1
Изобретение относится к обработке металлов давлением и может быть использовано для транспортировки заготовок между позициями обработки в прессовом оборудовании.
Известно устройство для транспортировки заготовок и их ориентации в зоне обработки, содержащее опору и вращаемый от привода транспортный ротор с подвижно смонтированными на нем захватами заготовок l.
Недостатком известного устройства является его невысокел производительность и малая точность заготовки, .с жатая в захвате, перемещаясь по цик- - лоидальной траектории, совершает ненужное по технологическому циклу вращение вокруг своей оси.
Цель изобретения - повышение производительности и точности ориентации.
Указанная цель достигается тем, что устройство снабжено механизмами перемещения захватов заготовок между позициями обработки по траекториям, соответствующим удлинённым эпицикло- идам, каждый из которых выполнен в виде двух установленных в транспортном роторе валов с насаженными на осях на выходных концах валов криво- шипами, имеющими индивидуальный цри- ли
вод вращения, кулисы с продольными пазами и подвижно размещенной в этих пазах ползушкой, шарнирно связанной с осью одного из кривошипов, другой из которых шарнирно связан с кулисой, на KOTOpofi смонтированы захваты заготовок.
Привод кривошипов каждого из захватов выполнен в виде планетарного механизма, состоящего из двух связанных между собой промежуточной шестерней шестерен-сателлитов, установленных на валах кривошипов и закрепленных на опоре соосно ротору центральной шестерни, сцепленной с одной из шестерен-сателлитов.
Устройство снабжено также подвижной вдоль кулисы ползушкой, несущей захваты заготовок.
При этом для обеспечения выстоя захватов на позициях обработки, оно снабжено упорами, размещенными на концакползушки, несущей захваты.
