4iik Ю
сд о |
О5
Фиг.1
Изобретение относится к машиностроению, в частности к манипуляторам, и может быть использовано в различных отраслях машиностроения при автоматизации технологических процессов.
Целью изобретения является повышение точности уравновешивания за ,счет обеспечения равномерного воздействия уравновешивающей силы.
На фиг. 1 изображено шарнирное сочленение смежнь1х , звеньев манипулятора; на фит. 2 - разрез А-А на фиг. 1.
Шарнирное соединение звеньев 1 и 2 манипулятора осуществлено через приводной моментный пневмоцилиндр 3, вал 4 которого жестко связан с вподвижное звено 2. Таким образом, суммарный момент Мр давления .столбов жидкости в стаканах 6 и 7 уравновешивает весовой момент М.
Если теперь в процессе работы манипулятора звено 2 поворачивается относительно звена 1 за счет приводного пневмоцилиндра 3 вверх или вниз
0 в вертикальной плоскости, перпендикулярной оси вала 4 (фиг. 2), та вместе со звеном 2 и корпусом гидроцилиндра 5 поворачиваются и стаканы 6 и 7. Вертикальная составляющая столба жидs кости в них при этом уменьшается соответственно повороту звена 2, уменьшая автоматически и уравновешивающий момент Мр вплоть до нулевого при вертикальном положении звена 2, где его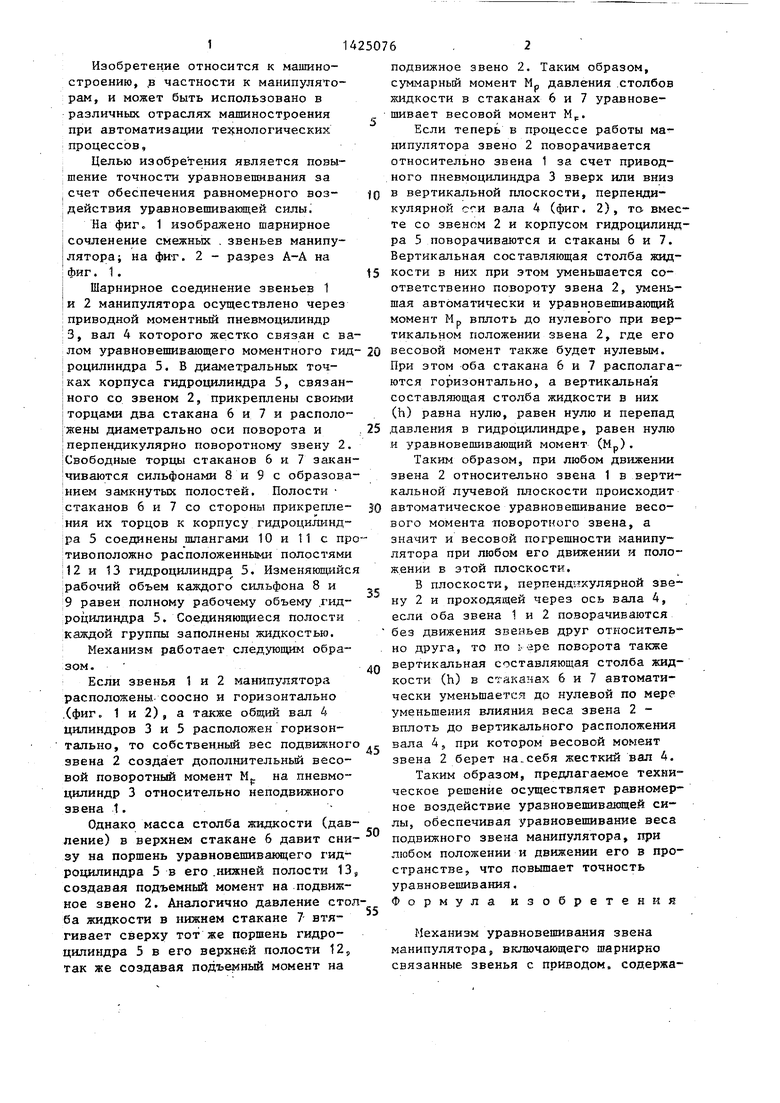
| название | год | авторы | номер документа |
|---|---|---|---|
| Манипулятор | 1988 |
|
SU1555121A1 |
| БАЗОВЫЙ МОДУЛЬ МАНИПУЛЯТОРНОЙ МАШИНЫ | 2012 |
|
RU2522496C2 |
| Манипулятор | 1990 |
|
SU1777993A1 |
| Подвеска рабочего органа лесозаготовительной машины | 1983 |
