В настоящее время при испытании мостов динамической нагрузкой пользуются преимущественно двумя приемами. Первый состоит в прокатке паровоза по строению моста, второй в ударном действии груза, падающего с некоторой высоты. Оба эти способа несовершенны и неудобны. Кроме того, они не позволяют в требуемых широких пределах менять момент, вызывающий колебания фер1ч моста, а также и не позволяют менять пи своему произволу направление нагрузки, между тем при испытаниях требуется иметь возможность приложения -нагружающей силы в любых направлениях как в горизонтальной, так и вертикальной плоскостях. Предлагаемое изобретение касается вибрационной машины для испытания мостов динамической нагрузкой и состоит в конструктивном ее выполнении, при котором имеется воз;можность давать нагрузку пульсирующей силой с широко изменяющимися пределами частоты как в горизонтальном, так и в вертикальной плоскостях.
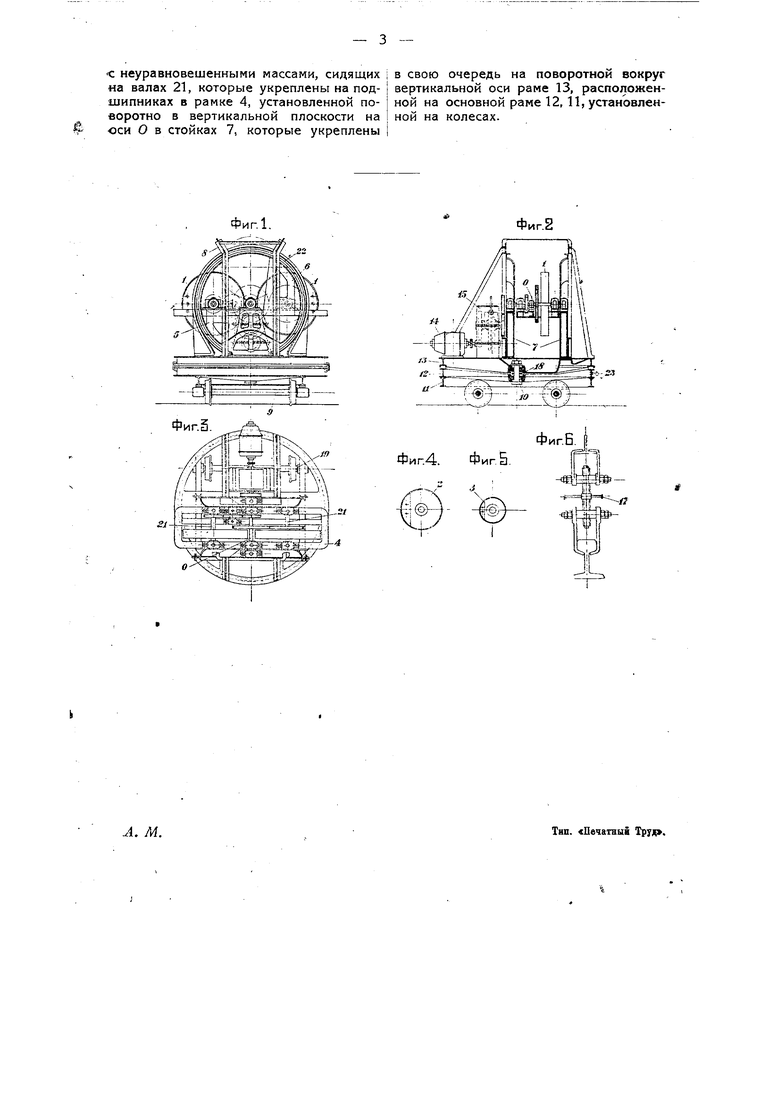
На чертеже фиг. 1 изображает вид машины спереди; фиг. 2-вид ее сбоку с частичным разрезом; фиг. 3 - вид сверху и фиг. 4, 5, б - отдельные части машины.
