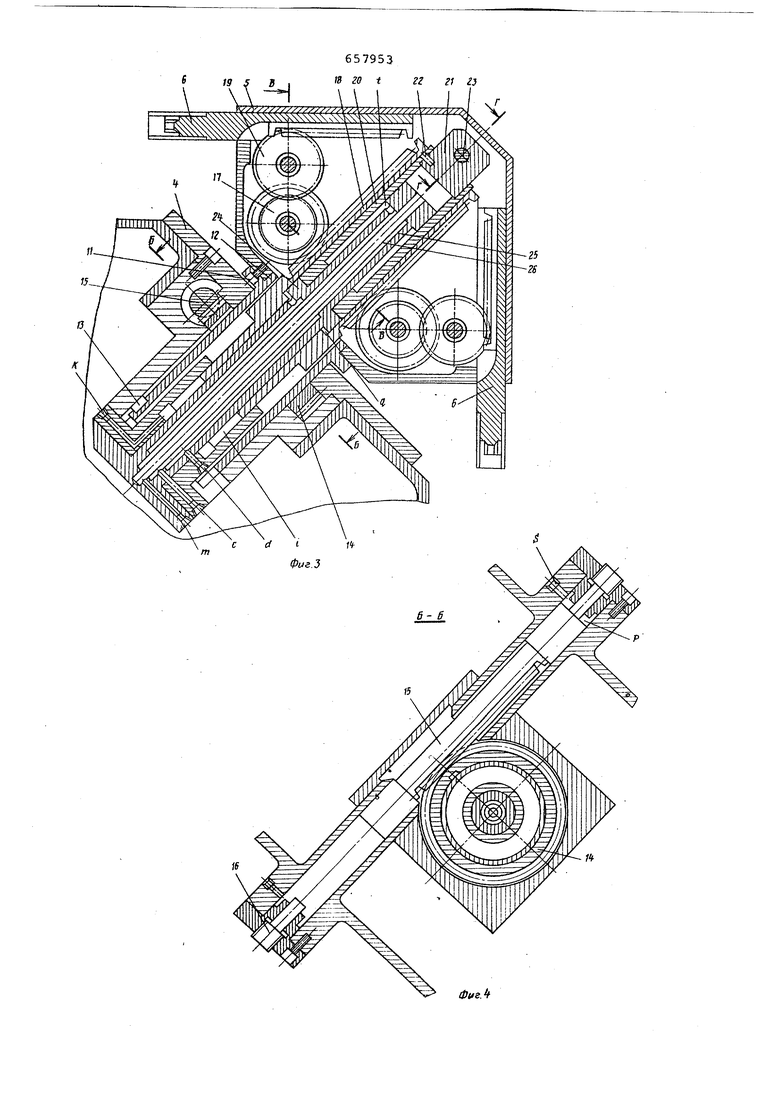
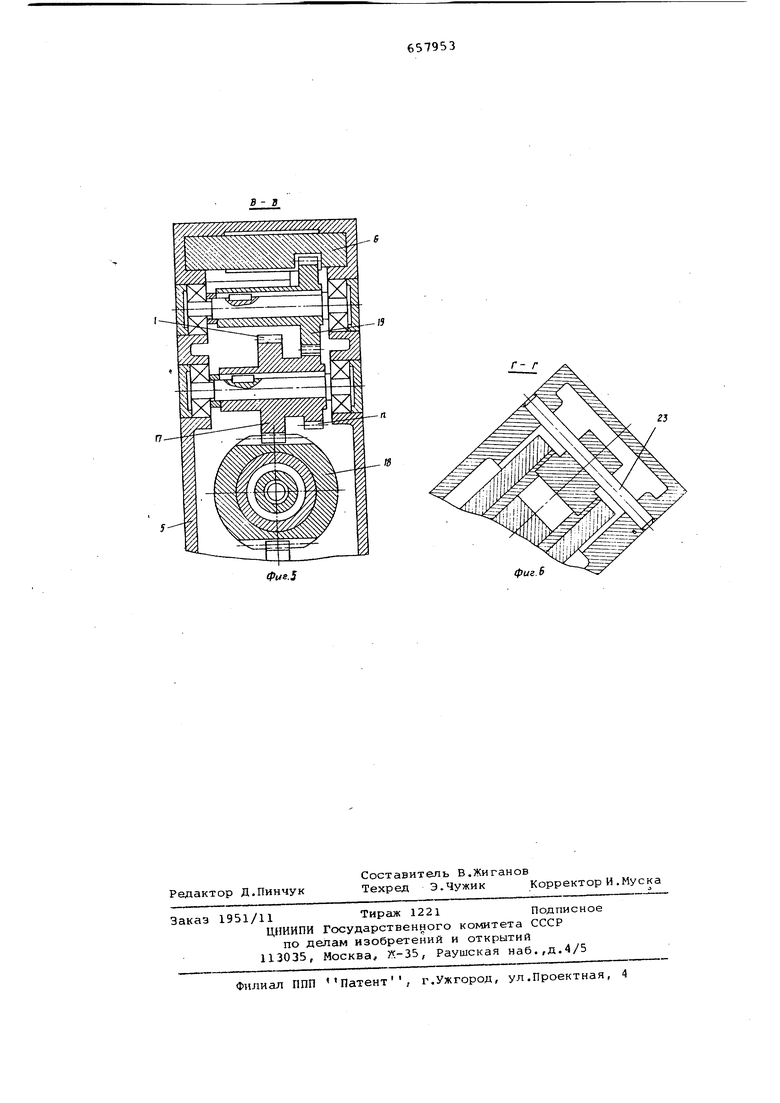
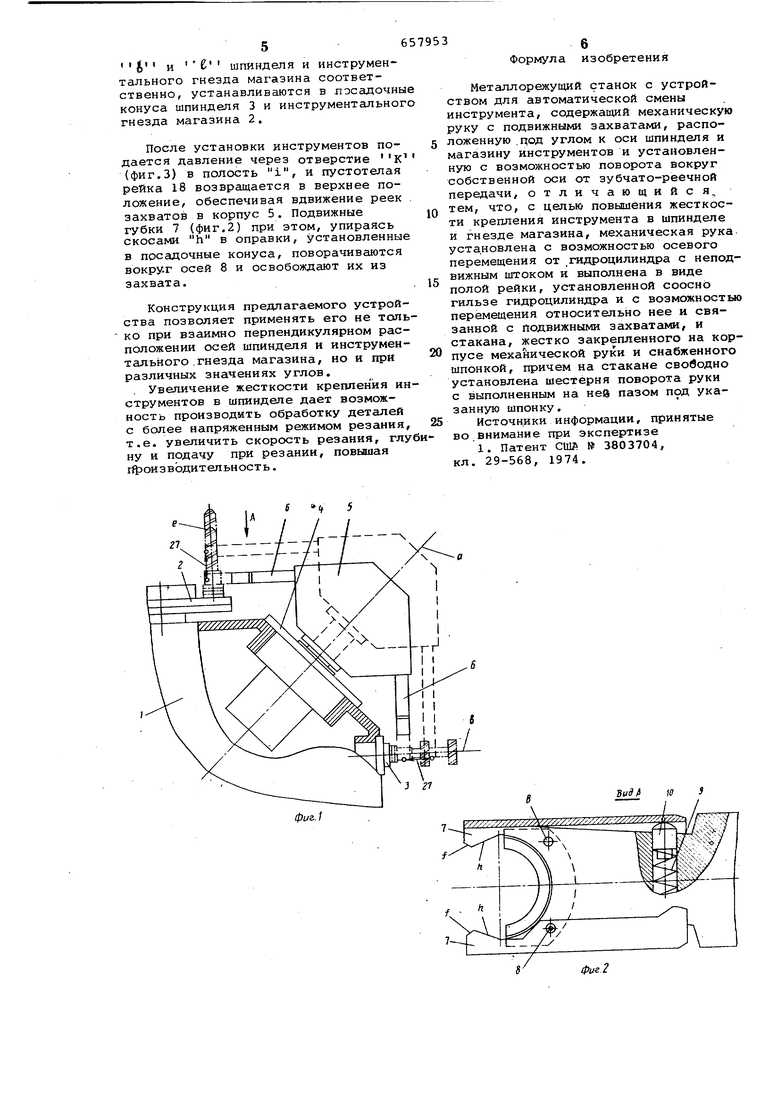
Изобретение относится к области станкостроения, в частности к вспомогательным устройствам, применяемым в многооперационных станках типа обрабатывающий центр при взаимно перпендикулярном расположении осей шпинделя и инструментсшьного магазина. Известен металлорежущий станок с устройством для автоматической смены инструмента, содержащий установленную на станке поворотную механическую руку с двумя рычагами, захватами имеющими возможность поворота относи тельно корпуса руки 1. Смена инструмента в известном станке осуществляется следующим образом. При подаче сигнала на- гидро систему срабатывгиот золотники, пере мещается рейка, поворачивающая.шестерни, жестко связанные с рычагами захватов поворотного корпуса механи ческой руки. При повороте рычагов захватов оправки инструментов снача ла выталкиваются из шпинделя и инструментального гнезда магазина, а затем захватывгиотся поворотными фиксаторами, упирающимися в специ. аЛьных канавках на буртах оправок. Рычаги с инструментами в захватах поворачиваются на угол, позволяющий извлечь оправки из посадочных конусов шпинделя и инструментального гнезда магазина, после чего корпус механической резки поворачивается на 180°. В связи с тем, что при извлечении и установке инстр Йентов траектории их движения представляют собой дуги окружностей с центрами на осях рычагов захватов, то условие входа и выхода оправок инструмептов из посадочных конусов шпинделя и инструментального гнезда магазина предопределяет укороченную длину сопряженных конусов и необходимость предварительного выталкивания оправок. Укороченная длина сопряженньж конусов снижает жесткость крепления оправок инструментов в шпинделе ij инструментальном гнезде магазина. Целью изобретения является повышение жесткости крепления инструмента в шпинделе за счет увеличения длины сопряженных конусов как оправки и шпинделя, так и оправки и инструментального гнезда магазина. Это достигается тем, что механическая установлена с возможностью осевого перемещения от гидроцилиндра с неподвижным штоком и выполнена в виде полой рейки, установленной соосно гильзе гидроцилиыдра и с возможностью перемещения относительно нее и связанной с подвижны№1 захватами, н стакана, жестко закрепленного на корпусе механической руки и снабженного шпонкой, причем на стакане свободно установлена шес терн5 поворота руки с выполненным на ней пазом под указанную шпонку. Прямолинейные движения инструментов имеют траектории на осях шгтнделя и инструментального гнезда-мага зина, что позволяет увеличить сопря.