Изобретение относится к транспортному машиностроению, в частности к рулевому управлению колесных самоходных машин, преимущественно сельскохозяйственных
Целью изобретения является повышение устойчивости движения транспортного сред ства
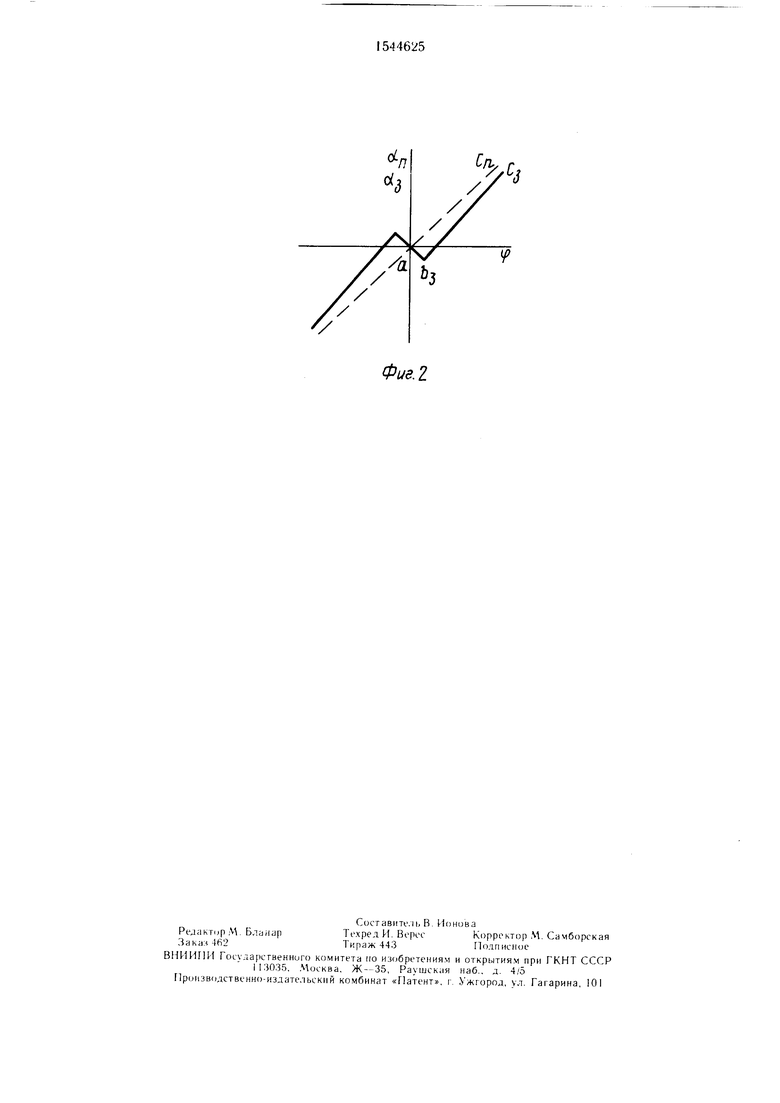
На фиг I изображена схема устройства управления, на фиг 2 - зависимости между углами поворота передних и задних управляемых колес
Устройство поворота управляемых колес транспортного средства содержит корпус I, связанный с помощью тяги 2 управления с рулевой трапецией 3 переднего мост-а и тягой 4 через следящий механизм 5 с рулевой трапецией 6 заднею моста Корпус снабжен двуплечим рычагом 7, шарнирно связан ным в средней своей части с тяти 2 прав ления от передней трапеции 3, одним плечом через тяги 4 правления со следящим механизмом 5 заднею моста, вторым установлен подвижно в упорах 8 и 9. причем между стенками корпуса I и плечом, соединяющим шарниры крепления тяг 2 и 4. установ лены предварительно поджатые 10 и 11
Упоры 8 и 9 выполнены подвижными и ступенчатыми и связаны посредством тяги 12 с рычагом М переключения режимов ра боты
Устройство работает следующим обра зо м
При повороте передних управ тяемых ко лес из нейтра 1ьн(по по южения, например, вправо тяга 2, смещаясь вниз относительно корпуса 1, смещает тягу 4 вверх то тех пор, пока рычаг 7 правым плечом не прется в пор 9 Такое воздействие тяги 4 через еле дящий механн зм 5 обеспечивает поворот вправо зааних правляемых колес, что соогвет ствует участк ab зависимости а /(()) (фиг 2) После nopa рычага 7 в упор 9 и осу шести тении дальнейшего поворота не редних управляемых колес в гом же направ лении рычаг 7 начинает сжимать пружину 1 1 смещая гяг 4 в том же направлении, ч го и перемещение тяги 2 При лом обеспечива ется поворот зачних управляемых колес вле во. т е осуществляется поворот транспорт ного средства согласованным способом На фиг 2 :ло соответствует часткам ш„ зави симости а. --/ I (| ) и b с зависимости а.
