1
. J) 4412913/31-15
(22) 19.04.88
46) 07.04.90. Бюл. ff lj
(71)Ленинградский сельскохозяйственный институт
(72)А.Б.Лурье, Е.А.Абелев,
И.З.Теплинский, Б.И.Цеткин и В.М.Сало (53) 631.358.458(088.8) 56) Авторское свидетельство СССР 1094587,кл. А 01 В 63/1 U, 19P4.
ч
1.УО УСТРОЙСТВО ДЛЯ РЕГУЛИРОВАНИЯ ГЛУБИНЫ ХОДА РАБОЧИХ ОРГАНОВ СЕЛЬСКОхозяйг.гвенных МАШИН и ОРУДИЙ
(S7) Изобретение относится к сельскохозяйственному машиностроению и предназначено для автоматического оперативного контроля и управления глубиной хода рабочих органов сельскохозяйственных машин. Цель изобретения - повышение точности регулирования. Устройство содержит датчик 1 глубины хода рабочих органов, вычислительный
блок 2, блок 3 памяти, информационный блок 7, блок 8 дешифрации. Блок 10 сравнения соединен с блоком 9 рассогласования. Задающий блок 5 связан датчиком 4 пути и датчиком-эталоном 6. Исполнительный механизм I1 осугаеств- лчет регулирование глубины хода рабочих трганоп. При обработка почты гэ;т- ш е о г датчиков 1,6 чсре соответствующие блоки в вычгслител - ный блок 2 и блок 10 сравнения. По поп ученным сигналам въ.рабтгыряется управляюпр й сигнал для нгформнропа- ггня тракториста о глуби;гр и для подрегулировачия глубины чодл рабочих органов через испотнительньй 1 1 , вочдейству« п ий ча механизм регулирования и установки заданной глубины. В случае нахождения технологичес- Р го процесса в поле допуска соотв - яырабатт.шаетгя сигнал, информирующий о нормальном ходе процесс1-. и ил.
SP

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для контроля и регулирования рабочего режима картофелепосадочной машины | 1988 |
|
SU1528360A1 |
| УСТРОЙСТВО АВТОМАТИЧЕСКОГО КОНТРОЛЯ ГЛУБИНЫ ХОДА РАБОЧИХ ОРГАНОВ СЕЛЬСКОХОЗЯЙСТВЕННЫХ МАШИН | 2005 |
|
RU2309567C2 |
| УСТРОЙСТВО ДЛЯ УПРАВЛЕНИЯ РАСХОДОМ КЛУБНЕЙ КАРТОФЕЛЕПОСАДОЧНОЙ МАШИНЫ | 1991 |
|
RU2034430C1 |
| Устройство контроля глубины хода рабочих органов сельскохозяйственных машин | 1987 |
|
SU1440374A1 |
| Способ автоматического управления технологическим процессом зерноуборочного комбайна | 1986 |
|
SU1720545A1 |
| Угломерная радионавигационная система автовождения машинно-тракторного агрегата | 1988 |
|
SU1630625A1 |
| Устройство для контроля процесса высева семян | 1988 |
|
SU1544227A1 |
| СЕЛЬСКОХОЗЯЙСТВЕННЫЙ КОМПЛЕКС С СИСТЕМОЙ УПРАВЛЕНИЯ И НАПРАВЛЕНИЯ МАНЕВРОВ И СПОСОБ, ОСУЩЕСТВЛЯЕМЫЙ ТАКИМ КОМПЛЕКСОМ | 2016 |
|
RU2720936C2 |
| Устройство для контроля и управления расходом рабочей жидкости в штанговых опрыскивателях | 1990 |
|
SU1739938A1 |
| Способ автоматического регулирования длины шпагата для обвязки тюка и устройство для его осуществления | 1990 |
|
SU1743462A1 |

Изобретение относится к сельскохозяйственному машиностроению и предназначено для автоматического оперативного контроля и управления глубиной хода рабочих органов сельскохозяйственных машин. Цель изобретения - повышение точности регулирования. Устройство содержит датчик 1 глубины хода рабочих органов, вычислительный блок 2, блок 3 памяти, информационный блок 7, блок 8 дешифрации. Блок 10 сравнения соединен с блоком 9 рассогласования. Задающий блок 5 связан с датчиком 4 пути и датчиком-эталоном 6. Исполнительный механизм 11 осуществляется регулирование глубины хода рабочих органов. При обработке почвы данные от датчиков 1,6 поступают через соответствующие блоки в вычислительный блок 2 и блок 10 сравнения. По полученным сигналам вырабатывается управляющий сигнал для информирования тракториста о глубине хода и для подрегулирования глубины хода рабочих органов через исполнительный механизм 11, воздействующий на механизм регулирования и установки заданной глубины. В случае нахождения технологического процесса в поле допуска соответственно вырабатывается сигнал, информирующий о нормальном ходе процесса. 6 ил.