женную длину конусов и соответственно повысить жесткость крепления инст румента в шпинделе и инструментальном гнезде магазина. На фиг,1 изображено предлагаемое устройство, общий вид; на фиг.2 ви по стрелке и на фигЛ; на фиг.З механическая рука в разрезе; на фит.4 - разрез Б-Б на фиг.З на фиг разрез В-В на фиг.З; на фиг,б - раз рез Г-Г на фиг.З; На станине 1 СфигЛ) станка установлен магазин с инструментальными гнездами .2, шпиндель станка 3, неподвижный корпус 4 и поворотный корпус 5 механической руки с распол женными захватами б. Захваты б снабжены рейкам-i и имеют на концах подвижные губки 7 {фиг. 2), выполненные поворачивающимися вокруг осей 8 под действием пружины 9 через толкатель 10, Поворотныйкорпус руки 5 (фиг.З) с помощью винтов И соединен с пуст телым стаканом 12, несущим на конце шпонку 13. На пустотелом стакане 12 свободно посажена шестерня Г4, в па которой входит шпонка 13, Шестерня 14 находится в зацеплении с рейкой 15, которая при подаче давления в .отверстие S (фиг.4) перемещается до упора 16. В поворотном корпусе 5 (фиг.5) расположен блок шестерен 17/ у которого зубчатый венец входит в зацепление с пустотелой рейкой 18 имеющей возможность перемещения вдоль оси поворотного корпуса 5, а зубчатый венец п. через шестерню 19 связан с рейкой захвата 6. Рейки захватов 6 установлены в направляющих поворотного корпуса 5. Внутри пустотелой рейки 18 (фиг. соосно установлен гидроцилиндр, гил за 20 которого жестко связана с поворотным корпусом 5 через втулку 21 штифтами 22 и 23. Шток 24 гидроцилиндра с установленными в нем коаксиально трубками 25 и 26 закрепле в неподвижном корпусе 4. Пред;аагаемое устройство работает следующим образом. В исходном положении поворотный корпус 5 находится в нижнем положеИИ, пустотелая рейка 18 - в верхнем, ахваты 6 расположены внутри поворотного корпуса 5. При подаче давления через отверстие в полость д гидроцилиндра пустотелая рейка 18 перемещается вниз, поворачивает блоки шестерен 17, шестерни 19, которые перемещают соответственно рейки захватов 6. Подвижные губки 7 (фиг.2) захватов 6,соприкасаясь своими скосами f с поверхностями оправок инструментов, установленных в шпинделе 3 и инструментальном гнезде.