/ «О
5
0
-
0
5 5
5
0
Если направление поворота передних управляемых колес изменяется на противоположное и тяга 2 начинает смещаться в направлении переднего моста, то под действием пружины 11 начинает смещаться в том же направлении и тяга 4, обеспечивая поворот задних колес вправо Такой поворот задних колес осуществляется до тех пор, когда уравновесится действие пружин 10 и II, после чего рычаг 7 начинает отходить от упора 9, обеспечивая смещение тяги уже к заднему мосту и поворот задних колес влево до достижения нейтрального положения управляемых колес Это обеспечивает поворот задних управляемых колес до нейтрального положения соответственно по той же ломаной характеристике (фиг 2) Этим достигается однозначность изменения характеристики рулевого управления
Смещение ст пенчатых упоров 8 и 9 с помощью рычага 13 и тяги 12 обеспечивает фиксированное положение крайней правой точки рычага 7 и только синхронное (в одном направлении) смещени тя: 2 и 4 В данном случае обеспечивается движение транспорт ною средства сот тасованным способом
Формула и юпретения
Устройство поворота управляемых колес транспортного средства, содержащее рулевую трапецию пере inero мост,), кинематически связанную с рулевым механизмом и через MI ханизм согласования углов поворота управляемых колес переднего и заднего мое товсо следящим механизмом, кинематически связанным с рулевой трапецией зад- пего мое га. отличающееся тем, что. с целью повышения устойчивости движения транс портного средства, механизм согласования выпочнен в виде корпуса с размешенным внутри нею по шружиненным рычагом, один конец которою шарнирно связан со следящим механизмом,его средняя часть шарнирно связана с рулевой трапецией переднего мое га, а другой его конец установлен с воз можностью взаимодействия с упором, подвижно установленным в корпусе механизма согласования и связанным с органом его управления, причем упор выполнен cry пен чагой формы с возможностью ограниченного перемещения другого конца подпружинен ною рычага на различную величину в зависимости от положения органа управления
