Изобретение относится к машиностроению, а именно к опорам вращения с возможностью регулирования угла наклона оси вращения во взаимно перпендикулярных плоскостях.
Цель изобретения - обеспечение регулирования наклона оси поворотного элемента к основанию одновременно в двух взаимно перпендикулярных плос- - костях.
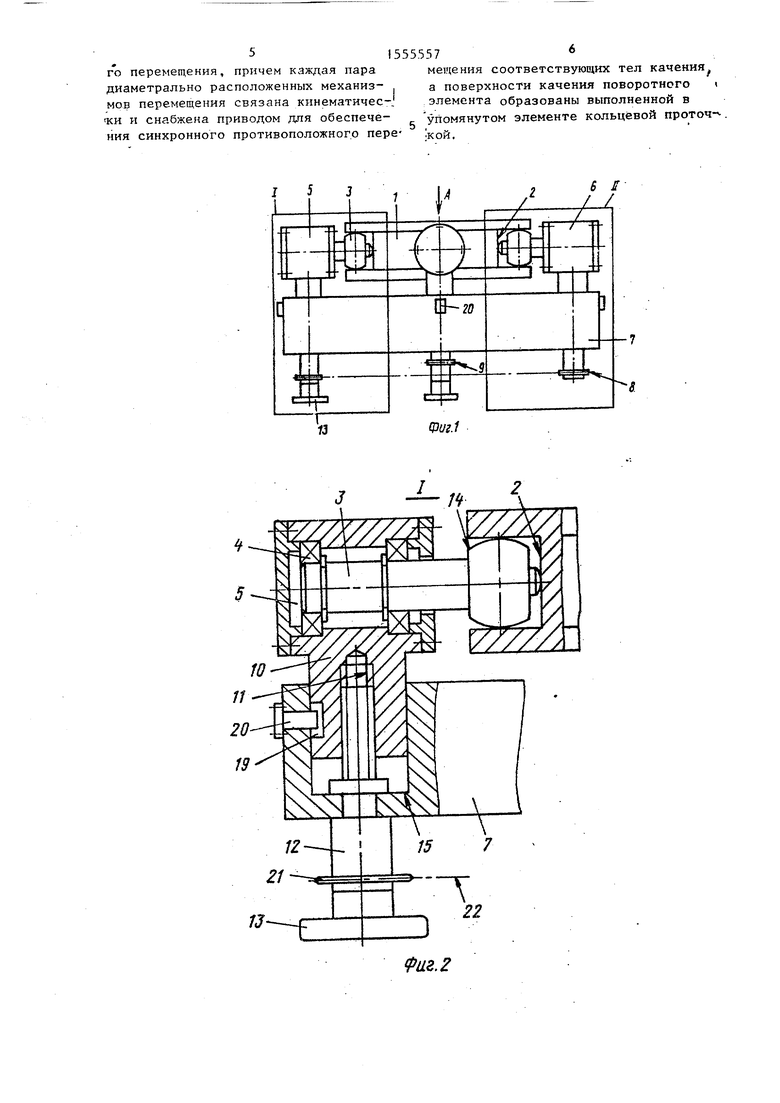
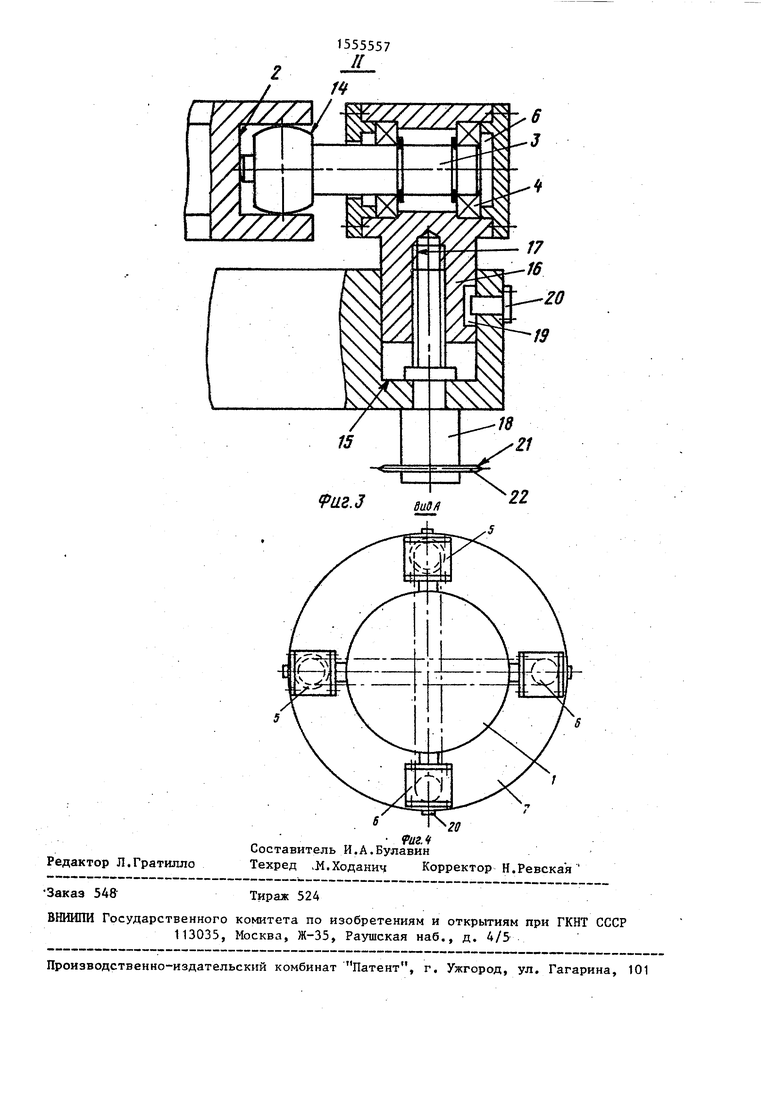
На фиг. 1 показана опора качения, общий вид| на фиг. 2 - узел I на фиг. 2 (тело качения и механизм перемещения с левой резьбой и приводом); на фиг 3 - узел II на фиг, 1 (тело качения и механизма перемещения с правой резьбой и приводом)} на фиг. 4 - - вид А на фиг. 1.
Опора качения для вращательного движения содержит поворотный элемент 1, выполненный с прямоугольной кольцевой проточкой 2, тела 3 качения, расположенные под прямым углом друг к другу в плане и установленные с возможностью вращения в подшипниках 4 на приводных механизмах 5 и 6 перемещения, закрепленных на неподвижном основании 7, а также кинематические связи 8 и 9, обеспечивающие синхронное противоположеное перемещение оп- позитно расположенных тел 3 качения.
Приводной механизм 5 перемещения содержит выдвижную пиноль 10, которая своим центральным внутренним резьбовым отверстием 11с правой резьбой взаимодействует с резьбовым концом соответствующего приводного винта 12, закрепленного с возможностью вращения в неподвижном основании 7, на втором конце которого жестко закреплен маховик 13, а в корпусе выдвижной пиноли 10 закреплены подшипники 4, в которых установлено с возможностью вращения вокруг своей оси тело 3 качения, взаимодействующее сфе- рической наружной поверхностью 14 с прямоугольной кольцевой проточкой 2 поворотного элемента 1, при этом наО)
Сл
СЛ
ел ел
Сл
vj
ружная поверхность выдвижной пино- ли 10 взаимодействует с направляющей 15 неподвижного основания 7.
