Изобретение относится к машиностроению и может быть использовано в манипуляторах с дистанционным управлением для замены инструмента (схвата).
Целью изобретения является повышение надежности устройства за счет уменьшения погрешности взаимного позиционирования сопрягаемых элементов.
На фиг. 1 изображено устройство для автоматической смены инструмента промышленного робота до присоединения инструмента к манипулятору; на фиг. 2 - то же, в момент стыковки наконечника манипулятора с гильзой инструмента; на фиг. 3 - то же, поперечное сечение; на фиг. 4 - схема фиксации инструмента на наконечнике манипулятора.
Устройство для автоматической смены инструмента промышленного робота содержит наконечник 1 в виде цилиндрического элемента с радиально расположенными зубцами 2, установленный на манипуляторе промышленного робота, и гильзу 3 с внутренними продольными пазами 4 и конической составляющей внутренней поверхности, закрепленную на сменном инструменте. Последний размещается в гнезде магазина 5. На наконечнике 1 установлена втулка 6, внешняя поверхность которой выполнена конической. Для обеспечения условия сборки коническая втулка б изготавливается разъемной (из двух полуколец скрепленных между собой). Посредством пальцев 7 коническая втулка 6 взаимосвязана с подпружиненным стаканом 8. Пальцы 7 установлены в продольных пазах 9 наконечника 1. Стакан 8 подпружинен пружиной 10 и установлен внутри наконечника 1. В гнезде магазина 5 предусмотрен упор 11, располагающийся коаксиаль- но гильзе 3. Торцевая поверхность гильзы 3 и противолежащая ей поверхность наконечника 1 (по торцевым поверхностям зубцов 2) имеют рифления 12, которые могут быть выполнены в виде радиально расположенных зубьев.
Устройство работает следующим образом.
Сенный инструмент размещен в гнезде магазина 5 таким образом, что упор 11 располагается внутри гильзы 3. Наконечник 1 манипулятора устанавливается соосно с гильзой 3, при этом радиально расположенные зубцы 2 наконечника 1 совпадают с продольными пазами 4 гильзы 3 (фиг. 1).
Вертикальным перемещением манипулятора наконечник 1 вводится в гильзу 3 и подпружиненный стакан 8 взаимодействует с упором 11. За счет этого взаимодействия происходят сжатие пружины 10 и вертикальное перемещение подпружиненного стакана 8 и конической втулки 6,
0
соединенных пальцами 7, которые двигаются по продольным пазам 9 наконечника 1. Движение наконечника 1 вниз производится до достижения зазора 6i между нижней торцевой повехностью гильзы 3 и противолежащей ей поверхностью радиально расположенных зубцов 2 наконечника 1 (фиг. 2 и 3).
При движении наконечника сохраняется также зазор 62 между коническими поверхностями гильзы 3 и конической втулкой 6, что позволяет выполнить операцию стыковки несмотря на погрешность взаимного позиционирования (центрирования).
По достижении заданной величины 6i
перемещение наконечника 1 вниз прекращается, после чего манипулятор производит поворот наконечника 1 на угол, обеспечивающий совмещение радиально расположенных зубцов 2 с торцевой поверхностью гильзы 3 (установка рифлений 12 друг против друга). После этого происходит подъем наконечника 1, во время которого под действием пружины 10 осуществляются самоцентрирование элементов устройства по коническим сопрягающимся поверх5 ностям и взаимная фиксация по рифлениям 12, что предотвращает поворот инструмента относительно продольной оси манипулятора (фиг. 4). Продолжая подъем, манипулятор извлекает закрепленный сменный инструмент из гнезда магазина 5.
0 При отсоединении инструмента порядок действий сохраняется, только поворот наконечника 1 производится в противоположную сторону или в ту же, но на величину угла, необходимую для вывода радиально расположенных зубцов 2 из зацепления
5 с торцевой поверхностью гильзы 3.
Формула изобретения
1. Устройство для автоматической смены 0 инструмента промышленного робота, содержащее магазин с гнездом для инструмента, закрепленный на механической руке наконечник в виде полого цилиндрического элемента с радиально расположенными зубцами и гильзу с внутренними продоль- 5 ными пазами, установленную на инструменте, отличающееся тем, что, с целью повышения надежности за счет уменьшения погрешности взаимного позиционирования сопрягаемых элементов, оно снабжено конической втулкой, подпружиненным стаканом, размещенным в наконечнике, и упором, установленным в гнезде магазина с возможностью взаимодействия с подпружиненным стаканом, причем в наконечнике выполнены продольные пазы, а коническая втулка 5 установлена на внешней поверхности наконечника и жестко связана с подпружиненным стаканом посредством пальцев, размещенных в продольных пазах наконечника,
0
при этом на торцевой поверхности гильзы со стороны гнезда и торцевой поверхности наконечника выполнены рифления.