Для обеспечения тсч можения захватов при подходе к позициям обработки, устройство снабжено смонтированным на кулисе двуплечим рычагом, одним плечом взаимодействующим с упором, размещенным на ползушкег, несущей захваты, а другим - с упором.
размещенным на ползушке. шарнирно сёяэанной с осью кривошипа.
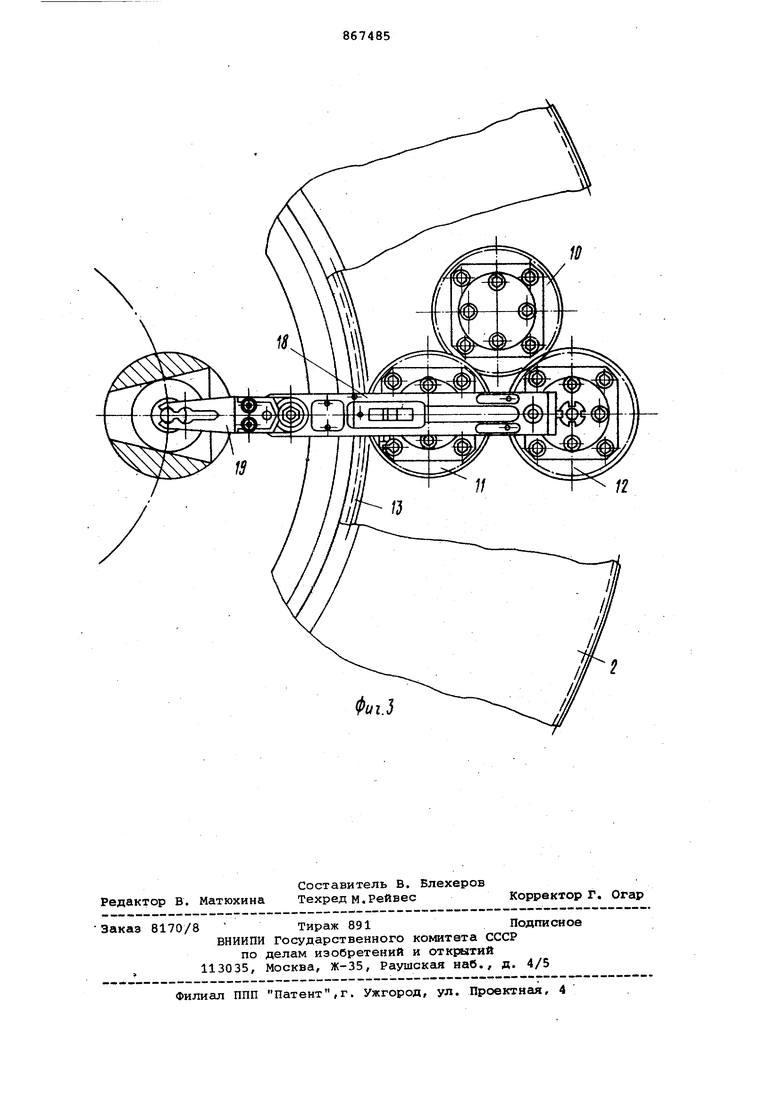
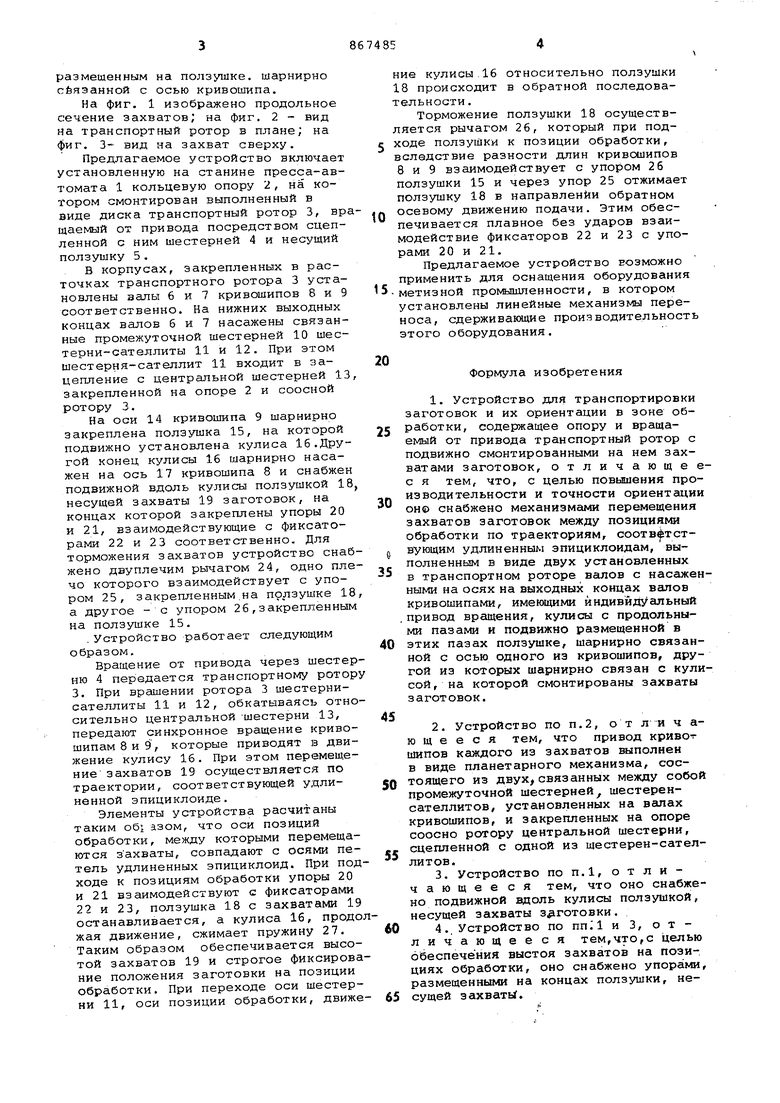
На фиг, 1 изображено продольное сечение захватов; на фиг, 2 - вид на транспортный ротор в плане; на фиг. 3- вид на захват сверху.
Предлагаемое устройство включает установленную на станине пресса-автомата 1 кольцевую опору 2, на котором смонтирован выполненный в виде диска транспортный ротор 3, вращаемый от привода посредством сцепленной с ним шестерней 4 и несущий ползушку 5.
В корпусах, закрепленных в расточках транспортного ротора 3 установлены валы 6 и 7 кривошипов 8 и 9 соответственно. На нижних выходных концах валов 6 и 7 насажены связанные промежуточной шестерней 10 шестерни-сателлиты 11 и 12. При этом шестерня-сателлит 11 входит в зацепление с центральной шестерней 13 закрепленной на опоре 2 и соосной ротору 3.
На оси 14 кривошипа 9 шарнирно закреплена ползушка 15, на которой подвижно установлена кулиса 16.Другой конец кулисы 16 шарнирно насажен на ось 17 кривошипа 8 и снабжен подвижной вдоль кулисы ползушкой 18 несущей захваты 19 заготовок, на концах которой закреплены упоры 20 и 21, взаимодействующие с фиксаторами 22 и 23 соответственно. Для торможения захватов устройство снабжено двуплечим рычагом 24, одно плечо которого взаимодействует с упором 25, закрепленным.на ползушке 18 а другое - с упором 26,закрепленным на ползушке 15.
. Устройство работает следующим образом.
