Фиг.1
Изобретение относится к машиностроению, в частности к манипуляторам и промышленным роботам, и может быть использовано в различных отраслях машиностроения при автоматизации технологических процессов.
Цель изобретения - улучшение динамических характеристик за счет уменьшения массы подвижных частей.
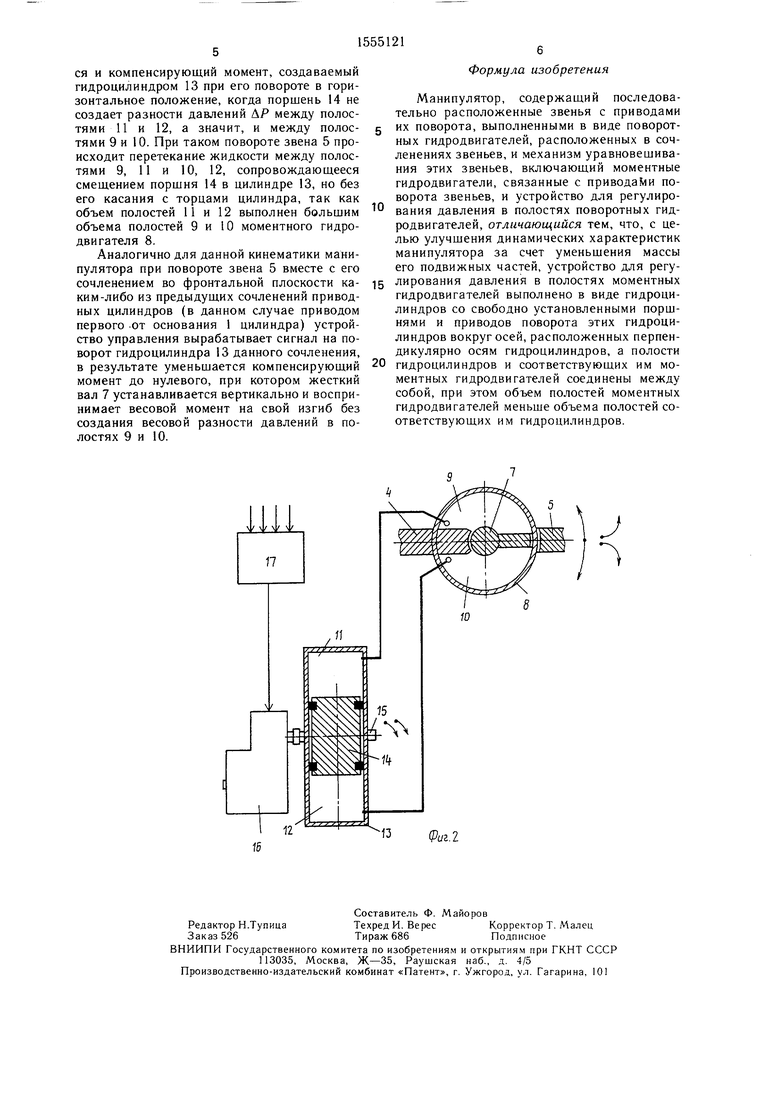
На фиг. 1 представлен манипулятор, общий вид; на фиг. 2 - схема механизма уравновешивания одного из звеньев манипулятора.
Манипулятор закреплен на основании 1 и содержит последовательно расположенные звенья 2-5, сочлененные посредством, например, поворотных гидродвигателей 6, каждый из которых связан валом 7 с мо- ментным гидродвигателем 8 механизма уравновешивания звеньев. Полости гидродвигателей 6 подключены через свои распределители к пневмо- или гидросети манипулятора. Полости 9 и 10 каждого гидродвигателя 8 соединены соответственно с полостями 11 и 12 гидроцилиндра 13, индивидуального для каждого сочленения манипулятора, с образованием замкнутой гидросети в каждом сочленении. Гидроцилиндры 13 расположены вне манипулятора. В каждом гидроцилиндре 13 свободно установлен массивный поршень 14, масса которого т подобрана из условия полной компенсации максимального момента Мь подвижной части манипулятора относительно данного сочленения с учетом веса Р объекта манипулирования. Таким образом, для последнего сочленения
Мь Р-1+М5, где Р - вес объекта;
/ -расстояние от центра тяжести объек-
та до оси сочленения; МБ - момент от веса самого звена 5
манипулятора.