2. Устройство по п. 1, отличающееся тем, что рифления выполнены в виде радиально расположенных зубьев.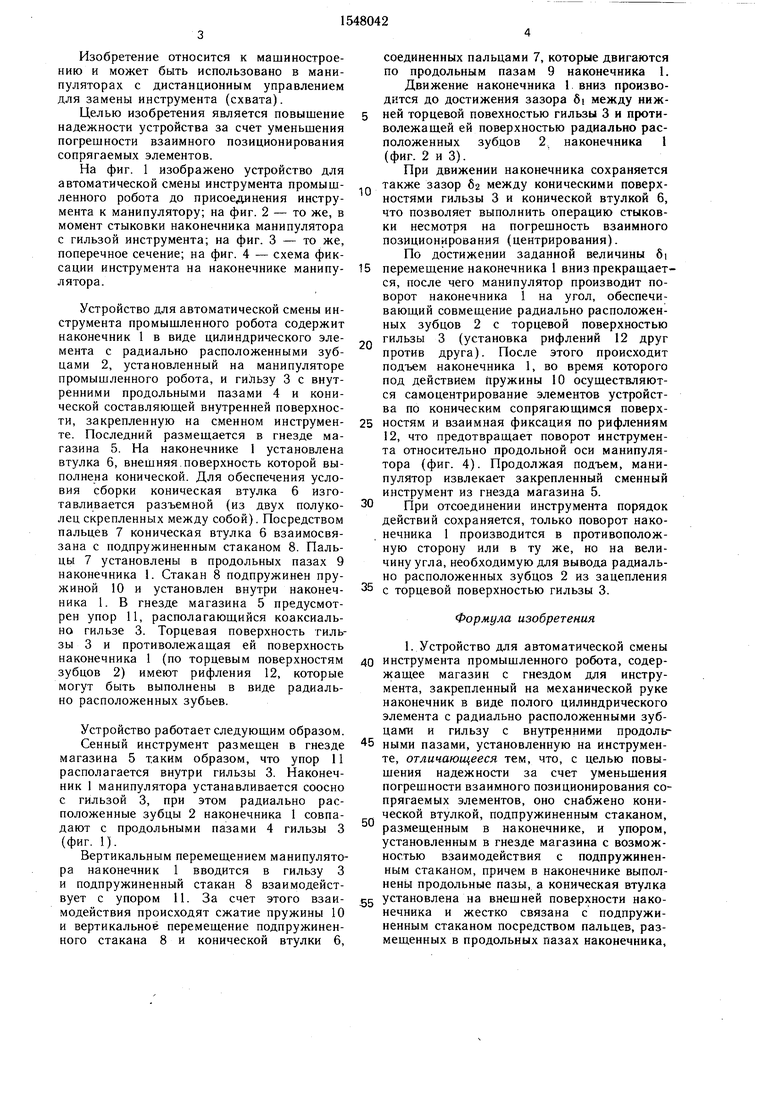
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для автоматической смены инструментальных оправок | 1985 |
|
SU1273242A1 |
| Устройство для сборки деталей типа вал-втулка | 1985 |
|
SU1288014A1 |
| Устройство автоматической смены инструмента манипулятора | 1988 |
|
SU1583286A1 |
| Схват робота | 1981 |
|
SU994256A1 |
| Устройство для автоматической смены инструментальных оправок | 1985 |
|
SU1283101A1 |
| ЗАХВАТ ДЛЯ ПОДЪЕМА И ПЕРЕМЕЩЕНИЯ АМПУЛ С ПУЧКАМИ ОТРАБОТАВШИХ ТЕПЛОВЫДЕЛЯЮЩИХ ЭЛЕМЕНТОВ | 2018 |
|
RU2684394C1 |
| УСТРОЙСТВО ДЛЯ ПОШТУЧНОЙ ВЫДАЧИ ЗАГОТОВОК | 1990 |
|
RU2023572C1 |
| УСТРОЙСТВО ЯКОРНОЕ МНОГОРАЗОВОГО ИСПОЛЬЗОВАНИЯ (ТРИ ВАРИАНТА) | 2014 |
|
RU2563470C1 |
| Устройство автоматической смены инструмента | 1989 |
|
SU1720832A1 |
| Металлорежущий станок с устройством для автоматической смены инструмента | 1976 |
|
SU657953A1 |

Изобретение относится к машиностроению и может быть использовано в манипуляторах с дистанционным управлением для замены инструмента (схвата). Целью изобретения является повышение надежности за счет уменьшения погрешности взаимного позиционирования сопрягаемых элементов. Наконечник 1, закрепленный на механической руке промышленного робота, опускаясь и взаимодействуя с упором 11 гнезда магазина 5 посредством подпружиненного стакана 8, центрируется коническими поверхностями гильзы 3 и конической втулки 6, жестко связанной с подпружиненным стаканом 8. Рифления 12, выполненные на торцовых поверхностях наконечника 1 и гильзы 3, обеспечивают надежность их фиксации. 1 з.п. ф-лы. 4 ил.
11
в
п
фигМ
| Радиационно-защитная техника | |||
| Соединение наконечника манипулятора с его рабочим органом (инструментом) | |||
| Конструкция и размеры | |||
| Прибор для очистки паром от сажи дымогарных трубок в паровозных котлах | 1913 |
|
SU95A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