|
SU1095903A1 |
| ОППОЗИТНЫЙ КРИВОШИПНО-ПОЛЗУННЫЙ МЕХАНИЗМ | 1998 |
|
RU2148744C1 |
| Автоматическая линия для выбивки металлической губки из стаканов | 1975 |
|
SU523140A1 |
| Манипулятор для замены погружного стакана на слябовой машине непрерывного литья заготовок | 2016 |
|
RU2639089C2 |
| Пневмогидравлический следящий привод | 1988 |
|
SU1572990A1 |
| АВТОМАТИЗИРОВАННАЯ ДОИЛЬНАЯ УСТАНОВКА | 2003 |
|
RU2244417C2 |
| Манипулятор | 1980 |
|
SU874329A1 |
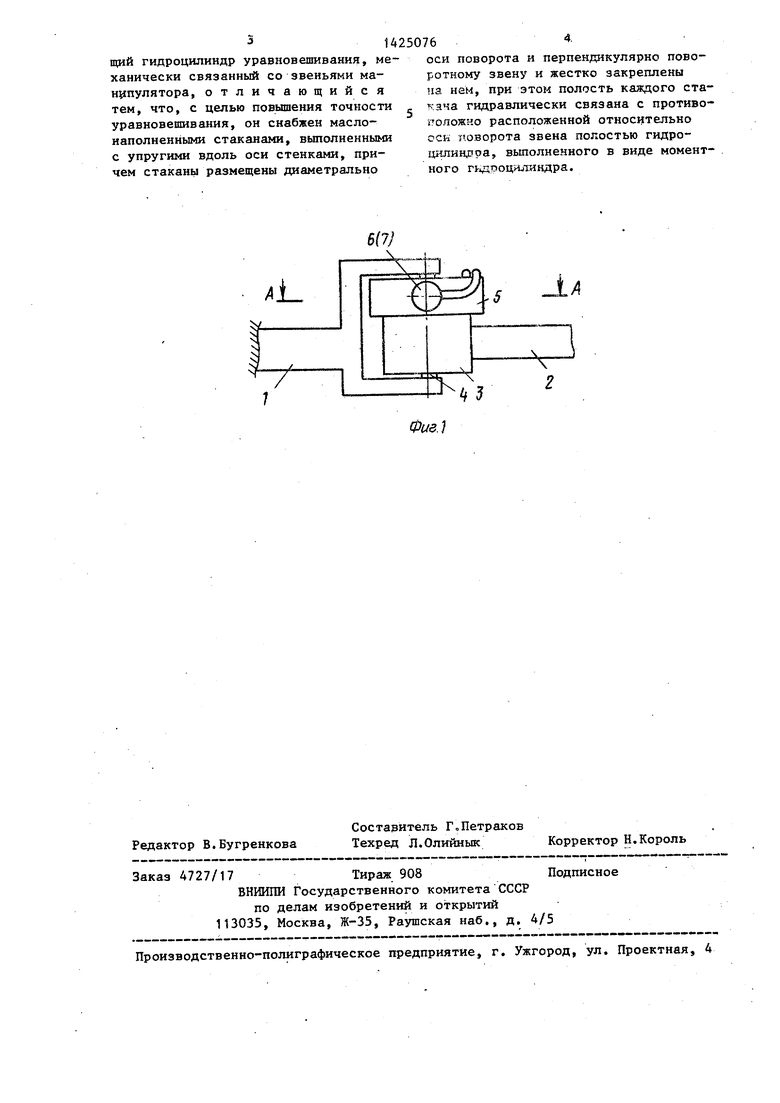
Изобретение относится.к машиностроению, в частности к манипуляторам, и может быть использовано в различных отраслях машиностроения при автоматизации технологических процессов. Целью изобретения является повыА-А шение точности уравновешиваний звена манипулятора. В поворотный узел шар- нирно связанных звеньев 1 и 2 манипулятора введен уравновешивающий мо- ментный гидроцилиндр 5, -параллельно связанный с приводным цилиндром. К диаметральным точкам корпуса гидроцилиндра 5 прикреплены два стакана 6 и 7, расположенные диаметрально оси поворота и перпендикулярно поворотному звену 2. Свободный конец каждого стакана заканчивается сильфоном 8 и 9 с образованием замкнутых полостей. Полости стаканов 6 и 7 со стороны их прикрепления к корпусу гидроцилиндра 5 соединены с противоположно расположенными полостями 12 и 13 этого гидроцилиндра 5. Все полости заполнены жидкостью. 2 ил. S (Л
лом уравновешивающего моментного гид- 20 весовой момент также будет нулевым.