У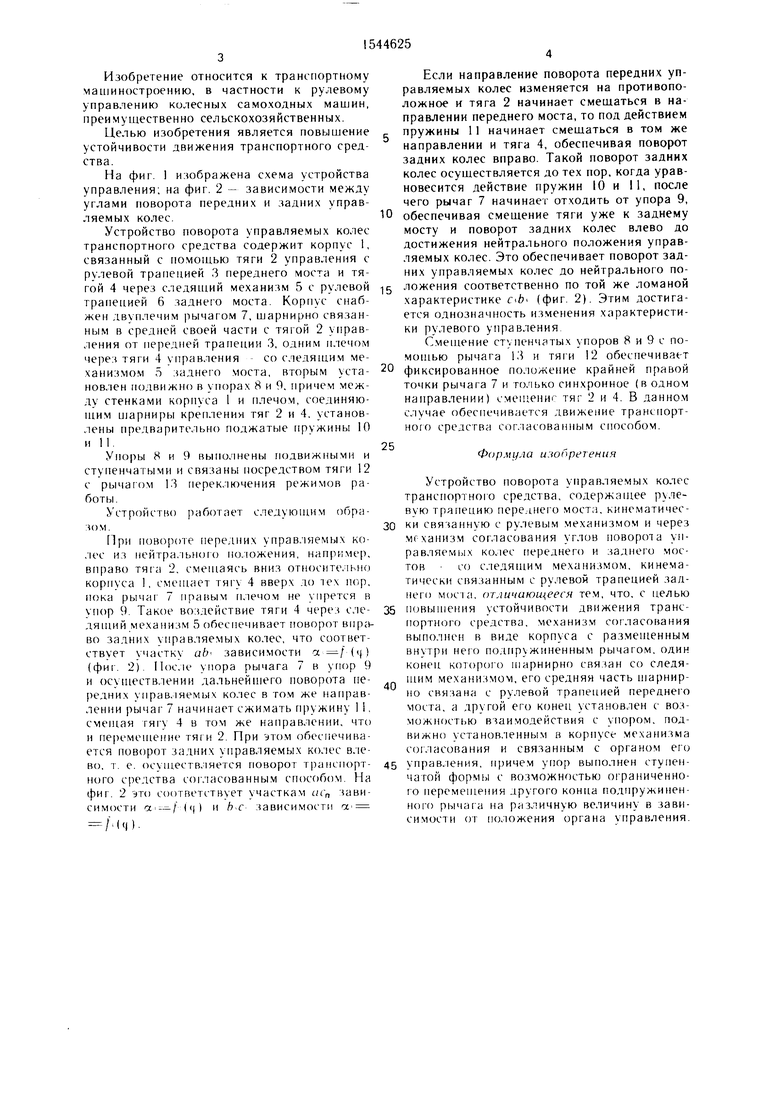
| название | год | авторы | номер документа |
|---|---|---|---|
| Рулевой привод транспортного средства с двумя управляемыми мостами | 1983 |
|
SU1126482A1 |
| Система рулевого управления транспортного средства со всеми и управляемыми колесами | 1984 |
|
SU1206161A1 |
| РУЛЕВАЯ СИСТЕМА АГРОМОБИЛЬНОГО АГРЕГАТА | 2015 |
|
RU2582738C2 |
| Рулевое управление транспортного средства со всеми управляемыми колесами | 1990 |
|
SU1729880A1 |
| Рулевое управление транспортного средства со всеми управляемыми колесами | 1988 |
|
SU1565741A1 |
| РУЛЕВАЯ СИСТЕМА УПРАВЛЕНИЯ ВСЕМИ КОЛЁСАМИ ТРАКТОРА | 2013 |
|
RU2545157C1 |
| ТЯГОВОЕ ТРАНСПОРТНОЕ СРЕДСТВО (ВАРИАНТЫ) | 1999 |
|
RU2163209C1 |
| Гидравлическая система рулевого управления шарнирно-сочлененного транспортного средства | 1978 |
|
SU765082A1 |
| СПОСОБ ДИСТАНЦИОННОГО ГИДРАВЛИЧЕСКОГО УПРАВЛЕНИЯ И ДИСТАНЦИОННОЕ РУЛЕВОЕ УПРАВЛЕНИЕ САМОХОДНОЙ МАШИНЫ | 2012 |
|
RU2488508C1 |
| Система рулевого управления транспортного средства | 1985 |
|
SU1252230A1 |
Изобретение относится к транспортному машиностроению, в частности к рулевому управлению колесных самоходных машин, преимущественно сельскохозяйственных. Целью изобретения является повышение устойчивости движения транспортного средства. Устройство снабжено двуплечим рычагом 7, шарнирно связанным в средней своей части с тягой передней трапеции 3, одним плечом через тягу 4 управления - со следящим механизмом 5 заднего моста, а вторым установлен подвижно в упоре 8, причем между стенками корпуса и плечом, соединяющим шарниры крепления тяг, установлены предварительно поджатые пружины 10. Упоры 8 выполнены с возможностью перемещения и связаны посредством тяг с рычагом 13 переключения режимов движения. При изменении положения упоров 8 изменяется фиксирование одного из концов рычага 7, а следовательно, и согласование кинематики углов поворота управляемых колес переднего и заднего мостов. 2 ил.
Фиг. 2
| Механизм переключения режимов движения транспортного средства со всеми управляемыми колесами | 1978 |
|
SU677977A1 |