Приводной механизм 6 перемещения содержит выдвижную пиноль 16, которая своим центральным внутренним резьбовым отверстием 17с левой резьбой взаимодействует с соответствующим приводным винтом 18, закрепленным с возможностью вращения в неподвижном основании 7.
На каждой из выдвижных пинолей 10 и 16 имеется паз 19, ориентированный параллельно оси пиноли по ее образующей. Длина паза 19 выбрана так, чтобы обеспечивалось независимое регулирование наклона оси вращения поворотного элемента 1 в двух взаимно перпендикулярных плоскостях относительно основания 7. Паз 19 контактирует своими внутренними торцами с рабочей частью фиксатора 20, жестко закрепленного на неподвижном основании 7. Каждая кинематическая связь 8 и 9 состоит из цепи 21 и звездочек 22, жестко закрепленных на приводных винтах 12 и 18.
Опора качения работает следующим образом.
При вращении маховика 13 приводного механизма 5 перемещения кинематическая связь 8 передает вращательное движение приводному механизму 6 перемещения. Вращательное движение приводных винтов 12 и 18, полученное от маховика 13 преобразуется в син,- хронное противоположное поступательное движение выдвижных пинолей 10 и 16. При этом пазы 19 вместе с гшноля ми 10 и 16 перемещаются относительно жестко закрепленных фиксаторов 20 вдоль направляющих 15 неподвижного основания 7. Одновременно с этим происходит изменение угла наклона оси вращения поворотного элемента 1 в плоскости, проходящей через оси оппозитно расположенных тел 3 каче- нкч кинематической связи 8 перпендикулярно горизонтальной плоскости, относительно взаимно перпендикулярной плоскости,проходящей через оси оппозитно расположенных тел 3 качения кинематической связи 9. Прямоугольная кольцевая проточка 2 поворотного элемента 1 поворачивается вокруг оси f проходящей через оси оопозит- но расположенных тел 3 качения кинематической связи 9 и скольй
-
10
15
20
25
30
35
40
45
. 50
55
ит по образующим сферических наружных поверхностей 14 оппозитно расположенных тел 3 качения кинематической связи 8 при их синхронном противоположном поступательном движении вместе в выдвижными пиноля- ми 10 и 16.