Основная рама 12,11 машины состоиг из двух отдельных рам, скрепленных между собой наглухо. К нижней раме 11 из двутаврового железа наглухо прикреплены четыре буксы 19, служащие подшипниками для двух осей 9 с колесами. Таким образом, вся вибрационная машина, поставленная на эту раму может свободно катиться по рельсам. Вторая промежуточная рама 12, имеющая двутавровое сечение, в горизонтальной плоскости представляет собою круг; в центре ее имеется втулка, соединенная с ободом рамы плоскими спицами. На раме 12 установлена поворотная рама 13, которая на катках, помещенных в особых гнездах в нижней части ее обода может поворачиваться по кругу рамы 12 около оси основного болта 10 на 360°. Рама 13 также имеет в центре втулку, опирающуюся на «пяту 18 и соединенную с ободом плоскими спицами, на которых поставлена сама вибрационная машина. Пята 18 помещена между втулками рам 12 и 13. На поворотной раме 13 установлены стойки 7, коробка скоростей 15 и электродвигатель 14. На стойках 7 укреплены два коренных подшипника, поддерживающие ось О, на которой подвешена поворотная рамка 4 с подшипниками, несущими валы 21 двух маховиков 1,1 с неуравновешенными массами. Смотря по необходимости можно получить то или иное значение пульсирующей силы, сменив маховики 1, 1 на маховики 2 или 3 (фиг. 4 или 5). Рамка 4 может поворачиваться около оси О на 90°. От оси О имеются две зубчатые передачи к левому маховому колесу через три зубчатых колеса и к правому через два зубчатых колеса (фиг. 3). Благодаря этому певый и правый маховики вращаются в разные стороны. На этих маховиках укреплены неуравновешенные грузы, имеющие форму сегментов, во взаимно противоположных частях обоих маховиков, чем и достигается неуравновешенность их масс. При вращении маховиков, действующая сила изменяется от минимального значения, в вертикальном направлени вверх до максимального значения, действующего по вертикальному направлению вниз. Благодаря возможности вращения рамы 13 на 360° около оси болта 10 и вращения рамки 4 на 90° около оси О сила, развиваемая от вращения двух маховиков с неуравновешенными грузами может быть направлена в любом направлении. На рамке 4 имеются два подшипника для оси О, два подшипника, несущие ось левого махового колеса, два подшипника, несущие ось правого маховика и два подшипника, несущие ось промежуточного зубчатого колеса, передающего вращение от оси О к левому маховику. Кроме того рамка 4 имеет поручни для ее перемещения. Для возможности укрепления рамки 4 в разных положениях к ней прикреплены два крыла 5 и б, имеющие буртики корытообразного сечения с проемами через которые продеваются болты. Эти болты : другой стороны продеваются в круговой :паз особого кольца 22, укрепленного вертикально, прикрепленного к стойке коренных подшипников и,кроме того к раскосам 8 из углового и корытного железа. Раскосы прикреплены к подвижной раме 13 и соединены между собой растяжкой.
Установка рамки 4 в любое положение по отношению к горизонтальной линии производится следующим образом: освобождаются болты, прикрепляющиекрылья рамки 4 к кольцу, затем рамка 4 ставится в требуемое положение и болты зажимаются. Вибрационная машина приводится в действие от электромотора 14 через коробку скоростей 15. На хвостовике вала О HacafkeHO зубчатое колесо, находящееся в зацеплении с другим зубчатым колесом, насаженным на хвостовик вала коробки скоростей 15. Коробка скоростей имеет три ступени скоростей, выбираемых в соответствии с необходимыми скоростями маховиков. Включение ступеней производится /помощью трех фрикционных муфт, управляемых одной рукояткой помощью эксцентриков. Ведущая ось коробки скоростей соединяется помощью жесткой муфты с электродвигателем -14. Корпус коробки скоростей состоит из трех литых частей, позволяющих удобно разбирать муфту. Установлена коробка скоростей на двух швеллерах, прикрепленных к раме 13. Для привода вибрационной машины может быть применен сериесный электродвигатель, ПОЗВОЛЯЮЩИЙ быстро разогнать маховики до потребного числа оборотов. Когда потребное число оборотов достигнуто требуется по возможности быстро остановить вибрационную машину. Для этой цели отсоединяется питание электродвигателя от источника тока. Далее маховики по инерции будут вращать электродвигатель, как генератор постоянного тока. Развиваемая энергия двигателя, работающего как генератор, поглощается сопротивлением. Для большего эффекта при этом магниты генератора получают независимое возбуждение, так что торможение имеет эффект при самых низких скоростях. Для укрепления вибрационной машины имеются захватки 17, при помощи которых рама 11 закрепляется на головке рельса. Захватка эта выполнена по типу вагонной стяжки с особыми серьгами для охватывания ими двутавровой балки рамы 11 и головки рельса. Для перемещения машины по рельсам имеется крюк 23.
Предмет патента.
Вибрационная машина для испытания мостов динамической нагрузкой, характеризующаяся применением привол,имых во вращение электродвигателем 14 через коробку скоростей 15 двух маховиков 1, 1
с неуравновешенными массами, сидящих | в свою очередь на поворотной вокруг на валах 21, которые укреплены на под- | вертикальной оси раме 13, расположеншипниках в рамке 4, установленной поворотно в вертикальной плоскости на оси О в стойках 7, которые укреплены
ной на основной раме 12,11, установленной на колесах.
4
фЛЧ
Фиг.З.
fff
/Ш4
CY
lt Tr TnfHrftttvcV
т I Y
pJilJT:d --
.м/
г/ФигБ. I
Фиг 5.
J
-/