От
(ся
Јь J
ро
се
д,-л-1-гаА,
Фие.1
Изобретение относится к сельскому хозяйству, а именно к сельскохочяйст- вснчому машиностроению.
Цель изобретения - повышение точности регулирования.
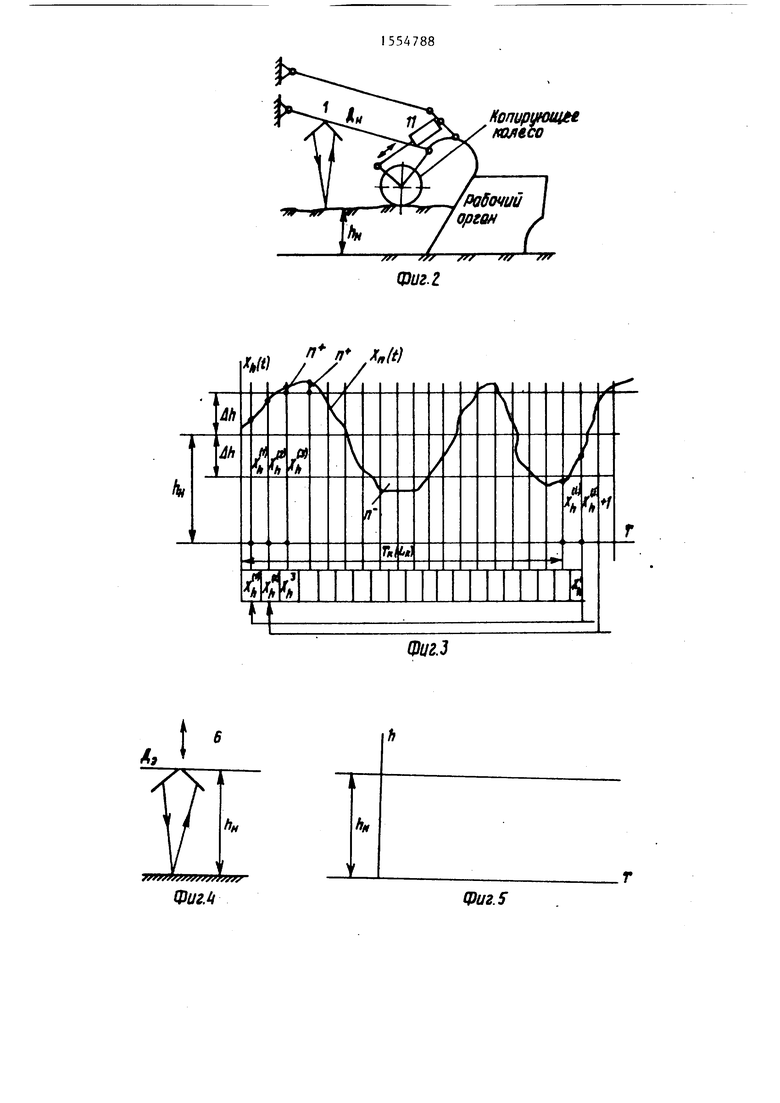
На фиг.1 представлена блок-схема устройства; на фиг.2 - принципиальная схема рабочего органа сельскохозяйственной машины с датчиком глубины его хода; на фиг.3 - временная диаграмма работы устройства; на фиг.А - схема датчик-эталона; на фиг.5 - временная диаграмма выходного сигнала датчик-эталона; на фиг.6 - временная диаграмма работы устройства.
Устройство содержит датчик 1 глубины хода рабочих органов, соединенный с первым входом вычислительного блока 2 через блок 3 памяти, и датчик 4 пути, первым выходом подключенный к второму входу вычислительного бло- ка 2. При этом вторым выходом датчик 4 пути связан с входом задающего блока 5 и вторым входом блока 3 памяти. Первый и второй выходы задающего блока 5 соединены с третьим и четвертым вводами вычислительного блока 2, а третий выход - с датчиком 1 глубины хода- рабочего органа через последовательно соединенный датчик-эталон 6. Первый выход вычислительного блока 2 связан с информационным блоком 7 через блок 8 дешифрации, а второй выход - через блок 9 рассогласования с блоком 10 сравнения, на второй вход которого поступает с второго выхода датчика-эталона 6. Выход блока 10 сравнения связан с входом исполнительного механизма 11 регулирования глубины хода рабочих органов.
