00
00
о
Изобретение относится к робототехнике, а именно к электротехническим манипуляторам промышленных роботов с внешними магнитными системами элек- Тродвигателей приводов.
Целью изобретения является расширение технологических возможностей за счет увеличения зоны обслуживания,,
На фиг,1 дан промышленньш робот, общий вид, частичньй разрез магнитной Системы; на фиг.2 - вид А на фиг.1; На фиг.З - вид Б на фиг.1; на фиг.4 - блок якорей электродвигателей приво- Йов; на фиг.З - кинематическая схема блока якорей; на фиг.6 - одна из возможных конфигураций воздушного зазора внешних магнитных систем для робота, функционирующего в прямоугольной сис- teMe координат; на фиг.7 - то же, в Случае цилиндрической системы координат; на фиг.8 - то же, в случае сферической системы координат; на фиг.9- фшиндрическая сборка магнитной системы, составленная из прямоугольных модулей и сегментных вставок; на фиг.10 - сечение В-В на фиг.9.
30
Робот включает в себя магнитную Систему, установленную на основании
1, имеющую катушки 2 и магнитопрово- Ды 3 с полюсными наконечниками 4. В Воздушном зазоре между наконечниками 4 расположена зона движения блока 5 Якорей приводов, фланец которого сое- , динен с блоком 6 редукторов, закрепленным на механизме 7 вьщвижения руки. Подъем руки осуществляется приводом 8. С торца, противоположного блоку 5 якорей, к руке прикреплен 0 блок 9 ориентации со схватом 10, За- Зор магнитных систем, например, для Варианта робота с цилиндрической системой координат состоит из трех участков (каналов): горизонтального 11 5 и двух вертикальных 12. Может быть и другая конфигурация. Робот установлен на вращающемся основании, снабженном приводом поворота. Вращающееся основание 13, как и основание 1 магнитных систем, установлено на полу цеха. Указанная конфигурация зазора магнитной системы выбрана из условия обслуживания вертикального накопителя 14 заготовок, технологической ма50
Блок 5 якорей приводов включает в себя основание 19 свыступами 20, в которых установлены подшипники 21 В подшипниках 21 вращаются валы яко рей 22, имеющих коллекторы 23. Осно вание снабжено также и стойками 24, на которых располагаются кинематиче кие передачи. В данном блоке имеетс три вала, передающих вращение от як рей. Все якори снабжены щеточными у лами 25, Вал 26 первого якоря вывед непосредственно через основание 2 снабженное фланцем 28. Вал 29 четве того от фланца якоря через зубчату пару 30 соединен с выходным валом 3 Вал 32 третьего ротора через зубчат пару 33 соединен с выходным валом 3 Вал 35 второго якоря через зубчатую пару 36 присоединен к валу 37. В пр моугольной системе координат, в маг нитной системе имеются только прямо угольные участки 38, В цилиндрическ системе, кроме того, есть и радиусн участки 39. Только из радиусных уча стков 39 составлен зазор в сферичес кой системе координат. Зазор любой конфигурации составляется в принцип из набора прямоугольных модулей и сегментных вставок 40. Вставки и мо дули сопрягаются с помощью соединительных элементов 41 с крепежными болтами 42. Сегментные вставки имею немагнитные участки 43. Для соедине ния горизонтальных и вертикальных каналов зазора применяются угловые соединительные элементы 44.
Робот функционирует следующим об разом.
Например, в цилиндрической систе координат при обслуживании трех раб чих позиций осуществляются следующи перемещения: у накопителя 14 - верт кальное перемещение блока 5 якорей; у накопителя 16 - вертикальное пере мещение блока 5 якорей в канале 12. Перемещение от накопителя 16 к нако пителю 14 и обратно, а также в райо размещения технологической машины 1 осуществляются при условии нахожден блока 5 якорей в горизонтальном кан
Г(шины 15 и вертикального накопителя 16 ле 11 магнитной системы. Поворот в
Q 5 0 5
0
0 5
0
18, повернутыми на четверть оборота относительно катушек 2.