Для предпоследнего сочленения соответственно
Mb P-L+M 5,
где L - расстояние от центра тяжести объекта до оси данного сочленения; Mntb - момент от веса подвижной части манипулятора относительно данного сочленения, т. е. звеньев 4 и 5 вместе с последним сочленением,
и т. д. до первого сочленения от основания 1. Каждый Мь своего сочленения должен
компенсироваться своим дополнительным
гидроцилиндром 8:
м6 цр-&-(),
в
где z - число лопаток в моментном гидродвигателе 8;
Ар - компенсационный перепад давления между нагнетающей и сливной плоскостями гидродвигателя 8; b - ширина лопатки;
D - наружный диаметр его лопатки;
d - диаметр его вала.
Единственным неконструктивным параметром является Ар, который обеспечивается гидроцилиндром 13 и определяется по формуле
л т ё Ар -s±
5
5
где т - масса поршня 14;
g - ускорение свободного падения;
S - площадь сечения поршня 14 гидроцилиндра 13.
Объем полостей 11 и 12 выполнен большим объема полостей 9 и 10.
Гидроцилиндр 13 установлен с возможностью вращения на 90° относительно горизонтальной оси 15, перпендикулярной оси гидроцилиндра и проходящей посередине этого цилиндра, посредством редукторного электродвигателя 16. Электродвигатель 16 каж- 0 дого сочленения подключен к общей системе 17 управления манипулятора, в которой сводятся данные о состоянии каждого гидродвигателя 6.
Манипулятор работает следующим образом.
В положении звеньев манипулятора (фиг. 2) с горизонтальным расположением вала 7 продольная ось гидроцилиндра 13 расположена вертикально. Вес поршня 14 через нижнюю полость 12 создает перепад давления жидкости в нижней полости 10 мо- ментного гидродвигателя 8, а из его верхней полости 9 всасывает жидкость в верхнюю полость 11 гидроцилиндра 13. Вследствие этого и за счет подбора массы поршня 14 гидродвигателем 8 создается компенсирующий момент, равный и обратный по .знаку максимальному моменту от веса подвижной части манипулятора относительно данного сочленения.
В систему 17 вводятся данные о пространственном положении всех звеньев манипулятора, т. е. о рабочем состоянии в данный момент времени всех гидродвигателей 6. Так, при повороте какого-либо гидродвигателя 6 система 17 управления анализирует положение всех звеньев и вырабатывает уп- 5 равляющие сигналы на электродвигатели 16. Алгоритм управления при этом привязан к конкретной кинематике манипулятора и прост в реализации, так как оценке подлежит состояние каждого гидродвигателя 6, в данном случае их четыре.
0
0
0
Например, при повороте (фиг. 2) звена 5 в вертикальной плоскости вверх или вниз на 90° относительно звена 4 при горизонтальном расположении вала 7 система 17 управления вырабатывает сигнал на синхронный поворот гидроцилиндра 13 электродвигателем 16 на те же 90°. При этом по мере уменьшения момента от веса звена 5 при движении его к вертикальному положению уменьшается и компенсирующий момент, создаваемый гидроцилиндром 13 при его повороте в горизонтальное положение, когда поршень 14 не создает разности давлений ЛР между полостями 11 и 12, а значит, и между полостями 9 и 10. При таком повороте звена 5 происходит перетекание жидкости между полостями 9, 11 и 10, 12, сопровождающееся смещением поршня 14 в цилиндре 13, но без его касания с торцами цилиндра, так как объем полостей 11 и 12 выполнен большим объема полостей 9 и 10 моментного гидродвигателя 8.
Аналогично для данной кинематики манипулятора при повороте звена 5 вместе с его
10
Формула изобретения
Манипулятор, содержащий последовательно расположенные звенья с приводами их поворота, выполненными в виде поворотных гидродвигателей, расположенных в сочленениях звеньев, и механизм уравновешивания этих звеньев, включающий моментные гидродвигатели, связанные с приводами поворота звеньев, и устройство для регулирования давления в полостях поворотных гидродвигателей, отличающийся тем, что, с целью улучшения динамических характеристик манипулятора за счет уменьшения массы его подвижных частей, устройство для регусочленением во фронтальной плоскости ка- 15 лирования давления в полостях моментных ким-либо из предыдущих сочленений привод-гидродвигателей выполнено в виде гидроциных цилиндров (в данном случае приводомлиндров со свободно установленными поршпервого-от основания 1 цилиндра) устройство управления вырабатывает сигнал на поворот гидроцилиндра 13 данного сочленения,
нями и приводов поворота этих гидроцилиндров вокруг осей, расположенных перпендикулярно осям гидроцилиндров, а полости
в результате уменьшается компенсирующий 20 гидроцилиндров и соответствующих им момомент до нулевого, при котором жесткий вал 7 устанавливается вертикально и воспринимает весовой момент на свой изгиб без создания весовой разности давлений в полостях 9 и 10.
