(21)4433775/27-03
(22)31.05.88
(46) 15.03.90. Бюл. № 10
(72) П. И. Богатырев и В. Г. Смольников
(53) 621.867(088.8)
(56)Авторское свидетельство СССР № 86220, кл. В 65 G 13/06, 1946.
54) УСТРОЙСТВО ДЛЯ ПЕРЕМЕЩЕНИЯ ШТУЧНОГО ГРУЗА
(57)Изобретение относится к промышленному транспорту, в частности к роликовым конвейерам, и м. б. использовано для перемещения штучных изделий или материалов, веществ и изделий в ящиках. Цель - снижение энергоемкости устр-ва и уменьшение повреждения штучного груза при его перемещении. Устр-во включает неподвижную раму (HP) 1 с роликами 2, по опорной поверхности которых перемещают штучные грузы 3, и толкатели в виде сегментов 4. Последние закреплены на валу 5, связанном
с приводом его вращения. Прпзод выполнен в виде редуктора б и электродвигателя 7 с помощью цепной передачи 8. На HP 1 установлена подвижно упорная планка 9 для взаимодействия с грузом. Упорная планка 9 установлена с возможность продольного перемещения на двух параллельных направляющих (ПН) Н с помощью сегментов 4 и возвратной пружины 12. Одни концы ПН шарнирно закреплены на HP I, a другие подпружинены относительно нее с помощью пружины 14. При вращении сегментов 4 кулачок 13, закрепленный на валу 5, воздействует на ПН 1 и опускает их и упорную планку 9 в нижнее положение до тех пор, пока верхняя часть упорной планки 9 не окажется ниже верхнего уровня роликов 2 рольганга HP 1. При очередном обороте сегментов 4 второй и первый грузы 3 перемещаются в продольном правом направлении на расстояние ширины одного груза. 2 ил.
S
/
ЧЙЗЕДЗЭ
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для укладки штучных изделий в тару | 1987 |
|
SU1518203A1 |
| Накопительный рольганг | 1985 |
|
SU1283167A1 |
| Устройство для подачи штучных грузов на конвейер | 1976 |
|
SU621629A1 |
| Перегружатель штучных грузов | 1982 |
|
SU1022876A1 |
| УСТАНОВКА ДЛЯ УКЛАДКИ ШТУЧНЫХ ИЗДЕЛИЙ В КАРТОННЫЕ ЯЩИКИ | 1991 |
|
RU2005678C1 |
| Устройство для транспортирования и ориентирования деталей | 1988 |
|
SU1590422A1 |
| Устройство для укладки штучных изделий | 1982 |
|
SU1123941A1 |
| Устройство для упаковки штучных изделий в картонные коробки | 1986 |
|
SU1458279A1 |
| Перегрузочное устройство для штучных грузов | 1980 |
|
SU937284A1 |
| Устройство для разборки пакета штучных грузов | 1985 |
|
SU1350089A1 |
Изобретение относится к промышленному транспорту, в частности к роликовым конвейерам, и может быть использовано для перемещения штучных изделий или материалов, веществ и изделий в ящиках. Цель - снижение энергоемкости устройства и уменьшение повреждения штучного груза при его перемещении. Устройство включает неподвижную раму (НР) 1 с роликами 2, по опорной поверхности которых перемещают штучные грузы 3, и толкатели в виде сегментов 4. Последние закреплены на валу 5, связанном с приводом его вращения. Привод выполнен в виде редуктора 6 и электродвигателя 7 с помощью цепной передачи 8. На НР 1 установлена подвижно упорная планка 9 для взаимодействия с грузом. Упорная планка 9 установлена с возможностью продольного перемещения на двух параллельных направляющих (ПН) 11 с помощью сегментов 4 и возвратной пружины 12. Одни концы ПН шарнирно закреплены на НР 1, а другие подпружинены относительно нее с помощью пружины 14. При вращении сегментов 4 кулачок 13, закрепленный на валу 5, воздействует на ПН 11 и опускает их и упорную планку 9 в нижнее положение до тех пор, пока верхняя часть упорной планки 9 не окажется ниже верхнего уровня роликов 2 рольганга НР 1. При очередном обороте сегментов 4 второй и первый грузы 3 перемещаются в продольном правом направлении на расстояние ширины одного груза. 2 ил.
