1
Изобретение относится к промышленному транспорту и может быть использовано в различных отраслях народного хозяйства на транспортных операциях, где требуется распределение штучных грузов на конвейер с высоким ритмом работы.
Известно устройство для подачи изделий с рольганга на конвейер, содержащее механизм для переталкивания груза, расположенный между роликами рольганга и выполненный в виде шарнирного четырехзвенника. Цикл работы - подъем груза, снятие с рольганга, подача на конвейер и опускание на него 1.
Однако такое устройство сложно по конструкции.
Известно устройство для передачи грузов на конвейер, включающее загрузочную позицию в виде конвейера и механизм передачи груза, выполненный в виде расположенного под загрузочной позицией толкателя с собачкой и подвижного поддона с поворотным рычагом под ним, взаимодействующим с собачкой, и неподвижные планки 2.
Однако такая конструкция не обеспечивает подачу штучных грузов на конвейер с высоким ритмом работы.
Целью изобретения является механизация процесса возврата грузила в исходное
положение и обеспечение утапливания собачки при обратном ходе.
Это достигается тем, что устройство снабжено роликом, а рама - винтовым направляющим путем с возможностью перемещения по нему ролика, при этом стол, поддон и рама выполнены с продольным пазом для захода собачки, а рама снабжена плоской пружиной и отклоняющим упором.
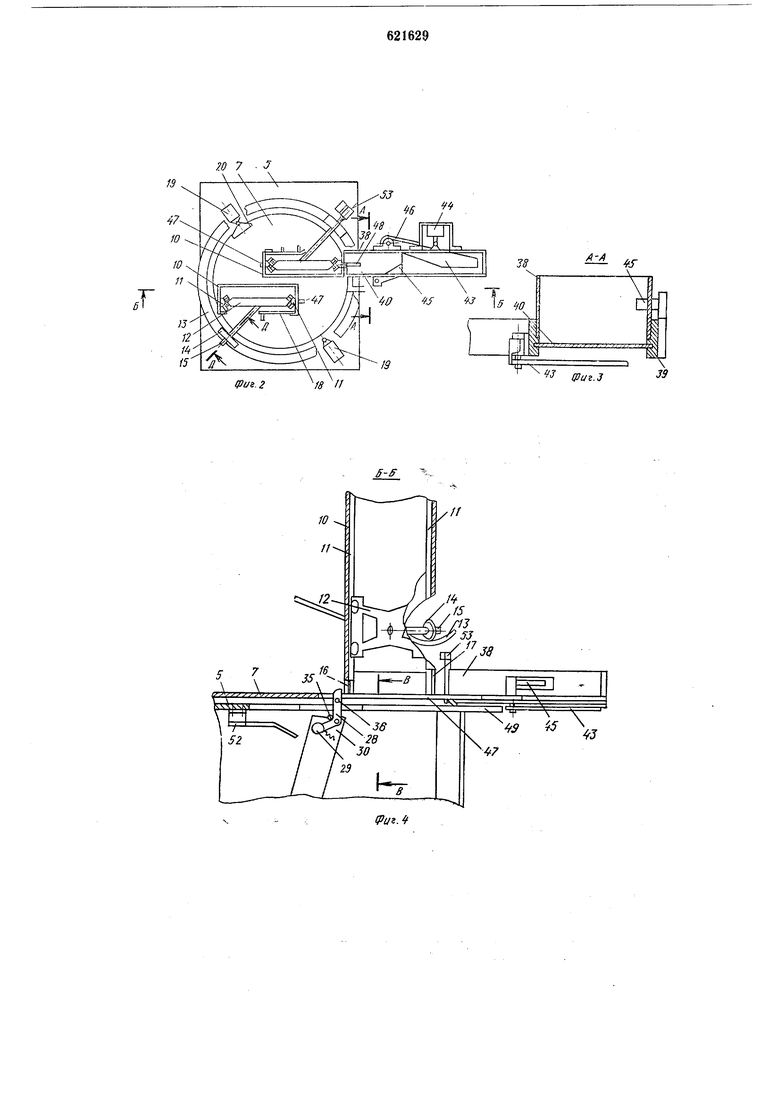
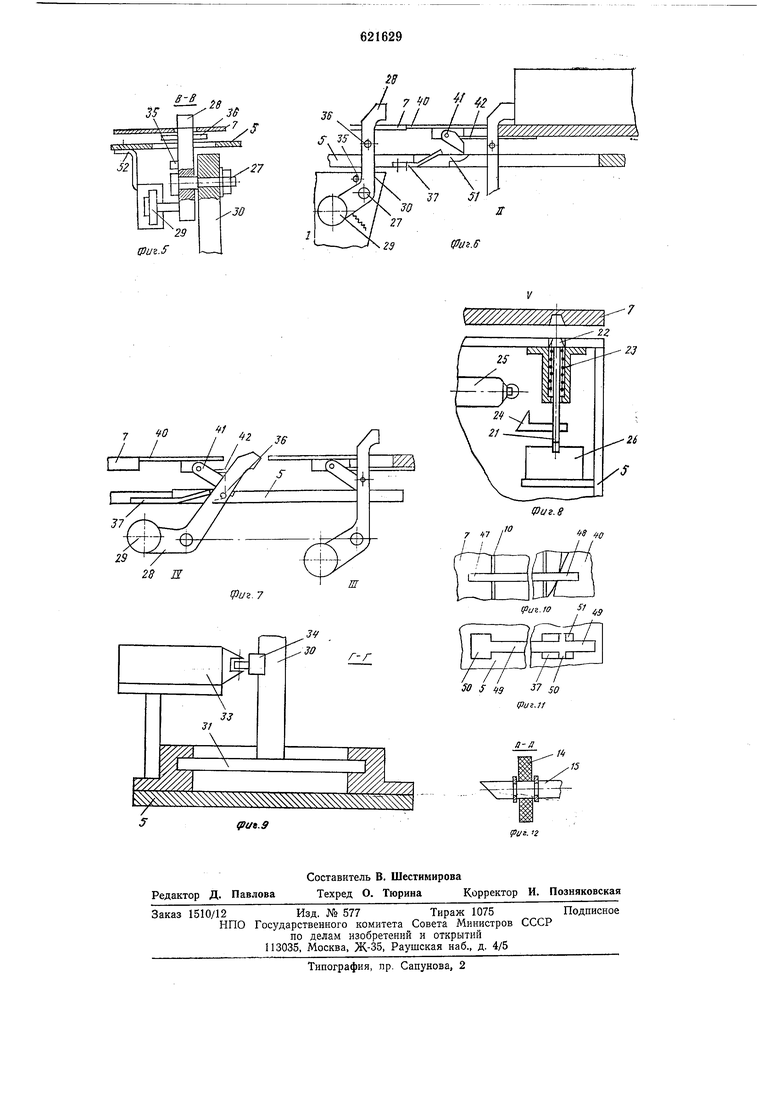
На фиг. 1 изображено описываемое устройство, общий вид; на фиг. 2 --то же, в плане; на фиг. 3 - разрез А-А на фиг. 2; на фиг. 4 - разрез Б-Б на фиг. 2; на
фиг. 5 - разрез В-В на фиг. 4; на фиг. 6- положение I - перемещение собачки при прямом ходе; положение II - взаимодействие собачки с поддоном и их совместное перемещение в крайнее правое положение;
на фиг. 7 - положение III - обратный ход собачки вместе с поддоном; положение IV- переход собачки в исходное (горизонтальное) положение; на фиг. 8 - узел V на фиг. 1; на фиг. 9 - разрез Г-Г на фиг. 1;
на фиг. 10 - расположение пазов на поворотном столе и поддоне; на фиг. 11 - расположение пазов на раме; на фиг. 12 - разрез Д-Д на фиг. 2. Устройство содержит загрузочный механизм 1, механизм 2 передачи груза с загрузочной позиции и механизм 3 сбрасывания груза на конвейер 4.