магазина 2, поворачиваются вокруг осей 8, сжимая через толкатель 10 пружину 9, и захватывают оправки инструментов. После захвата оправок инструмента подается давление через отверстие т (фиг.З) и трубку 26 в полость под торцом втулки 21, в результате чего гильза 20 и жестко связанный с ней поворотный корпус 5 перемещается вверх. В результате перемещения поворотного корпуса 5 рейки захватов 6, связанных с пустотелой рейкой 18,. которая в данный момент неподвижна, через блоки шестерен 17 и шестерен 19 выдвигаются из поворотного корпуса 5, при этом траектории 27 (фиг.1) рабочих торцов захватов 6 параллельны осям § шпинделя и е инструментального гнезда магазина. Инструменты в захватах 6, перемещаясь, соответственно по осям |; и шпинделя 3 и инструментального гнезда магазина 2, выходят из посадочных конусов до положения, при котором возможен беспрепятственный поворот инструментов относительно оси поворотного корпуса 5. В крайнем верхнем положении поворотного корпуса 5 (-фиг.З) гильза 20 упрется в шток 24, а шпонка 13, препятствовавшая разв.ороту поворотного корпуса 5 при его перемещении войдет в паз шестерни 14, после чего давление поступает через отверстие S (фиг.4) в полость Р. Рейка 15 перемещается до упора 16 и поворачи.вает шестерню 14, связанную шпонкой 13 с пустотелым стаканом 12. Поворотный корпус 5, жестко связанный с пустотелым стаканом 12, поворачивается на 180 . После поворота корпуса 5 с инструментами в захватах 6 подается давление через отверстие С в полость t гидроцилиндра, в результате чего гильза 20 и связанный с ней поворотный ксэрпус 5 перемещаюогся вниз. В результате этого перемещения рейки захватов 6, связанные с пустотелой рейкой 18, которая в данный момент неподвижна, через блоки шестерен 17 и шестерни 19 вдвигаются в поворотный корпус 5. При этом инструменты в захватах 6, перемещаясь по осям 5 ji и С шпинделя и инструментального гнезда магазина соответственно, устанавливаются в лосадочны конуса шпинделя 3 и инструментальног гнезда магазина 2. После установки инструментов подается давление через отверстие К (фиг.З) в полость i, и пустотелая рейка 18 возвращается в верхнее положение, обеспечивая вдвижёние реек захватов в корпус 5. Подвижные губки 7 (фиг.2) при этом, упираясь скосами h в оправки, установленные в посадочные конуса, поворачиваются вокру.