4 13 5
sT8) flo)E5J {pT TaЈog
/ / , ч
1 № 2
.-, .-. Л. ..-.-. /.... - А То) (о) ЕЙ сол вдПоПкг
.- -I-Til - Т|
77
эв&
Изобретение относится к промышленному транспорту, в частности к роликовым конвейерам, и применяется для перемещения штучных изделий или материалов, веществ и изделий в ящиках.
Цель изобретения - снижение энергоемкости устройства и уменьшение повреждения штучного груза при его перемещении.
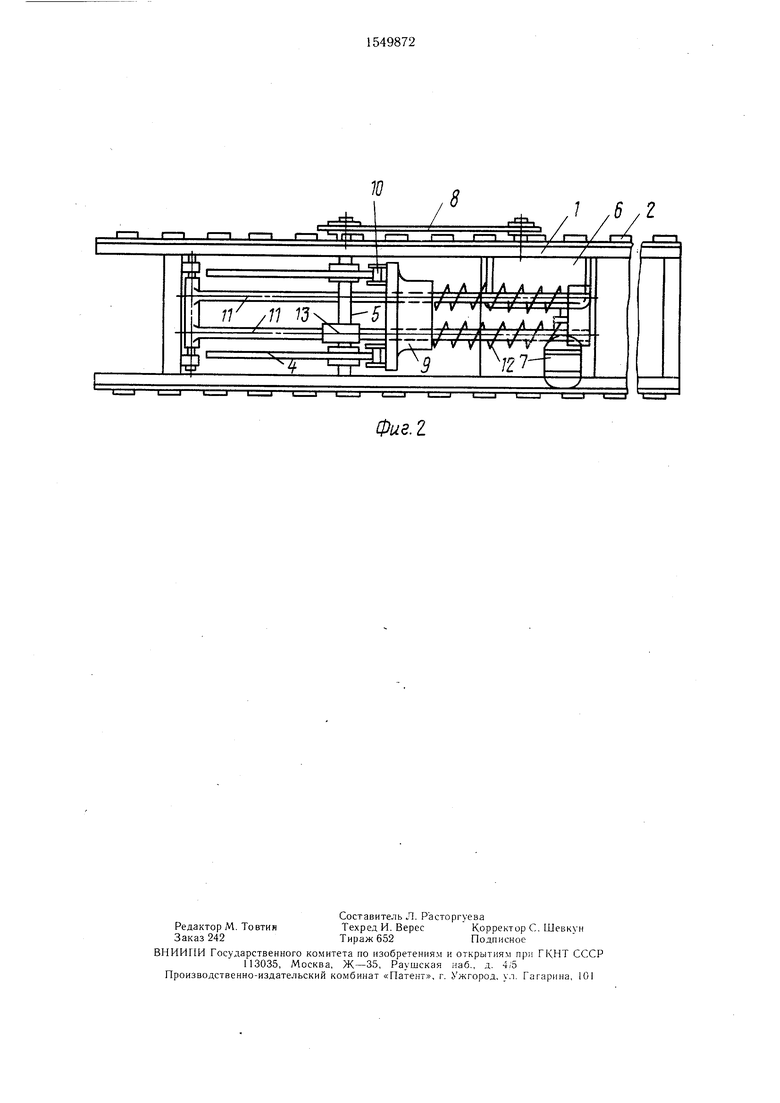
На фиг. 1 изображено устройство, вид сбоку; на фиг. 2 - то же, вид в плане.
