3
а
5 /6
с
+
6
у 8
to
/7
СП
-U
00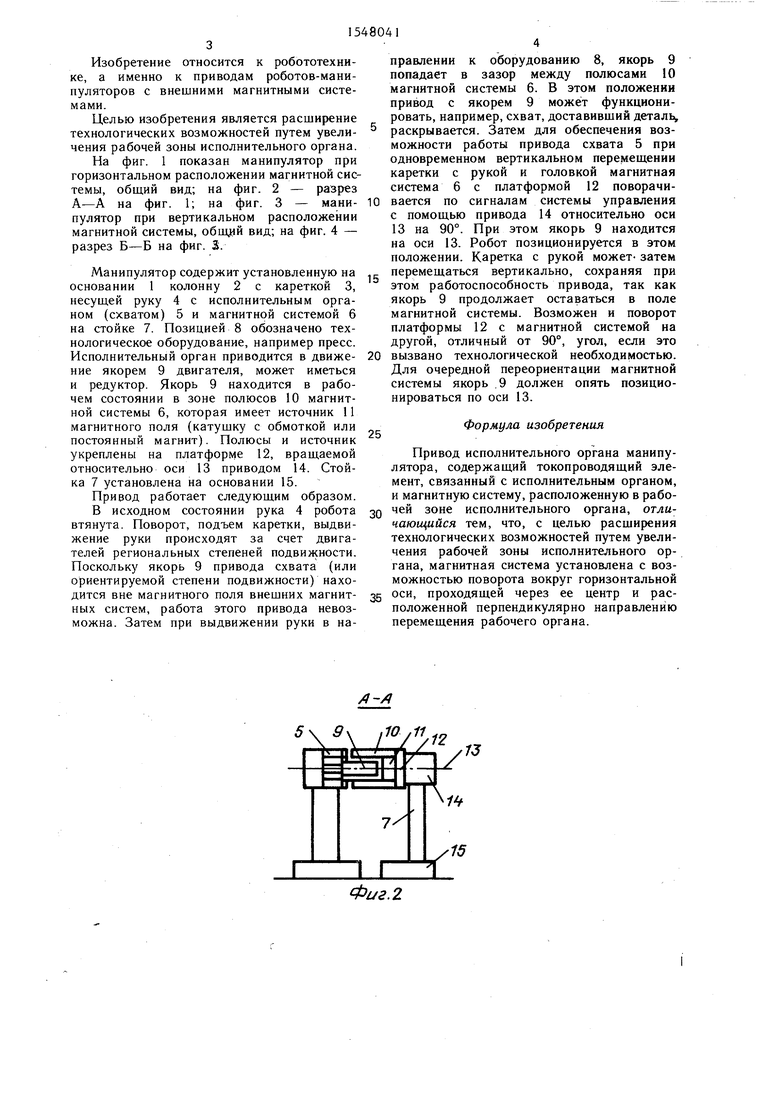
| название | год | авторы | номер документа |
|---|---|---|---|
| Исполнительный орган робота | 2015 |
|
RU2653397C2 |
| Промышленный робот | 2015 |
|
RU2654096C2 |
| Исполнительный орган рулевого привода | 2020 |
|
RU2774113C2 |
| Промышленный робот | 1986 |
|
SU1404330A1 |
| Исполнительный орган | 2020 |
|
RU2774238C2 |
| Исполнительный орган рулевого привода | 2020 |
|
RU2774236C2 |
| Промышленный робот | 1990 |
|
SU1722810A1 |
| Исполнительный орган рулевого привода | 2020 |
|
RU2759348C1 |
| Промышленный робот | 1990 |
|
SU1729740A1 |
| Промышленный робот | 1989 |
|
SU1684022A1 |

Изобретение относится к робототехнике, а именно к приводам роботов-манипуляторов с внешними магнитными системами. Целью изобретения является расширение технологических возможностей путем увеличения рабочей зоны исполнительного органа. Работа привода рабочего органа (схвата) 5 происходит при помощи якоря двигателя, расположенного на рабочем органе между полюсами магнитной системы 6. Для обеспечения работоспособности привода схвата при перемещении руки 4 манипулятора в вертикальном направлении магнитную систему 6 поворачивают вокруг горизонтальной оси, совпадающей с центром магнитной системы 6. 4 ил.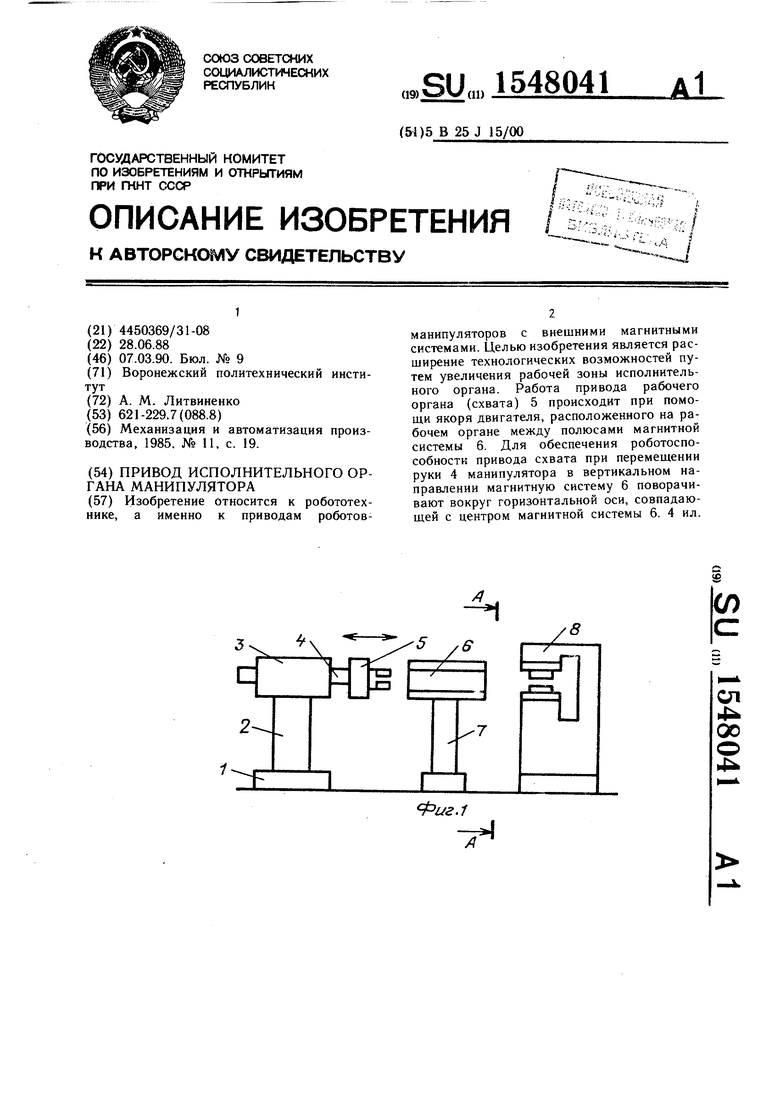
Фиг.1
Изобретение относится к робототехнике, а именно к приводам роботов-манипуляторов с внешними магнитными системами.