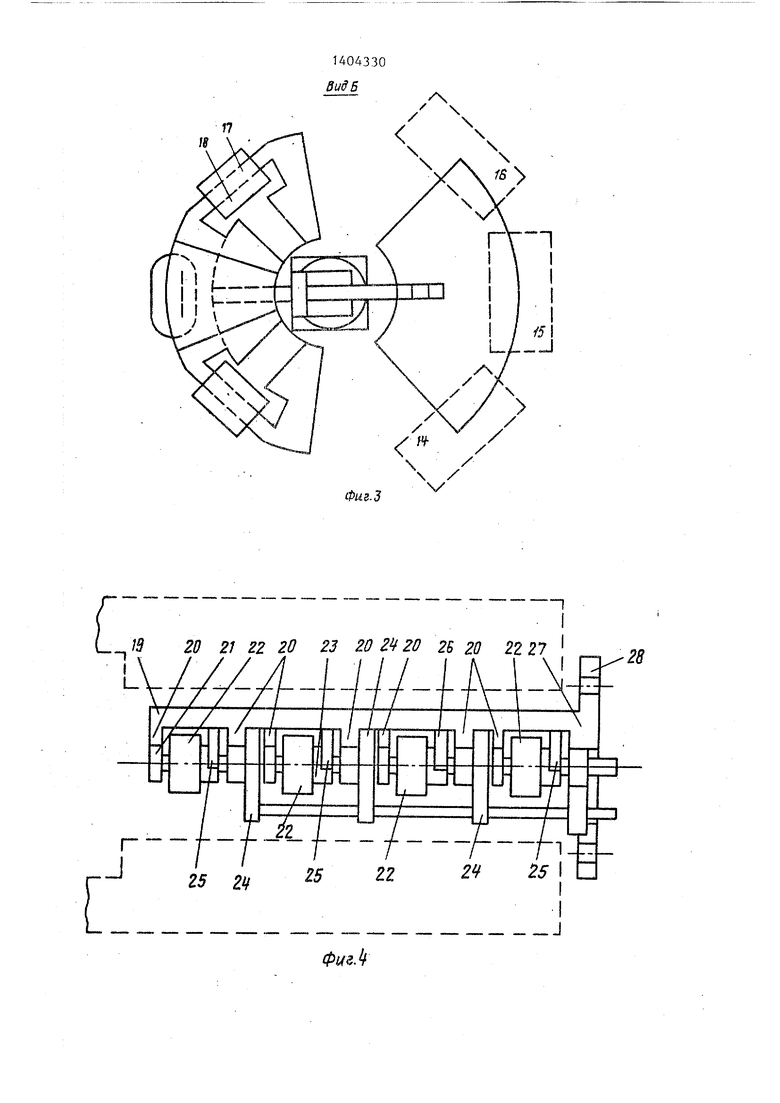
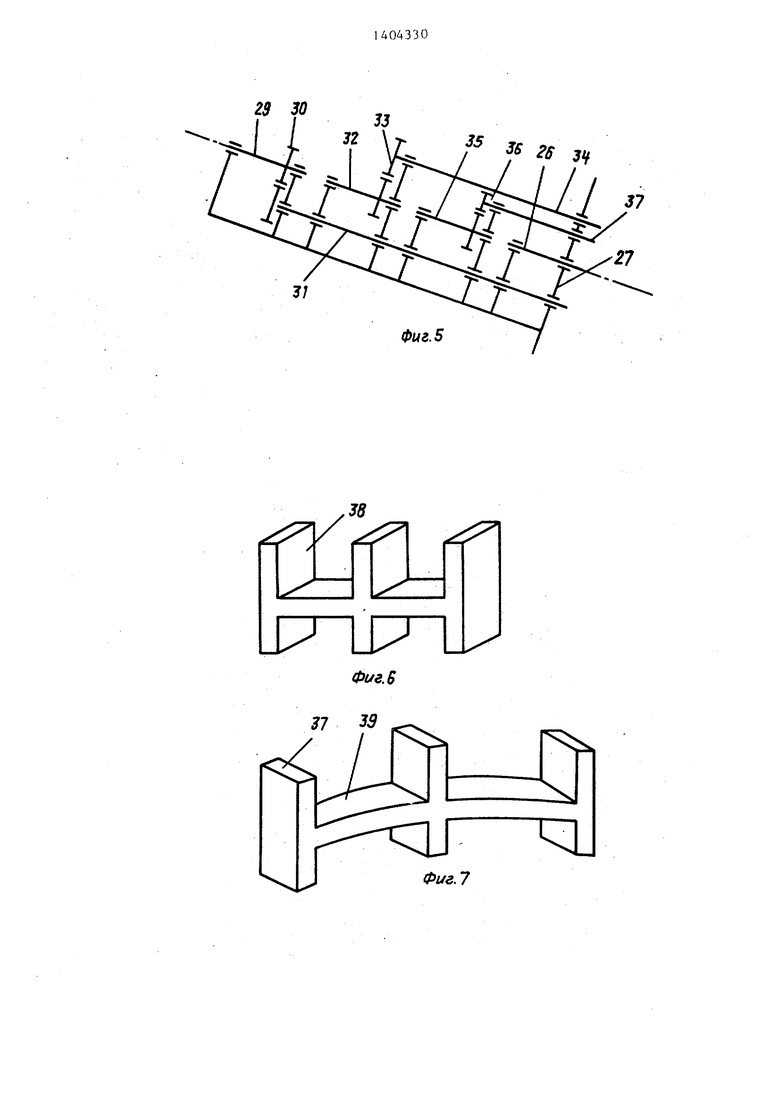
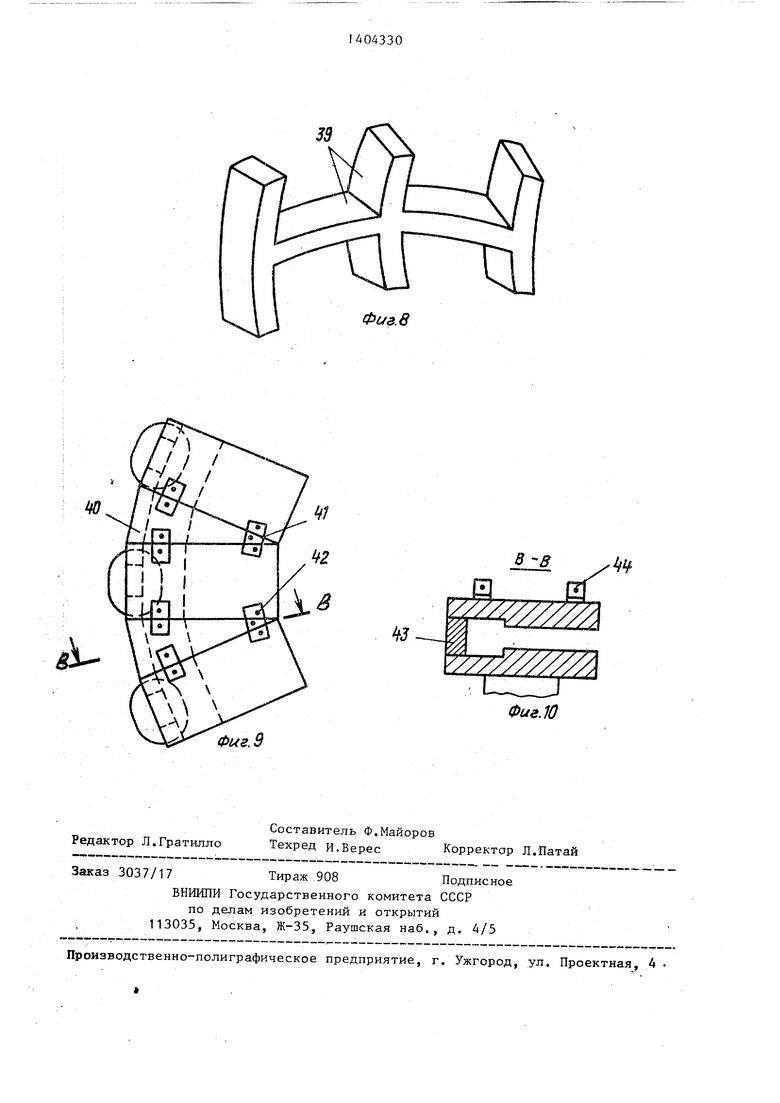
Блок 5 якорей приводов включает в себя основание 19 свыступами 20, в которых установлены подшипники 21, В подшипниках 21 вращаются валы якорей 22, имеющих коллекторы 23. Основание снабжено также и стойками 24, на которых располагаются кинематические передачи. В данном блоке имеется три вала, передающих вращение от якорей. Все якори снабжены щеточными узлами 25, Вал 26 первого якоря выведен непосредственно через основание 27, снабженное фланцем 28. Вал 29 четвертого от фланца якоря через зубчатую пару 30 соединен с выходным валом 31, Вал 32 третьего ротора через зубчатую пару 33 соединен с выходным валом 34. Вал 35 второго якоря через зубчатую пару 36 присоединен к валу 37. В прямоугольной системе координат, в магнитной системе имеются только прямоугольные участки 38, В цилиндрической системе, кроме того, есть и радиусные участки 39. Только