На неподвижной раме 1 закреплены ролики 2, по опорной поверхности которых перемещают штучные грузы 3. На раме 1 установлены с возможностью вращения по часовой стрелке два или большее число толкателей, выполненных в виде сегментов 4 (фиг. 1), жестко закрепленных одной стороной на горизонтальном валу 5, связанном с приводом его вращения в виде редуктора 6 и электродвигателя 7 с помощью цепной передачи 8 или пары зубчатых колес. На неподвижной раме 1 установлена подвижно упорная планка 9 для взаимодействия с грузом с двумя роликами 10. Упорная планка 9 установлена с возможностью продольного перемещения на двух параллельных направляющих 11 с помощью сегментов 4 и возвратной пружины 12. На валу 5 жестко закреплен кулачок 13. Одни концы направляющих 11 шарнирно закреплены на неподвижной раме 1, а другие подпружинены относительно нее с помощью пружины 14. Ролики 10 закреплены на упорной планке 9, расположенной с возможностью взаимодействия с сегментами 4. Кулачок 13 установлен с возможностью взаимодействия с направляющей для расположения упорной планки ниже опорной поверхности для штучного груза 3.
Устройство работает следующим образом.
Штучный груз 3 укладывается с помощью манипулятора или штабеллера на левую по фиг. 1 сторону рольганга рамы 1. Затем включают электродвигатель 7, после чего начинают вращаться по часовой стрелке сегменты 4 с определенной частотой вращения с помощью редуктора б, цепной передачи 8 и вала 5.
В тот момент, когда сегменты 4 окажутся в нижнем положении, а упорная планка 9 под воздействием кулачка 13 на направляющую 11 опустится вниз ниже уровня роликов 2 рольганга, оператор перемещает груз 3 по рольгангу рамы 1 в правую по фиг. 1 сторону таким образом, чтобы при дальнейшем вращении сегментов 4-упорная планка 9 могла захватить груз 3 и пе- реместить его по рольгангу в правую сторону на величину, равную размеру радиуса окружности, описываемой наиболее удаленной точкой на сегментах 4.
Упорная планка 9 перемещается в продольном направлении по направляющим 11 под воздействием усилий рабочих поверхностей толкателей-сегментов 4, взаимодействующих с роликами 10 (фиг. 2) упорной планки 9.
При дальнейшем вращении сегментов 4 по часовой стрелке, в момент их опускания в нижнее положение кулачок 13 начинает воздействовать на направляющие 11 и упорную планку 9, опуская их в нижнее положение до тех пор, пока верхняя часть упорной планки 9 не окажется ниже верхнего уровня роликов 2 рольганга рамы 1.
В этот момент на рольганг рамы 1 с помощью манипулятора или штабеллера укладывается второй груз 3 на правую сторону от оси вала 5, вплотную к первому грузу 3. При очередном обороте сегментов 4 второй и первый грузы 3 переместятся в продольном правом направлении на расстояние ши0 рины одного груза.
Аналогичным образом происходит перемещение по рольгангу очередных третьего, четвертого и т. д. груза на длину 50, 100 и более метров, в зависимости от необхоg димости.
Повреждение груза при этом не происходит потому, что площадь контакта груза 3 с упорной планкой 9 достаточно велика, а удельное давление на единицу площади 0 значительно меньше. При этом, в момент перемещения груза отсутствует трение скольжения между рабочими поверхностями сегментов и небольшими контактными поверхностями груза.
35
Формула изобретения
Устройство для перемещения штучного груза, содержащее неподвижную раму с опорной поверхностью для штучного груза,
толкатель в виде закрепленных на валу двух сегментов и привод вращения вала, отличающееся тем, что, с целью снижения энергоемкости устройства и уменьшения повреждения штучного груза при его перемещении, оно снабжено двумя параллельными
направляющими, одни концы которых шарнирно закреплены на неподвижной раме, а другие подпружинены относительно нее, установленной на направляющих подпружиненной к сегментам упорной планкой для взаимодействия с грузом, расположенными на упорной планке с возможностью взаимодействия с сегментами двумя роликами и закрепленным на валу кулачком, установленным с возможностью взаимодействия с направляющей для расположения планки
ниже опорной поверхности для штучного груза.
фие.1