В качестве датчика-эталона 6 может быть использован любой бесконтактный датчик - радиоволновой, ультразвуковой, радиочастотный, лазерный и т.д. Исполнительный механизм 11 может быть выполнен либо в виде гидроцилиндра, либо в виде электродвигателя, воздействующего на механизм настройки глубины хода рабочего органа.
Устройство для регулирования работает в двух режимах.
Режим Настройка предназначен для определения правильности регулировки и настройки глубины хода рабочих органов. В этом периоде с шагом Д1(Д1:) в блок 3 памяти записываются текущие значения глубины хода рабочего органа Хп (каждое значение записывается
0
5
0
5
0
5
0
5
0
в соответствующий регистр памяти), а по окончании контрольного времени Тк (пути LR оцениваются качество настройки рабочих органов на заданную v глубину в виде оценки текущей вероятности PT(t ) (формулы 1,3 и 6). При соответствии заданным значениям контролируемого процесса устройство из режима Настройка переходит в автоматический режим Работа. В этом случае массив данных, хранящийся в блоке 3 памяти, сохраняется, а последующее значение Х, поступающее от датчика- 1 глубины через интервал Д1 (At) поступает в регистр.
При начале движения датчик 4 пути вырабатывает дискретный сигнал в виде импульсов с постоянной последовательностью интервалов времени ut или интервалов пути Д1. При определенном количестве импульсов (например, за 20 м контрольного участка число импульсов равно я: 480) подается команда на передачу заданных значений вероятности Р и отклонения глубины uh из задающего блока 5 в вычислительный блок 2. Одновременно с этим датчик 4 пути подает сигналы в виде импульсов на блок 3 памяти, каждый импульс - это команда на запись информации от датчика 1 глубины хода рабочих органов.
В блок 3 памяти непрерывно в соответствующую ячейку регистра записывается информация о реальной глубине хода рабочего органа в данный момент времени. Последующие сигналы на опрос, датчика 1 глубины хода рабочих органов и записи информации в блок 3 памяти будет поступать каждый раз после прохода агрегатом пути, равного Д1, со скоростью Vq. По окончании контролируемого участка сигнал об этом поступает от датчика 4 пути на вычислительный блок 2 для обработки информации. Информация, поступающая в блок 3 памяти за это время Т
LR 77, передается в вычислительный
блок для определения текущего среднего значения mxfi и сравнение его с до- допуском на настройку Дп. При этом на выходе задающего блока 5 формируется пороговое напряжение, соответст-, вующее заданным значениям Р5 и &h. Для каждого вновь введенного значения Р3 0,6; 0,7; 0,75; 0,8 и &h 2, 3,
4 см имеется свое значение порогового напряжения. Эти значения и передаются в вычислительный блок 2 для сравнения РЗ с текущим значением вероятности Рт , а датчик-эталон 6 формирует пороговое напряжение равных значению для сравнения с текущим отклонениями напряжения, т.е. п4 ллн соответствующий m,hH+ uh, или m цъ и п в Данном случае датчик- эталон 6 устанавливает заданные границы поля допуска относительно заданного (настроечного) значения hH 6 см, допуск ЛЬ ±2 см, границы допуска 4-8 см.
Вычислительный блок 2 представляет собой однокристальную микро-ЭВМ, имеющую запоминающее устройство (ПЗУ), куда записывается программа, составленная на основе алгоритма по опреде-- тению значений текупего среднего значения, глубины хода m х и Рт. Оперативное запоминающее устройство (ОЗУ) предназначено для записи текущих значений глубины хода сошников Х.
Алгоритм контроля представлен в виде следующих математических формул чфиг. .1 и 4).
J. Вычисление текущих средних значений глубины хода Х(, сошников производится для начального участка наст- оойгси и по запросу - для произвольного участка при работе по выражениям:
L ти
Т
At
kh.
AJL Т„
I ftt J
j - 1 ,2,,..,n,
где mx - текущее среднее значение; X - текущее значение процесса; ut - шаг дискретизации при измерении процесса
(4t -);
Tk - время контроля (TV -).
Rк VK
пн определяется выполнение огнглг- допуска на настройку,
uh - настройка ь допуска
i Ь - настройка вне
допуска,(4)
В последнем случае определяется знак выхода за пределы допуска.
(5)
h mу - выглубленне;
hh гл х - заглубление.
ка настройки и работы агрегата, соответственно по выражениям
pTf..-i-Ј
ь
TJA
-
PT(t-) - 1- J 1 k
Tx/fti j
61
J
где
n - количество иэмеренннх °а интервал Т значений пронесся, выходящих за пределы допуска ± Л h.
