N о
00 О5
о
CD
Изобретение относится к машиностроению, а именно к схватам промышленных роботов.
Целью изобретения является повышение надежности захвата деталей.
На фиг. 1 представлен схват, общий вид; на фиг. 2 - разрез А-А на фиг. 1; на фиг. 3 - положение губок схвата в открытом состоянии; на фиг. 4 - узел фиксации.
Схват промышленного робота содер- жит корпус-ловитель 1 схвата, на котором закреплен пневмопривод 2 со штоком 3, нижний конец которого выполнен в виде кронштейна.
Двуплечие рычаги 4 вращаются на осях 5 корпуса. Один конец рычагов 4 расположен в выточке б щтока 3, а другой - в пазах 7 зажимных элементов 8 и 9, которые перемещаются по направляющим 10.
Узел 11 фиксации выполнен в виде стержня 12 с пружиной 13 и расположен в на- правляющей втулке 14 зажимного элемента 9. Зажимной элемент 8 снабжен гнездом 15, диаметр которого больше диаметра стержня 12 на величину допустимого разброса линейного размера деталей 16. Зажимные элементы 8 и 9 между собой свя- заны пружинами 17. Шток подпружинен пружиной 18. Корпус-ловитель 1 схвата снабжен опорной площадкой 19 с выточкой 20 и вырезом 21, подпружинен пружиной
22и лежит на конусной опорной площадке
23второго корпуса 24. Корпус 1 снабжен гибкой передачей, например, карданом 25 и вторым приводом 26. Корпус 24 снабжен установочной площадкой 27 для крепления на руку 28 робота. Стержень 12 содержит шляпку 29 и выступ 30. Пружина 13 упирается в выступ 30 и через шайбу в кронштейн штока 3. Датчик 31, например конечный выключатель, установлен на зажимном элементе 9 с помощью кронштейна 32 и контактирует с кронштейном 33, закрепленным на зажимном элементе 8.
Схват работает следующим образом.
В исходном состоянии (питание не подано) шток 3 под действием пружины 18 находится вверху. Плечи рычагов 4 образуют зазор с верхней и нижней торцовыми поверхностями выточки 6. Зажимные элементы 8 и 9 под действием пружин 17 сжаты и зафиксированы стержнем 12, который находится в гнезде 15, так как нижний конец щтока сжал пружину 13, под воздействием которой стержень 12 в момент совпадения продольной оси с осью симметрии гнезда 15 заходит в него.
Для разжатия зажимных элементов схвата в надпоршневое пространство привода 2 подается питание (сжатый воздух) Рпнт.. Шток 3 под давлением сжатого воз- д.уха, действующего на поршень 2, перемещается вниз, сжимая пружину 18. Так как имеются зазоры между рычагами 4 и верхней торцовой поверхностью выточки 6, то
0 5
5
0
5
0
5
0
шток 3 перемещается вниз, а рычаги 4 и, следовательно, зажимные элементы 8 и 9 остаются на месте. Нижняя наружная торцовая поверхность стакана щтока 3 упирается в шляпку 29 стержня 12 и перемещает его вниз и выводит его верхний конец из гнезда 15 зажимного элемента 8 (фиг. 4). Зажимные элементы 8 и 9 расфиксиро- ваны.
При дальнейщем перемещении штока 3 вниз верхняя торцовая поверхность выточки 6 надавливает на рычаги 4 и начинает их поворачивать на оси 5. При этом противоположные концы рычагов 4, находящиеся в пазах 7, начинают разводить губки, которые по направляющим 10 расходятся в стороны, разжимая пружины 17.