из радиусных участков 39 составлен зазор в сферической системе координат. Зазор любой конфигурации составляется в принципе из набора прямоугольных модулей и сегментных вставок 40. Вставки и модули сопрягаются с помощью соединительных элементов 41 с крепежными болтами 42. Сегментные вставки имеют немагнитные участки 43. Для соединения горизонтальных и вертикальных каналов зазора применяются угловые соединительные элементы 44.
Робот функционирует следующим образом.
Например, в цилиндрической системе координат при обслуживании трех рабочих позиций осуществляются следующие перемещения: у накопителя 14 - вертикальное перемещение блока 5 якорей; у накопителя 16 - вертикальное перемещение блока 5 якорей в канале 12. Перемещение от накопителя 16 к накопителю 14 и обратно, а также в районе размещения технологической машины 15 осуществляются при условии нахождения блока 5 якорей в горизонтальном кана(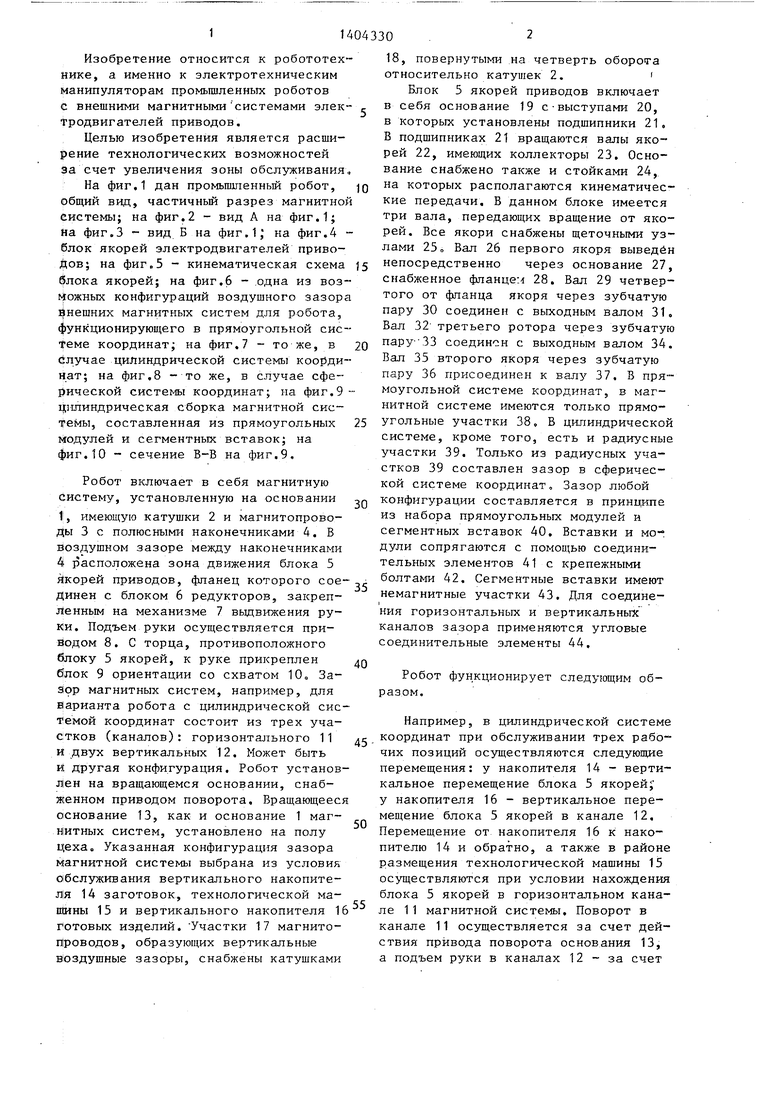