Ah)
- ah)
(71 (8)
45
n+ +
Zn
Первое значение РТ(СО) формируетг ся по истечению времени настройки, равного интервалу контроля „. nAt, текущие значения Рт(tj поступают с - 50 интервалом ДС (или Д1) при постоянном интервале контроля Тv (или Ьк). Первое значение Рт(со) Армируется по истечении времени настройки, равного интервалу контроля Tv пДС, j текущие значения Pr(t;) пост/пшэт с интервалом fit (или ul) при гтосточк ном интервале контроля Тк (или L,,). J.3. Текуц-ие значения вероятности сохранения допуска сравниваются с
заданными - 0,6-0,8. При PT(L )Pj - процесс в допуске. При РТ(С )-Р5 - включается автоматическая система регулирования глубины хода рабочего органа, а на информационный блок 7 поступает через блок 8 дешифрации сигнал, включающий -звуковую и световую сигнализации, характеризующие знак выхода глубины па поле, допуска Глубоко или Мелко. выглубление;
ZnH
- заглубление.
(9)
В случае нахождения процесса в по-)5 ле допуска вырабатывается сигнал только для информации тракториста загоранием транспаранта Норма на информационном блоке 7. Блок рассогласования 9 определяем отклонение зна- 20 чений (формула с) порогового напряже- 1шя, соответствующего значению Ьн ± Л h, от tnxh, которое в виде гра- чиц напряжения подает в блок 10 сравнения для определения знака отклоне- 25 пня, т.е. напрякеппе со знаком + или -. Полученное напряжение подается на злектрозолотник для включения го в работу для подачи масла к исволнительному механизму 11 (например, д органов связан с первым входом блока
35
гидроцилшшру) . Клок О сравнения сравнивает сигнал от датчика тталона 6, соответ с гг,у гп;й пороговому напряжению Un( n н i Д ;.) с сигналом, поступающим or блока 9 рассогласования.
Использование предлагаемого устройства регулирования позволяет уменьшить время контроля Тк для получения сигнала о глубине хода рабочих органов, устраняется дискретностью .„ контроля, а соответственно, погрешность в оценке качества, а следовательно повЕ дается точность проводимого контроля. В результате улучшается равномерность глубины обработки, что .,- влияет положительно на урожайность и уборку полученного урожая механизированными средствам . Введением системы управления позволяет освободить тракториста от наПлюденпя за глубиной хода рабочих органов ч сократить простои на подрегулировку процесса.
50
памяти, второй вход которого объединен с входом задающего блока и подключен к первому выходу датчика пути, а второй выход последнего соединен с первым входом вычислительного блока, второй вход которого связан с выходом блока памяти, а третий и четвертый - с первым и вторым выходами задающего блока, причем третий выход последнего подключен к входу эталонного датчика, первый и второй выходы которого соединены соответственно с входом датчика глубины хода рабочих органов и первым входом блока сравнения, при этом первый выход вычислительного блока связан через блок дешифрации с блоком сигнализации, а вто рой выход подключен через блок рас-- согласования к второму входу блока сравнения, выход которого связан с исполнительными механизмами рабочих органов.
5 0 5
Устройство регулирования позволяет в процессе своего функционирования сглаживать реальный процесс, не учитывать случайные выбросы, например нлезд на камень, перекатывание копирующего колеса через яму , что существенно отличает его от устройств прямого регулирования глубины хода рабочих органов сельскохозяйственных машин и является одним из главных до- достоинств .
Формула изобретения
Устройство для регулирования глубины хода рабочих органов сельскохозяйственных машин и орудий, содержащее датчик глубины хода рабочих органов, блок памяти, блок сравнения и блок сигнализации, отличающееся тем, что, с целью повышения - точности регулирования, оно снабжено эталонным датчиком, задающим блоком, датчиком пути, вычислителысым блоком, блоком дешифрации и блоком рассогласования, а рабочие органы снабжены исполнительными механизмами, при этом выход датчика глубины хода рабочих
5
„ ,-
0
памяти, второй вход которого объединен с входом задающего блока и подключен к первому выходу датчика пути, а второй выход последнего соединен с первым входом вычислительного блока, второй вход которого связан с выходом блока памяти, а третий и четвертый - с первым и вторым выходами задающего блока, причем третий выход последнего подключен к входу эталонного датчика, первый и второй выходы которого соединены соответственно с входом датчика глубины хода рабочих органов и первым входом блока сравнения, при этом первый выход вычислительного блока связан через блок дешифрации с блоком сигнализации, а второй выход подключен через блок рас--. согласования к второму входу блока сравнения, выход которого связан с исполнительными механизмами рабочих органов.
W
n 9 .ЬМ
At
uh
11
4
Ь
ш
t:
t
Фигм
Копирующее колесо
Рабочий орган
srrfTf STf rfr ffr
Фиг. I
(
/
a
Фиг.З
Фиг. 5