При одновременном движении маховика 13, входящего в кинематическую связь 9, происходит изменение угла наклона оси вращения поворотного элемента 1 в плоскости, проходящей через оси оппозитно расположенных тел 3 качения кинематической связи 9, относительно взаимно перпендикулярной плоскости, проходящей через оси оппозитно расположенных тел 3 качения кинематической связи 8. Прямоугольная кольцевая проточка 2 поворотного элемента 1 поворачивается вокруг оси, проходящей через оси оппозитно расположенных тел 3 качения кинематической связи 8 и скользит по образующим сферических наружных поверхностей 14 оппозитно расположенных тел 3 качения кинематической связи 9 при их синхронном противоположном поступательном движении вместе с выдвижными пинолями 10 и 16.
Предложенная опора качения обеспечивает независимое и одновременное регулирование наклона оси вращения поворотного элемента в двух взаимно перпендикулярных плоскостях, что расширяет возможности устройства и приводит к снижению трудоемкости регулирования, а также не требует применения вспомогательного инструмента для проведения регулировок.
Формула изобретения
Опора качения для вращательного движения, содержащая поворотный элемент с поверхностями качения и установ-- ленные с возможностью контакта с ними тела качения, выполненные со сферической наружной рабочей поверхностью и установленные на опорных элементах, закрепленных на неподвижном основании, отличающаяся тем, что, с целью обеспечения регулирования наклона оси вращения поворотного элемента к основанию одновременно в двух взаимно перпендикулярных плоскостях, тела качения расположены в одной плоскости под прямым углом друг к другу и оснащены механизмами осево515555576
го перемещения, причем каждая пара мещения соответствующих тел качения диаметрально расположенных механиз- а поверхности качения поворотного . мов перемещения связана кинематичес-1 элемента образованы выполненной в ки и снабжена приводом для обеспече- упомянутом элементе кольцевой проточ- ния синхронного противоположного пере- кой.

| название | год | авторы | номер документа |
|---|---|---|---|
| Опора качения вращательного движения | 1990 |
|
SU1774089A1 |
| Устройство для ориентации объекта | 1989 |
|
SU1702353A1 |
| УНИВЕРСАЛЬНЫЙ КРУГЛОШЛИФОВАЛЬНЫЙ СТАНОК | 1992 |
|
RU2050248C1 |
| УСТРОЙСТВО ДЛЯ ОРИЕНТАЦИИ ОБЪЕКТА | 1991 |
|
RU2018914C1 |
| МАШИНА ДЛЯ ИЗГОТОВЛЕНИЯ ВИТЫХ ИЗДЕЛИЙ | 2003 |
|
RU2235818C1 |
| ПОРШНЕВАЯ МАШИНА | 2001 |
|
RU2181844C1 |
| Способ изготовления колец шарикоподшипников и устройство для его осуществления | 1987 |
|
SU1733171A1 |
| РОТОРНО-ПЛАСТИНЧАТАЯ МАШИНА С ОБЪЕМНЫМ РЕГУЛИРОВАНИЕМ (варианты) | 2017 |
|
RU2643886C1 |
| СФЕРИЧЕСКИЙ КРИВОШИПНО-ПОЛЗУННЫЙ МЕХАНИЗМ (ВАРИАНТЫ) | 2002 |
|
RU2244163C2 |
| Устройство для ленточного шлифования лопаток гтд | 1974 |
|
SU524676A1 |
Изобретение относится к машиностроению. Цель изобретения - обеспечение регулирования наклона оси поворотного элемента к основанию одновременно в двух взаимно перпендикулярных плоскостях. Тела качения 3 расположены под прямым углом одно к другому в плане и установлены на приводных механизмах перемещения 6 с кинематической связью 8, обеспечивающей синхронное вертикально-противоположное перемещение тел качения 3. Такое конструктивное выполнение опоры обеспечивает независимое и одновременное регулирование наклона оси вращения поворотного элемента. 4 ил.
I 5 j
13
t
/
6 I
Фиг.1
22
Фаг. 2
| Опора качения для вращательного движения | 1979 |
|
SU973966A1 |
| Устройство для электрической сигнализации | 1918 |
|
SU16A1 |