Формула изобретения
Манипулятор, содержащий последовательно расположенные звенья с приводами их поворота, выполненными в виде поворотных гидродвигателей, расположенных в сочленениях звеньев, и механизм уравновешивания этих звеньев, включающий моментные гидродвигатели, связанные с приводами поворота звеньев, и устройство для регулирования давления в полостях поворотных гидродвигателей, отличающийся тем, что, с целью улучшения динамических характеристик манипулятора за счет уменьшения массы его подвижных частей, устройство для регунями и приводов поворота этих гидроцилиндров вокруг осей, расположенных перпендикулярно осям гидроцилиндров, а полости
гидроцилиндров и соответствующих им моментных гидродвигателе и соединены между собой, при этом объем полостей моментных гидродвигателей меньше объема полостей соответствующих им гидроцилиндров.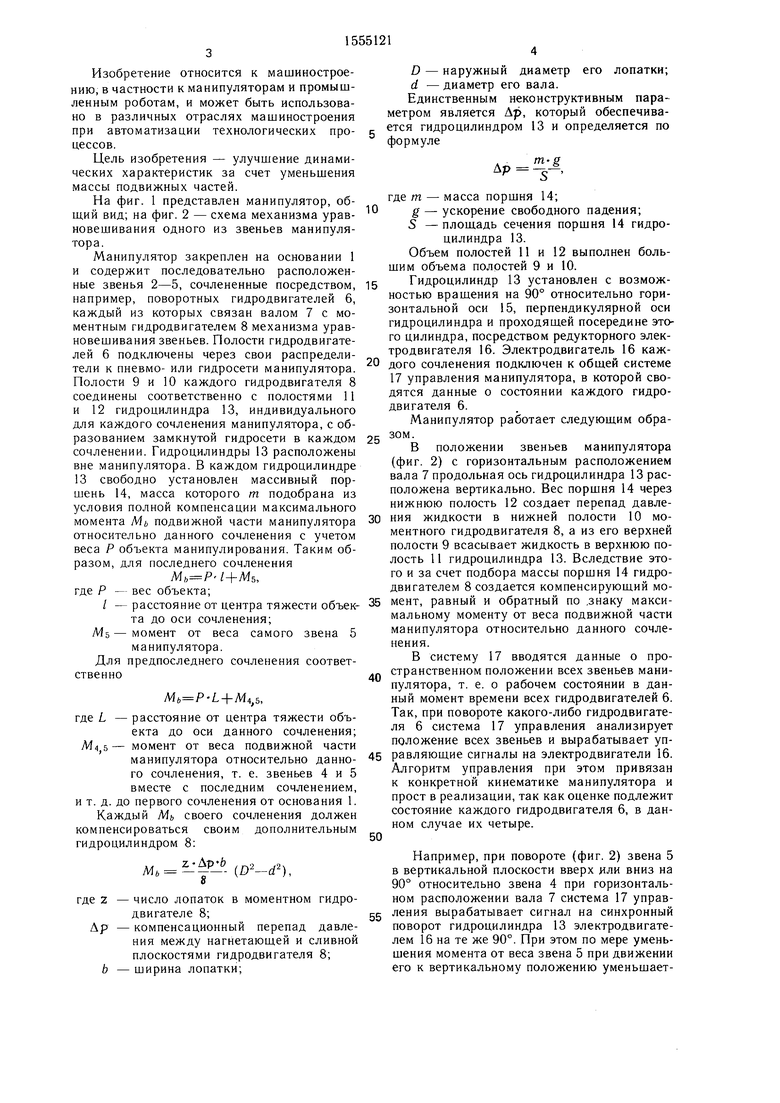
| название | год | авторы | номер документа |
|---|---|---|---|
| Механизм уравновешивания звена манипулятора | 1987 |
|
SU1425076A1 |
| Манипулятор | 1984 |
|
SU1255424A1 |
| Манипулятор | 1979 |
|
SU831607A1 |
| Моментный гидроцилиндр | 1988 |
|
SU1566104A1 |
| АВТОНОМНЫЙ РУЛЕВОЙ ГИДРОПРИВОД | 1985 |
|
SU1839993A1 |
| МАНИПУЛЯТОР | 1971 |
|
SU313653A1 |
| Манипулятор для очистки железнодорожных полувагонов | 1985 |
|
SU1335492A1 |