| название | год | авторы | номер документа |
|---|---|---|---|
| Промышленный робот | 1990 |
|
SU1805028A1 |
| СПОСОБ ОБМЕНА ГРУЗАМИ, УСТРОЙСТВО ОБМЕНА ГРУЗАМИ, СПОСОБ ФОРМИРОВАНИЯ ГРУЗОНЕСУЩЕЙ ПОВЕРХНОСТИ НАКОПИТЕЛЯ И ГИБКАЯ ПРОИЗВОДСТВЕННАЯ СИСТЕМА НА ИХ ОСНОВЕ | 2011 |
|
RU2486045C1 |
| Промышленный робот | 1990 |
|
SU1729740A1 |
| ПРОМЫШЛЕННЫЙ РОБОТ | 2001 |
|
RU2184030C1 |
| Промышленный робот | 1990 |
|
SU1722810A1 |
| Промышленный робот | 1987 |
|
SU1426781A1 |
| Робот промышленный | 2014 |
|
RU2634392C2 |
| Промышленный робот | 2015 |
|
RU2654096C2 |
| Робототехнический сборочно-сварочный комплекс | 1987 |
|
SU1537475A1 |
| Промышленный робот | 1987 |
|
SU1437216A1 |
Изобретение относится к робототехнике, а именно к электромеханическим манипуляторам промышленных роботов с внешними магнитными системами электродвигателей приводов. Целью изобретения является расширение технологических возможностей за счет увеличения зоны обслуживания. Якори электродвигателей приводов робота