Целью изобретения является расширение технологических возможностей путем увеличения рабочей зоны исполнительного органа.
На фиг. 1 показан манипулятор при горизонтальном расположении магнитной системы, общий вид; на фиг. 2 - разрез
правлении к оборудованию 8, якорь 9 попадает в зазор между полюсами 10 магнитной системы 6. В этом положении привод с якорем 9 может функционировать, например, схват, доставивший деталь, 5 раскрывается. Затем для обеспечения возможности работы привода схвата 5 при одновременном вертикальном перемещении каретки с рукой и головкой магнитная система 6 с платформой 12 поворачиА-А на фиг. 1; на фиг. 3 - мани- 10 вается по сигналам системы управления пулятор при вертикальном расположении с помощью привода 14 относительно оси магнитной системы, общий вид; на фиг. 4 - 13 на 90°. При этом якорь 9 находится
разрез ББ на фиг. 3.на оси 13. Робот позиционируется в этом
положении. Каретка с рукой может- затем
Манипулятор содержит установленную на .,- перемещаться вертикально, сохраняя при основании 1 колонну 2 с кареткой 3,этом работоспособность привода, так как
несущей руку 4 с исполнительным орга-якорь 9 продолжает оставаться в поле
ном (схватом) 5 и магнитной системой 6магнитной системы. Возможен и поворот
на стойке 7. Позицией 8 обозначено тех-платформы 12 с магнитной системой на
нологическое оборудование, например пресс. другой, отличный от 90°, угол, если это Исполнительный орган приводится в движе- 20 вызвано технологической необходимостью. ние якорем 9 двигателя, может иметьсяДля очередной переориентации магнитной
и редуктор. Якорь 9 находится в рабочем состоянии в зоне полюсов 10 магнитной системы 6, которая имеет источник 11 магнитного поля (катушку с обмоткой или постоянный магнит). Полюсы и источник укреплены на платформе 12, вращаемой относительно оси 13 приводом 14. Стойка 7 установлена на основании 15.
25
системы якорь 9 должен опять позиционироваться по оси 13.
Формула изобретения
Привод работает следующим образом.
Привод исполнительного органа манипулятора, содержащий токопроводящий элемент, связанный с исполнительным органом, и магнитную систему, расположенную в рабоВ исходном состоянии рука 4 робота зо чеи зоне исполнительного органа, отливтянута. Поворот, подъем каретки, выдвижение руки происходят за счет двигателей региональных степеней подвижности. Поскольку якорь 9 привода схвата (или ориентируемой степени подвижности) нахочающийся тем, что, с целью расширения технологических возможностей путем увеличения рабочей зоны исполнительного органа, магнитная система установлена с возможностью поворота вокруг горизонтальной
дится вне магнитного поля внешних магнит- 35 оси проходящей через ее центр и рас- ных систем, работа этого привода невоз-положенной перпендикулярно направлению
можна. Затем при выдвижении руки в на-перемещения рабочего органа.
I1
Фиг.2
правлении к оборудованию 8, якорь 9 попадает в зазор между полюсами 10 магнитной системы 6. В этом положении привод с якорем 9 может функционировать, например, схват, доставивший деталь, раскрывается. Затем для обеспечения возможности работы привода схвата 5 при одновременном вертикальном перемещении каретки с рукой и головкой магнитная система 6 с платформой 12 поворачидругой, отличный от 90°, угол, если это вызвано технологической необходимостью. Для очередной переориентации магнитной
системы якорь 9 должен опять позиционироваться по оси 13.
Формула изобретения
Привод исполнительного органа манипулятора, содержащий токопроводящий элемент, связанный с исполнительным органом, и магнитную систему, расположенную в рабочеи зоне исполнительного органа, отличающийся тем, что, с целью расширения технологических возможностей путем увеличения рабочей зоны исполнительного органа, магнитная система установлена с возможностью поворота вокруг горизонтальной
-7J
/
1C
6
Фиг.З
Э
rf
Фиг.
| Механизация и автоматизация производства, 1985, № 11 | |||
| с | |||
| Способ изготовления электрических сопротивлений посредством осаждения слоя проводника на поверхности изолятора | 1921 |
|
SU19A1 |
