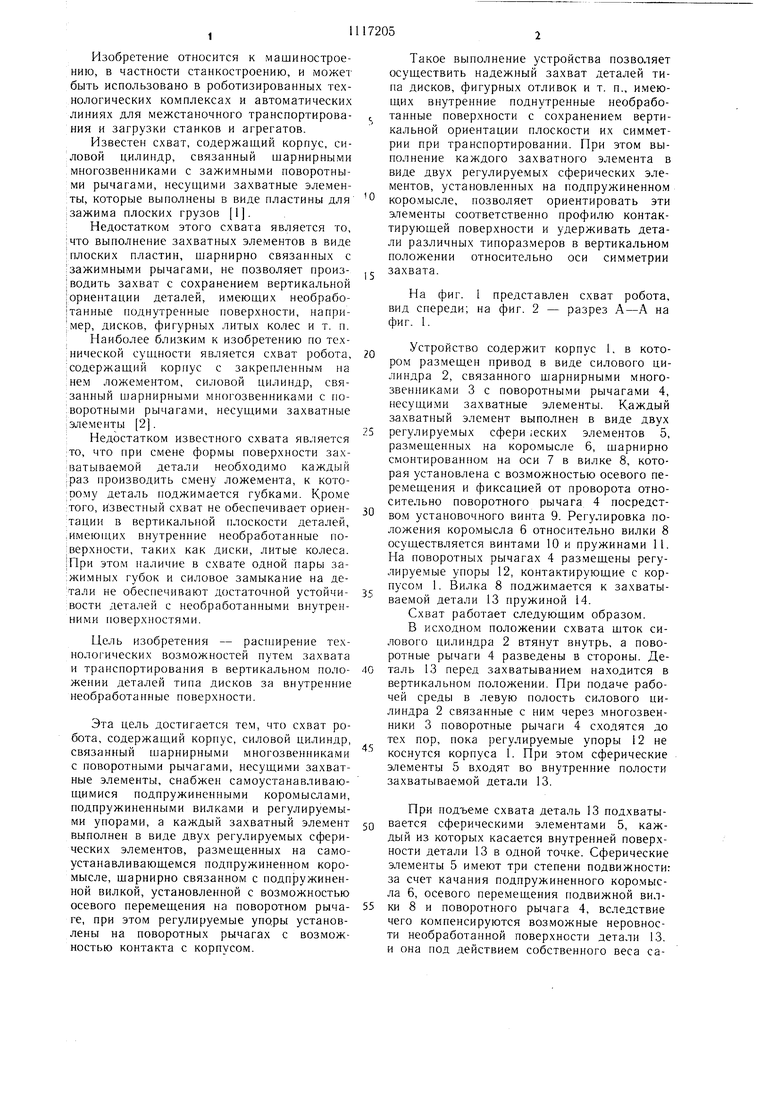
| название | год | авторы | номер документа |
|---|---|---|---|
| Автоматизированный комплекс для штамповки | 1985 |
|
SU1291253A1 |
| Схват робота | 1986 |
|
SU1350004A1 |
| Зубообрабатывающий модуль | 1986 |
|
SU1364442A1 |
| Схват робота | 1990 |
|
SU1761463A1 |
| Схват | 1982 |
|
SU1093543A1 |
| Манипулирующее устройство | 1982 |
|
SU1093537A1 |
| МНОГОПОЗИЦИОННОЕ ЗАХВАТНОЕ УСТРОЙСТВО МАНИПУЛЯТОРА | 1992 |
|
RU2033918C1 |
| Схват промышленного робота | 1985 |
|
SU1284830A1 |
| Робот к листоштамповочному прессу | 1986 |
|
SU1465158A1 |
| Схват | 1985 |
|
SU1289679A1 |
СХВАТ РОБОТА, содержащий корпус, силовой цилиндр, связанный шарнирными многозвенниками с поворотными рычагами, несущими захватные элеементы. отличающийся тем, что, с целью расширения технологических возможностей путем захвата и транспортирования в вертикальном положении деталей типа дисков за внутренние необработанные поверхности, он снабжен самоустанавливающимися подпружиненными коромыслами, подпружиненными вилками и. регулируемыми упорами, а каждый захватный элемент выполнен в виде дву.