25
35
iроцилиндра 5. В диаметральных точках корпуса гвдроцилиндра 5, связанного со звеном 2, прикреплены своими торцами два стакана 6 и 7 и расположены диаметрально оси поворота и перпендикулярно поворотному звену 2. Свободные торцы стаканов 6 и 7 закан- чиваются сильфонами 8 и 9 с образова- :нием замкнутых полостей. Полости стаканов б и 7 со стороны прикрепления их торцов к корпусу гидроцилиндра 5 соединены шлангами 10 и 11 с противоположно расположенными полостями i12 и 13 гидроцилиндра 5. Изменяющийся рабочий объем каждого сильфона 8 и 9 равен полному рабочему объему гидроцилиндра 5, Соединяющиеся полости каждой группы заполнены жидкостью.
Механизм работает следующим образом.
Если звенья 1 и 2 манипулятора расположены соосно и горизонтально .(фиг. 1 и 2) , а также общий вал 4 цилиндров 3 и 5 расположен горизон- тально, то собственный вес подвижного .с вала звена 2 создает дополнительньй весовой поворотный момент М на пневмоцилиндр 3 относительно неподвижного эвена 1..
Однако масса столба жидкости (давление) в верхнем стакане 6 давит снизу на поршень уравновешивающего гидроцилиндра 5 в его .нижней полости 13, создавая подъемный момент на подвижное звено 2. Аналогично давление столба жидкости в нижнем стакане 7- втягивает сверху тот же поршень гидроцилиндра 5 в его веркнйй полости 12, так же создавая подъемный момент на
40
50
При э ются соста (h) р давле и ура
Та звена кальн автом вого значи лятор жении
ну 2 если без д но др верти кости чески умень впло
звен
ческо ное лы, подви любом стра урав Фор
манип связа
25
35
.с вала
40
0
При этом оба стакана 6 и 7 располагаются горизонтально, а вертикальная составляющая столба жидкости в них (h) равна нулю, равен нулю и перепад давления в гидроцилиндре, равен нулю и уравновешивающий момент (Мр).
Таким образом, при любом движении звена 2 относительно звена 1 в вертикальной лучевой плоскости происходит автоматическое уравновешивание весового момента -поворотного звена, а значит и весовой погрешности манипулятора при любом его движении и положении в этой плоскости.
В плоскости, перпендикулярной звену 2 и проходящей через ось вала 4, если оба звена 1 и 2 поворачиваются без движения звеньев друг относительно друга, то по ьере поворота также вертикальная составляющая столба жидкости (h) в стаказ-iax 6 и 7 автоматически уменьшается до нулевой по мере уменьшения влияния веса звена 2 - вплоть до вертикального расположения
4 5 при котором весовой момент звена 2 берет на.себя жесткий вал 4.
Таким образом, предлагаемое техническое решение осуществляет равномерное воздействие уравновешивающей силы, обеспечивая уравновешивание веса подвижного звена манипулятора, при любом положении и движении его в пространстве, что повышает точность уравновешивания. Формула и
зобретения
Механизм уравновешивания звена манипулятора, включающего шарнирко связанные звенья с приводом, содержащий гидроцилиндр уравновешивания, механически связанный со звеньями ма- н спулятора, отличающийся тем, что, с цепью повышения точности уравновешивания, он снабжен масло- наполненными стаканами, выполненными с упругими вдоль оси стенками, причем стаканы размещены диаметрально
AL.
оси поворота и перпендикулярно поворотному звену и жестко закреплены на нем, при этом полость каждого стакана гидравлически связана с противоположно расположенной относительно оси поворота звена полостью гидро- цилиндоа, выполненного в виде момент- ного rtiBpou aiTHHApa.
| Манипулятор | 1983 |
|
SU1178584A1 |