Таким образом, схват разжат и готов к работе для проведения технологической операции по захвату детали 16. Схват с помощью руки 28 робота опускается на деталь 16. При этом он опорной площадкой 19 (выточкой 20) ложится на торцовую поверхность детали 16, и движение вниз корпуса 1 с зажимными элементами 8 и 9 прекращается, а корпус 24 продолжает перемещаться вниз, что возможно при наличии кардана 25. Пружина 22 сжимается и корпус 1 образует зазор с опорной площадкой 23 корпуса 24. В результате корпус 1 схвата приобретает свободу. Если торцовая поверхность детали 16 расположена не в горизонтальной плоскости, то площадка 19 дном выточки 20 под воздействием пружины 22 наклоняется и плотно прижимается к торцовой поверхности детали 16, поворачивая (наклоняя) зажимные элементы 8 и 9, которые становятся параллельны буртику или выточке детали 16. Эта конструктивная особенность обеспечивает надежный захват детали 16 за счет адаптации положения зажимных элементов 8 и 9 относительно положения торцовой поверхности детали 16. Подача питания прекращается. Давление сжатого воздуха над поршнем падает (стравливается в атмосферу). Шток 3 под действием пружины 18 перемещается вверх и перестает надавливать на рычаги 4. Под действием ранее растянутых пружин 17 зажимные элементы 8 и 9 начинают сходиться и поворачивать рычаги 4 на осях 5. При этом зажимной элемент 9 перемещает втулку 14 со стержнем 12, который перемещается по прорези в нижнем торце штока 3. Одновременно при перемещении щтока 3 вверх сжимается пружина 13, которая через выступ 30 создает силовое воздействие на стержень 12, и в момент, когда его ось симметрии совпадает с осью симметрии гнезда 15, стержень 12 войдет в него и зафиксирует зажимные элементы 8 и 9.
Выточка 6 выполнена таким размером, что после того как шток 3 остановится, рычаги 4 в выточке 6 установятся в среднем положении, а это позволит им при дальнейшем перемещении смещать губки зажимных элементов, а следовательно, и останавливаться им в любом промежуточном месте для совмещения своей оси симметрии с осью симметрии детали 16.
Таким образом, хрупкая деталь с буртиком захвачена губками без значительного усилия на торце, но надежно, так как узел 11 фиксации зафиксирован, а это позволит переносить хрупкие детали с большим весом.
Формула изобретения
Схват промышленного робота, содержащий базирующее приспособление, корпус
0
5