х регулируемых сферических элементов, размещенных на самоустанавливающемся подпружиненном коромысле, шарнирно связанном с подпружиненной вилкой, установленной с возможностью осевого перемещения на поворотном рычаге, при этом регулируемые упоры установ,1ены на поворотных рычагах с возможностью контакта с корпусом.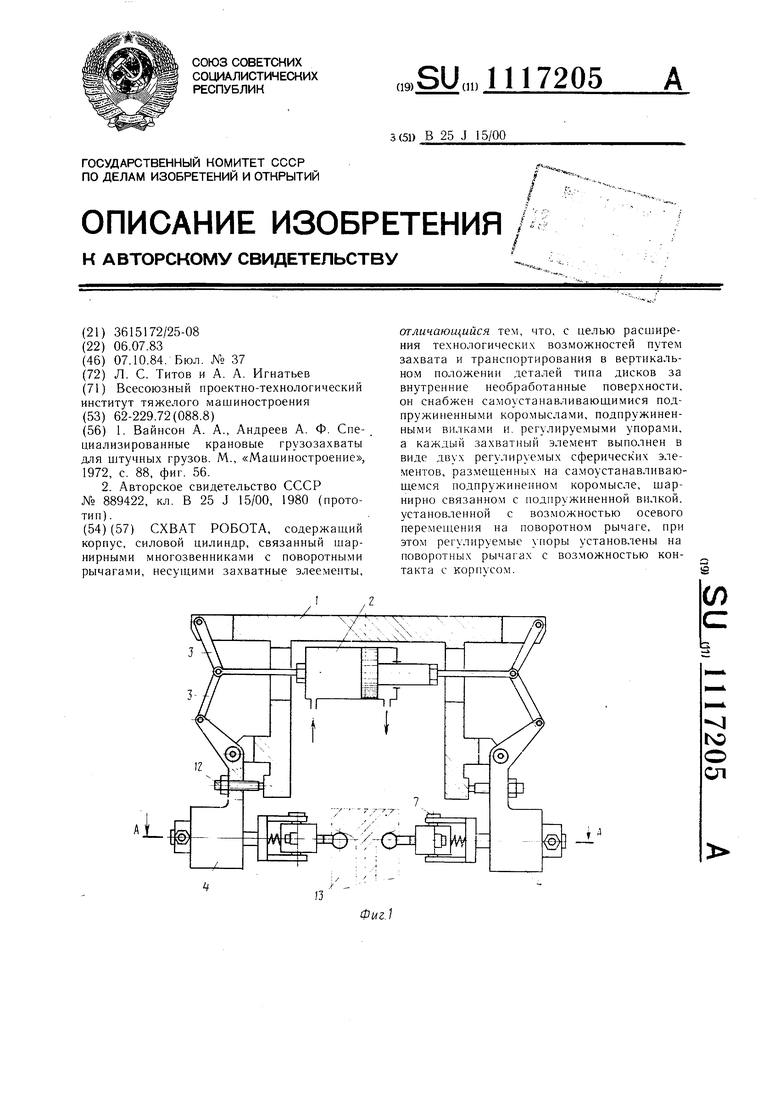
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Вайнсон А | |||
| А., Андреев А | |||
| Ф | |||
| Специализированные крановые грузозахваты для штучных грузов | |||
| М., «Машиностроение, 1972, с | |||
| Шланговое соединение | 0 |
|
SU88A1 |
| Приспособление для разматывания лент с семенами при укладке их в почву | 1922 |
|
SU56A1 |
| Аппарат для очищения воды при помощи химических реактивов | 1917 |
|
SU2A1 |
| Захват робота | 1980 |
|
SU889422A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