расположены последовательно друг относительно друга вдоль оси его резки и объединены в блок 5, расположенный в зазоре магнитной системы с полюсами 4, с возможностью перемещения . вдоль этого зазора. При манипулировании якори электродвигателей перемещаются вдоль зазора магнитной системы и по мере необходимости к ним подается электрическое напряжение для передачи вращающего момента от вала якорей через кинематическую передачу к ускорительному органу. 10 ил. ,i I (Л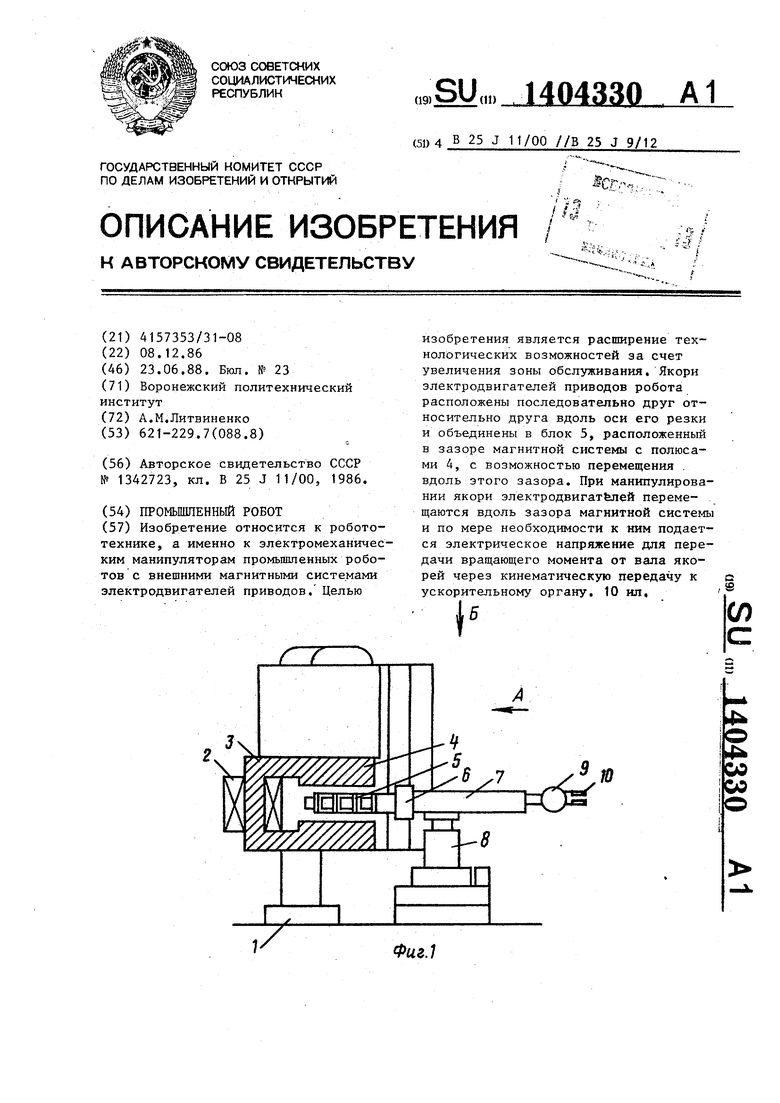
готовых изделий. Участки 17 магнито- п1роводов, образующих вертикальные в оздушные зазоры, снабжены катушками
канале 11 осуществляется за счет действия привода поворота основания 13, а подъем руки в каналах 12 - за счет
работы привода 8 подъема руки 7. Блок якорей 5 осуществляет в данном случае выдвижение руки 7, ориентацию схвата 10, в частности поворот схвата относительно вертикальной и горизонтальной плоскостей, и работу самого схвата. 10 Все эти четыре движения могут быть осуществлены в любом месте траектории при условии нахождения блока 5 в каналах 11 или 12. Позиционирование блока 5 в этих каналах осуществляется за счет штатной системы датчиков положения и системы управления роботом (не показаны).
Формула изобретения Промьпиленньй робот, содержащий руку со схватом на одном ее конце и приводы перемещения руки и схвата, якори электродвигателей которых расположены в зазоре магнитной системы с возможностью перемещения вдоль этого зазора, отличающийся тем, что, с целью расширения технологических возможностей за счет увеличения зоны обслуживания, якори электродвигателей расположены последовательно друг относительно друга вдоль оси руки и связаны с другим ее конпом .
Фиг. 2
1А04330 В lid В
W 20 21 22 20 23 20 2 20 2В 20 22 27
П
Фие.З
28
23 30
;
Фиг.1
37 39
S 2S
4
Фиг. 5
J8
r
Фиг.7
S9
Фиг. 9
В-в
иГ
3
777////.
Фиг.Ю
| Промышленный робот | 1986 |
|
SU1342723A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