Вращение от привода через шестерню 4 передается транспортному ротор 3. При врашении ротора 3 шестернисателлиты 11 и 12, обкатываясь относительно центральной -шестерни 13, передают синхронное вращение кривошипам 8 и 9, которые приводят в движение кулису 16. При этом перемещение захватов 19 осуществляется по траектории, соответствующей удлиненной эпициклоиде.
Элементы устройства расчитаны таким o6i азом, что оси позиций обработки, между которыми перемещаются захваты, совпадают с осями петель удлиненных эпициклоид. При подходе к позициям обработки упоры 20 и 21 взаимодействуют с фиксаторами 22 и 23, ползушка 18 с захватами 19 останавливается, а кулиса 16, продожая движение, сжимает пружину 27. Таким образом обеспечивается высотой захватов 19 и строгое фиксирование положения заготовки на позиции обработки. При переходе оси шестерни 11, оси позиции обработки, движение кулисы.16 относительно ползушки 18 происходит в обратной последовательности .
Торможение ползушки 18 осуществляется рычагом 26, который при подходе ползушки к позиции обработки, вследствие разности длин кривошипов В и 9 взаимодействует с упором 26 ползушки 15 и через упор 25 отжимает ползушку 18 в направлении обратном осевому движению подачи. Этим обеспечивается плавное без ударов взаимодействие фиксаторов 22 и 23 с упорами 20 и 21.
Предлагаемое устройство возможно применить для оснащения оборудования метизной промышленности, в котором установлены линейные механизмы переноса, сдерживающие производительность этого оборудования.
Формула изобретения
1. Устройство для транспортировки заготовок и их ориентации в зоне обработки, содержащее опору и вращаемый от привода транспортный ротор с подвижно смонтированными на нем захватами заготовок, отличающес я тем, что, с целью повыиения производительности и точности ориентаци онФ снабжено механизмами перемещения захватов заготовок между позициями обработки по траекториям, соотв тствующим удлиненным эпициклоидам,выполненным в виде двух установленных в транспортном роторе валов с насажеными на осях на выходных концах валов кривошипами, имеющими индивидуальный .привод вращения, кулисы с продольными пазами и подвижно размещенной в этих пазах ползушке, шарнирно связанной с осью одного из кривошипов, другой из которых шарнирно связан с кулисой, на которой смонтированы захваты заготовок.
2.Устройство по п.2, отличающееся тем, что привод криво шипов каждого из захватов выполнен
в виде планетарного механизма, состоящего из двух связанных между собой промежуточной шестерней, шестеренсателлитов, установленных на валах кривошипов, и закрепленных на опоре соосно ротору центральной шестерни, сцепленной с одной из шестерен-сателлитов.
3.Устройство по п.1, отличающее ся тем, что оно снабжено подвижной вдоль кулисы ползушкой, несущей захваты заготовки.
4.. Устройство по пп;1 и 3, от личающееся тем,что,с целью обеспечения выстоя захватов на позициях обработки, оно снабжено упорами, размещенными на концах ползушки, несущей захвать.
5. Устройство по пп. 1,3 и 4, о т личающееся тем, что,с целью обеспечения торможения захватов при подходе к позициям обработки, оно снабжено смонтированным на кулисе двуплечим рычагом, одним плечом взаимодействующим с упором, размещенным на ползушке, несущей захваты, а другим - с упором, размещенным на ползушке, шаряирно связанной с осью кривошипа.
Источники информации, принятые во внимание при экспертизе
1. Патент Великобритании W1115337, кл. В 3 В, 1974.
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ УКЛАДКИ ИЗДЕЛИЙ В ТАРУ | 1993 |
|
RU2091276C1 |
| УСТРОЙСТВО ДЛЯ ГРУППОВОЙ УКЛАДКИ ПРЕДМЕТОВ В ТАРУ | 1994 |
|
RU2091277C1 |
| Устройство для подачи заготовок | 1987 |
|
SU1548005A1 |
| Устройство для односторонней доводки деталей | 1986 |
|
SU1316798A2 |
| ПОДАЮЩЕЕ УСТРОЙСТВО | 1995 |
|
RU2080953C1 |
| Устройство для укладки предметов в тару | 1983 |
|
SU1138346A2 |
| УСТРОЙСТВО ДЛЯ УКЛАДКИ ПРЕДМЕТОВ В ТАРУ | 1996 |
|
RU2142392C1 |
| УСТРОЙСТВО ДЛЯ УКЛАДКИ ПРЕДМЕТОВ В ТАРУ | 1996 |
|
RU2137686C1 |
| Устройство для загрузки и выгрузки деталей | 1982 |
|
SU1055566A1 |
| УСТРОЙСТВО ТРАНСПОРТИРОВАНИЯ ПРЕДМЕТОВ ОБРАБОТКИ | 1993 |
|
RU2049644C1 |