с внутренней конусной поверхностью, в котором установлен с возможностью перемещения подпружиненный ловитель, шток, кинематически связанный с зажимными элементами, например, с помощью рычагов с осями, отличающийся тем, что, с целью повышения надежности захвата, зажимные элементы снабжены узлом фиксации, выполненным в виде жестко смонтированного на штоке кронштейна и подпружиненного относительно него стержня, а в зажимных элементах выполнены гнезда, при этом стержень подвижно смонтирован в гнезде одного зажимного элемента и имеет возможность располагаться в гнезде другого зажимного элемента.

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для сборки | 1985 |
|
SU1315212A1 |
| Устройство для сборки | 1989 |
|
SU1705001A1 |
| Устройство для сборки деталей | 1990 |
|
SU1703347A1 |
| Зажимной патрон | 1983 |
|
SU1094675A1 |
| Схват | 1987 |
|
SU1440707A2 |
| Захватная головка манипулятора | 1986 |
|
SU1342727A1 |
| Устройство для сборки деталей типа вал-втулка | 1985 |
|
SU1288014A1 |
| Загрузочное устройство | 1985 |
|
SU1301630A1 |
| УСТРОЙСТВО ДЛЯ НАТЯЖКИ ПЕРЕДКА БОТИНКА НА КОЛОДКУ | 1971 |
|
SU322872A1 |
| Исполнительный орган сборочного манипулятора | 1980 |
|
SU961939A1 |
Изобретение относится к машиностроению, а именно к схватам промышленных роботов. Цель изобретения - повышение надежности захвата деталей. Устройство содержит корпус-ловитель 1, пневмопривод 2 со штоком 3, нижний конец которого выполнен в виде кронштейна. Шток 3 кинематически связан посредством двуплечих рычагов 4 с зажимными элементами 8 и 9. На зажимных элементах выполнен узел 11 фиксации в виде стержня 12, расположенного во втулке зажимного элемента 9 и имеющего возможность располагаться в гнезде 15 зажимного элемента 8, причем стержень 12 подпружинен относительно кронштейна. В исходном состоянии шток 3 под действием привода опущен, зажимные элементы 8 и 9 разведены рычагами 4. С помощью руки робота 28 схват опускается на деталь 16. При этом опорной площадкой он ложится на торцовую поверхность детали 16 и движение вниз корпуса-ловителя прекращается, а корпус 24 продолжит перемещаться вниз. В результате корпус-ловитель 1 схвата приобретает свободу, что необходимо, если деталь расположена не в горизонтальной плоскости, происходит адаптация зажимных элементов 8 и 9. После прекращения подачи давления в привод шток 3 перемещается вверх, зажимные элементы 8 и 9 сходятся. Стержень 12 входит в гнездо 15 зажимного элемента 8 и фиксирует элементы 8 и 9. Адаптивный датчик сигнализирует о состоянии схвата. После выполнения технологической операции в привод подается сжатый воздух, шток 3 опускается и схват возвращается в исходное состояние. 4 ил.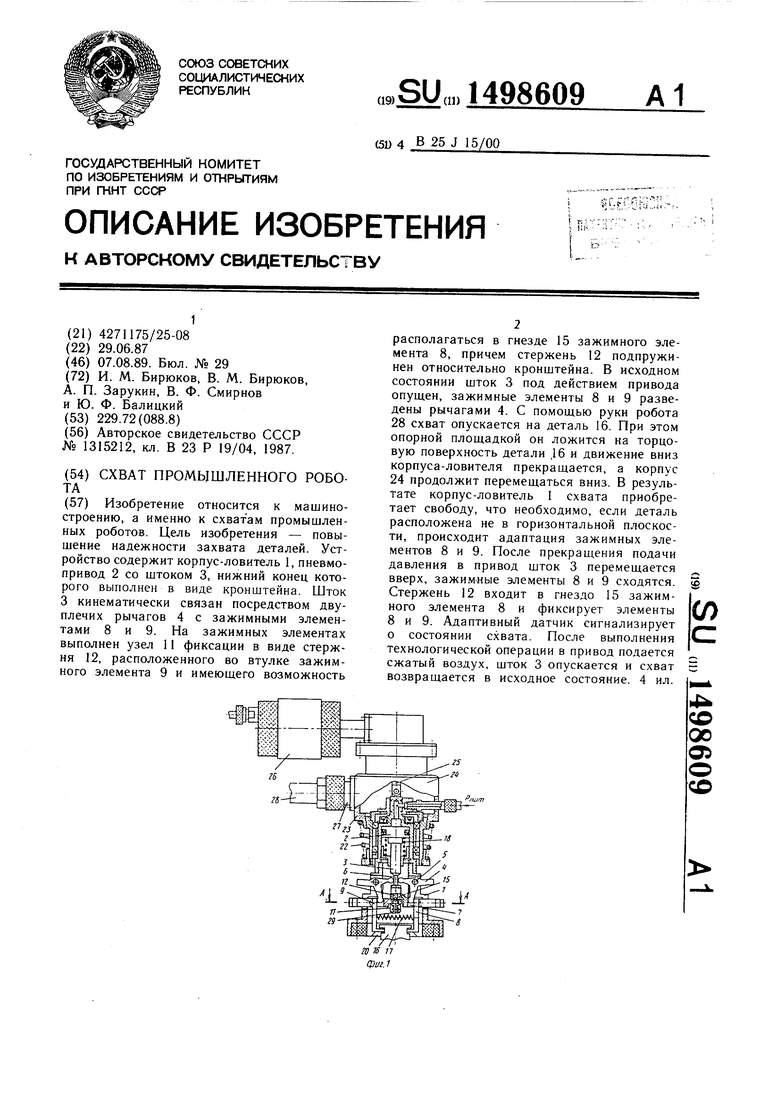
V//////////
рта1/УШф
///// ////
ЕЭЕ
31
фиг. г
-л
Ф(Л.
Г 10 21 19
| Устройство для сборки | 1985 |
|
SU1315212A1 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