г осей 8 и освобождают их из захвата. Конструкция предлагаемого устройства позволяет применять его не толь ко при взаимно перпендикулярном расположении осей шпинделя и инструментального .гнезда магазина, но и при различных значениях углов. . Увеличение жесткости крепления ин струментов в шпинделе дает возможность производить обработку деталей с более напряженным режимом резания. т.е. увеличить скорость резания, глу ну и подачу при резании, повышая гфоизводительность. Формула изобретения Металлорежущий станок с устройством для автоматической смены инструмента, содержащий механическую руку с подвижными захватами, расположенную .под углом к оси шпинделя и магазину инструментов и установленную с возможностью поворота вокруг собственной оси от зубчато-реечной передачи, отличающийся, тем, что, с целью повышения жесткости крепления инструмента в шпинделе и гнезде магазина, механическая рука, уста.новлена с возможностью осевого перемещения от .гидроцилиндра с неподвижным штоком к выполнена в виде полой рейки, установленной соосно гильзе гндроцилиндра и с возможностью перемещения относительно нее и связанной с подвижными захватами, и стакана, жестко закрепленного на корпусе механической руки и снабженного шпонкой, причем на стакане свободно установлена шестерня поворота руки с выполненным на ней пазом под указанную шпонку. Источники информации, прин ятые во внимание при экспертизе 1. Патент CUtt № 3803704, кл. 29-568, 1974.
Фие.5
Г- г
гз
фиг.В
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для автоматической смены инструмента | 1982 |
|
SU1074700A1 |
| Устройство автоматической смены инструмента | 1986 |
|
SU1458145A1 |
| Устройство автоматической смены инструмента | 1983 |
|
SU1117182A1 |
| Устройство для автоматическойСМЕНы иНСТРуМЕНТОВ HA МЕТАллО-РЕжущЕМ CTAHKE | 1978 |
|
SU852163A3 |
| Устройство для автоматической смены инструмента и инструментальных головок на металлорежущем станке | 1987 |
|
SU1481026A1 |
| Захват для автоматической смены инструментальных оправок | 1978 |
|
SU703300A1 |
| Станок с устройством автоматической смены инструмента | 1987 |
|
SU1472209A1 |
| Многоцелевой станок с ЧПУ | 1985 |
|
SU1351739A1 |
| Устройство для автоматической смены инструмента | 1983 |
|
SU1135593A1 |
| Устройство для автоматической смены инструмента | 1989 |
|
SU1764940A1 |