Загрузочный механизм выполнен в виде расположенного на раме 5 поворотного на оси 6 стола 7 с приводом через коническую пару 8 от мотора-редуктора 9. На столе 7 подвижно закреплены вертикально две кассеты 10, внутри которых расположены направляющие И для перемещения грузила 12, а к раме 5 закреплен винтовой направляющий путь 13 для перемещепия по нему ролика 14, расположенного на оси 15 грузила 12. В передней стенке кассеты 10 имеется паз 16, а в задней стенке - паз 17 для выхода груза. Для загрузки кассеты имеется дверца 18 с фиксатором, а для управления мотором-редуктором 9 служат закрепленные на раме 5 два конечника 19 положения, управляемые от упора 20, расположенного на столе 7. На раме 5 закреплен узел фиксации (см. рис. 8), содержащий расположенные на оси 21 фиксатор 22 с пружиной 23, кулачок 24, управляющий конечным выключателем 25. Для фиксации стола служит электромагнит 26.
Механизм передачи груза из кассеты 10 расположен под столом 7 и содержит подпружиненную поворотную на оси 27 собачку 28 с роликом 29. Собачка закреплена на кронщтейне 30, который установлен на ползуне 31 пневмоцилиндра 32, закрепленного на раме 5.
Пиевмоцилиндр управляется конечниками 33 от кулачка 34, закрепленного на кронщтейне 30 (см. фиг. 9).
Собачка 28 снабжена ограничителем 35 и симметрично расположенными упорами 36, взаимодействующими с плоскими пружинами 37, закрепленными на раме 5.
Последовательно со стола 7 на одном с ним уровне на раме закреплен корпус 38 (см. фиг. 1-3) механизма сброса, содержащего подвижный по направляющим 39 поддон 40, на котором закреплены симметрично поворотные упоры 41, подпружиненные плоской пружиной 42 (см. фиг. 6 и 7). Параллельно поддону 40 расположено подвижное дно 43, управляемое электромагнитом 44. На корпусе 38 закреплены подпружиненный отсекатель 45 и плоская пружина 46 для возврята дна 43 в исходное положение.
В поворотном столе 7 (см. фиг. 2, 10 и 11) для прохода собачки 28 выполнен продольный паз 47, в поддоне 40 - паз 48, а в раме 5 - паз 49. Для прохождения упоров собачки 28 в раме 5 имеется паз 50 и углубление 51.
Для обеспечения горизонтального положения собачки 28 кри обратном ее ходе на раме закреплены плоская прулшна 37 (см. фиг. 7) и отклоняющий упор 52. Для сигнализации наличия тары в кассете на раме 5 закреплен конечник положения 53, срабатывающий от оси IS.
Устройство работает следующим образом,
В исходном пололсении кассеты 10 не загружены, собачка 28 занимает горизонтальное положение (см. фиг. 1), поворотный стол 7 зафиксирован.
Оператор открывает дверцу 18 кассеты, закладывает в нее распределяемый груз, фиксирует дверцу и нажимает кнопку «Поворот стола. Включается мотор-редуктор 9, и стол 7 поворачивается, так как одновременно электромагнит 26 втягивает фиксатор 22 (см. фиг. 8). Грузило 12 поджимает распределяемый груз в кассете 10. Стол 7 поворачивается до тех пор, пока упор 20 не замкнет конечный выключатель 19. Мотор-редуктор и электромагнит 26 выключаются, фиксатор 22 входит в паз стола 7. При этом паз 47 располагается точно над пазом 49 в раме.
Кулачок 24 воздействует на выключатель 25 и включает в работу пневмоцилиндр 32.
Шток ппевмоцилипдра вместе с ползуном 31 перемещает кронщтейн 30, ролик 29 схоДит с упора 52, а собачка, перемещаясь вправо под действием пружины, входит в пазы 47 и 49 стола и рамы соответственно и занимает вертикальное положение (см. фиг. 6), что фиксируется ограничителем 35. Продвигаясь далее, собачка 28 через пазы 16 и 17 выдвигает груз на поддон 40 и проходит в его паз 48.
Упоры 36 собачки отклоняют упоры 41 поддона, которые затем пружиной 42 возвращаются в исходное положение.