| Устройство управления рабочим органом землеройной машины | 1987 |
|
SU1463878A1 |
| Передвижная установка для мойки прямоугольных мусорных контейнеров | 1988 |
|
SU1583328A1 |
| Рабочее оборудование одноковшового экскаватора | 1985 |
|
SU1313957A1 |
Изобретение относится к машиностроению, в частности к манипуляторам и промышленным роботам, и может быть использовано в различных отраслях машиностроения при автоматизации технологических процессов. Целью изобретения является улучшение динамических характеристик манипулятора за счет уменьшения веса его подвижных частей. При повороте звеньев манипулятора происходит синхронный поворот гидроцилиндров 13 со свободно установленным поршнем 14, полости 11 и 12 которых связаны с полостями 9 и 10 соответствующих моментных гидродвигателей 8, установленных в сочленениях звеньев манипуляторов и связанных с поворотными двигателями. За счет изменения положения гидроцилиндров 13 в пространстве меняется разность давления между полостями 11 и 12, возникающая в результате действия веса поршня 14, которая обеспечивает уравновешивание звеньев. Поворот гидроцилиндра 13 происходит под действием двигателя 16, связанного с системой 17 управления. 2 ил.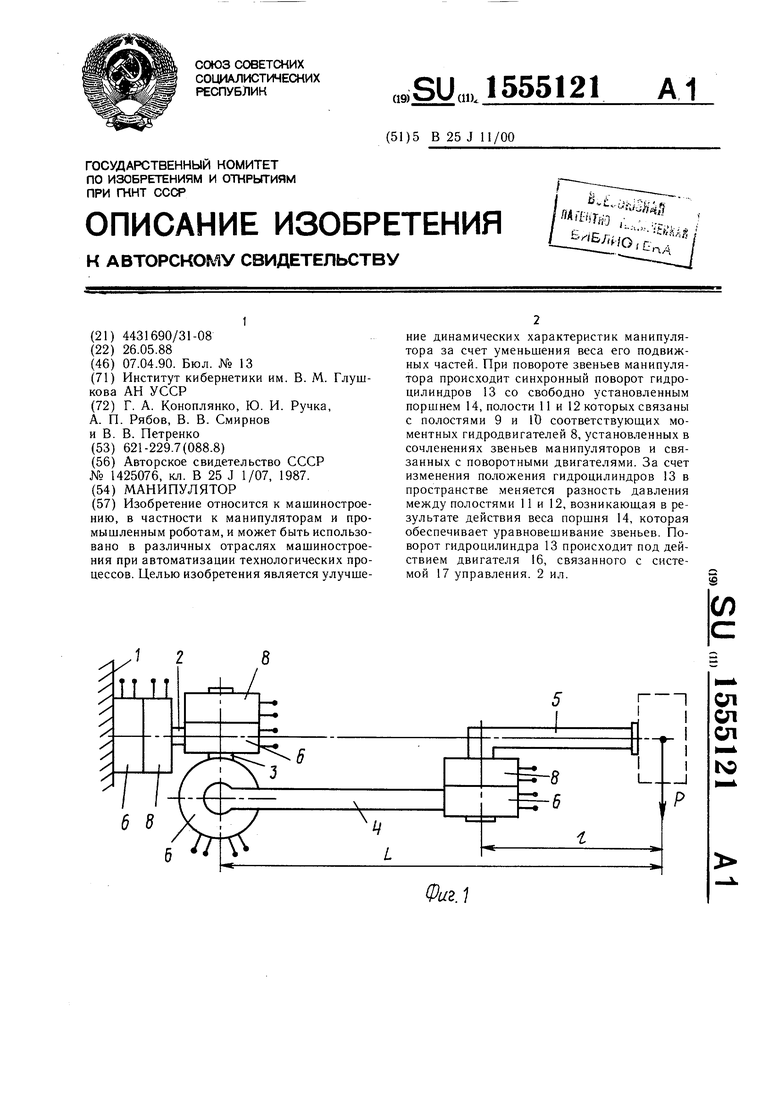
J
}
(Риг
| Механизм уравновешивания звена манипулятора | 1987 |
|
SU1425076A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