Собачка 28 упирается в поддон 40 и перемещает его вместе с грузом в крайнее правое положение. Отсекатель 45 (см.
фиг. 2) при прохождении груза отклоняется, а затем под действием пружины возвращается в исходное положение, препятствуя перемещепию груза влево при обратном ходе поддона 40.
Далее при взаимодействии кулачка 34 и конечника 33 (см. фиг. 9) щток пневмоцилиндра движется в обратном направлении, и собачка перемещается влево. Упоры 36 захватывают поддон 40 за упоры 41 и перемещают его до упора в поворотный стол (см. фиг. 7) в исходное положение. Плоская пружина 37 не позволяет собачке занять вертикальное положение.
При движении поддона 40 влево отсекатель 45 задерживает груз, и он падает на подвижное дно 43, кулачок 34, воздействуя на конечник 33, дает разрещение на сброс груза. Электромагнит 44 поворачивает дно 43, и груз падает на конвейер. Возвращение подвижного дна в исходное положение осуществляется плоской пружиной 46 при обесточенном электромагните 44.
Двигаясь влево под столом, собачка занимает горизонтальное положение, которое
сохраняется за счет «заимодействия упора
52 с роликом 29 (см. фиг. 4). Далее цикл повторяется.
При выдвижении из кассеты последнего груза ось 15 ролика 14 воздействует на конечник 53 и подает сигнал, ролик 14 грузила 12 переходит на направляющий путь 13 и возвращает его в исходное положение (см. фиг. 1).
Во время распределения изделий из загружаемой кассеты оператор загружает следующую кассету в том же порядке.
Формула изобретения
1. Устройство для подачи щтучных грузов на конвейер, включающее расположенные на раме загрузочный механизм, содержащий поворотный стол с кассетами, на направляющих которых установлено грузило, механизм передачи груза, выполненный в виде расположенного под загрузочным механизмом толкателя с собачкой, и механизм
сбрасывания груза, имеющий подвижной поддон с поворотным упором под ним, взаимодействующим с собачкой, отличающееся тем, что, с целью механизации процесса возврата грузила в исходное положение, оно снабжено роликом, а рама - винтовым направляющим путем с возможностью перемещения по нему ролика, при этом стол, поддон и рама выполнены с продольным пазод1 для захода собачки.
2. Устройство по п. 1, отличающееся тем, что, с целью обеспечения утапливания собачки при обратном ходе, рама снабжена плоской пружиной и отклоняющим упором.
Источники информации, принятые во внимание при экспертизе 1. Авторское свидетельство СССР № 259677, кл. В 65G 47/06, 1967. 2. Авторское свидетельство СССР № 213661, кл. В 65G 47/54, 1966.
IX/
J /// / /
ШГ
.Г
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для загрузки тележечного конвейера | 1976 |
|
SU659479A1 |
| Шаговый конвейер-накопитель | 1976 |
|
SU829501A1 |
| Устройство для загрузки тележечного конвейера | 1975 |
|
SU659478A1 |
| Устройство для упаковки пакета изделий | 1980 |
|
SU943108A1 |
| Устройство для загрузки и разгрузки стеллажей | 1986 |
|
SU1399226A1 |
| Транспортно-складская система | 1986 |
|
SU1370032A1 |
| Перегрузочная тележка проходного стеллажа | 1981 |
|
SU998244A1 |
| Устройство для комплектации печатной корреспонденции | 1989 |
|
SU1678462A1 |
| УСТРОЙСТВО ДЛЯ ПОШТУЧНОЙ ВЫДАЧИ ИЗДЕЛИЙ ИЗ СТОПЫ | 1990 |
|
RU2006436C1 |
| ПОДЪЕМНО-ТРАНСПОРТНОЕ ОБОРУДОВАНИЕ КОМПЛЕКСА ТЕРМООБРАБОТКИ КЕРАМИЧЕСКИХ ИЗДЕЛИЙ И КАССЕТА ДЛЯ ТРАНСПОРТИРОВКИ КЕРАМИЧЕСКИХ ИЗДЕЛИЙ | 2013 |
|
RU2526572C1 |

ft
3
