(Л С
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для автоматического напольного транспортирования груза | 1984 |
|
SU1263556A1 |
| Система автоматического регулирования скольжения ведущих колес одной оси автомобиля в тяговом режиме | 1983 |
|
SU1232514A1 |
| ПУТЕВОЙ ДАТЧИК | 1992 |
|
RU2066647C1 |
| ПУТЕВОЙ ДАТЧИК | 1995 |
|
RU2084363C1 |
| СПОСОБ ПРЕДОТВРАЩЕНИЯ НЕПРАВОМЕРНЫХ ДЕЙСТВИЙ ВОДИТЕЛЯ ТРАНСПОРТНОГО СРЕДСТВА И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2015 |
|
RU2613918C2 |
| Устройство для управления движением транспортного средства | 1984 |
|
SU1262458A1 |
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ МНОГОЗВЕННОГО ТРАНСПОРТНОГО СРЕДСТВА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 1996 |
|
RU2096230C1 |
| Система управления транспортным средством | 1987 |
|
SU1550480A1 |
| СИСТЕМА СТАБИЛИЗАЦИИ КУРСА ДЛЯ ТРАНСПОРТНОГО СРЕДСТВА | 1992 |
|
RU2060532C1 |
| СПОСОБ ФУНКЦИОНИРОВАНИЯ ИНФОРМАЦИОННО-ВЫЧИСЛИТЕЛЬНОЙ СИСТЕМЫ ТРАНСПОРТНОГО СРЕДСТВА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2011 |
|
RU2462696C1 |
Изобретение относится к транспортным роботам, используемым в автоматизированных транспортных системах. Цель изобретения - повышение надежности. Автоматическое напольное транспортное средство содержит ведущие 2, 3 и ведомые 1, 4 колеса с приводами 7, 8 поворота колес одного и другого борта, блоки 11, 12 считывания сигналов путевых меток, нанесенных на участках 13, 14 трассы. 1 з.п. ф-лы, 3 ил.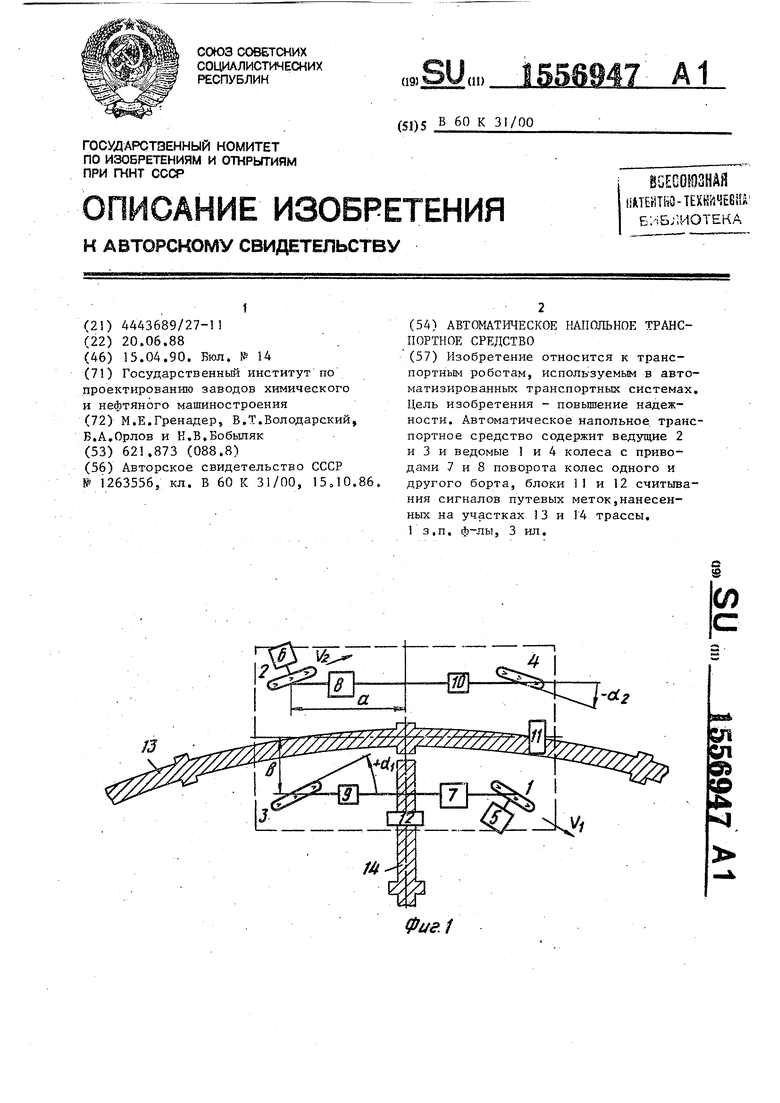
Фие.1
Изобретение относится к транспортным роботам и может быть использовано в качестве транспортного средства во внутрицеховых автоматизирован- ных транспортных системах, в том числе в цехах промышленных предприятий, имеющих стесненные условия для маневрирования.
Цель изобретения - повышение на- дежности.
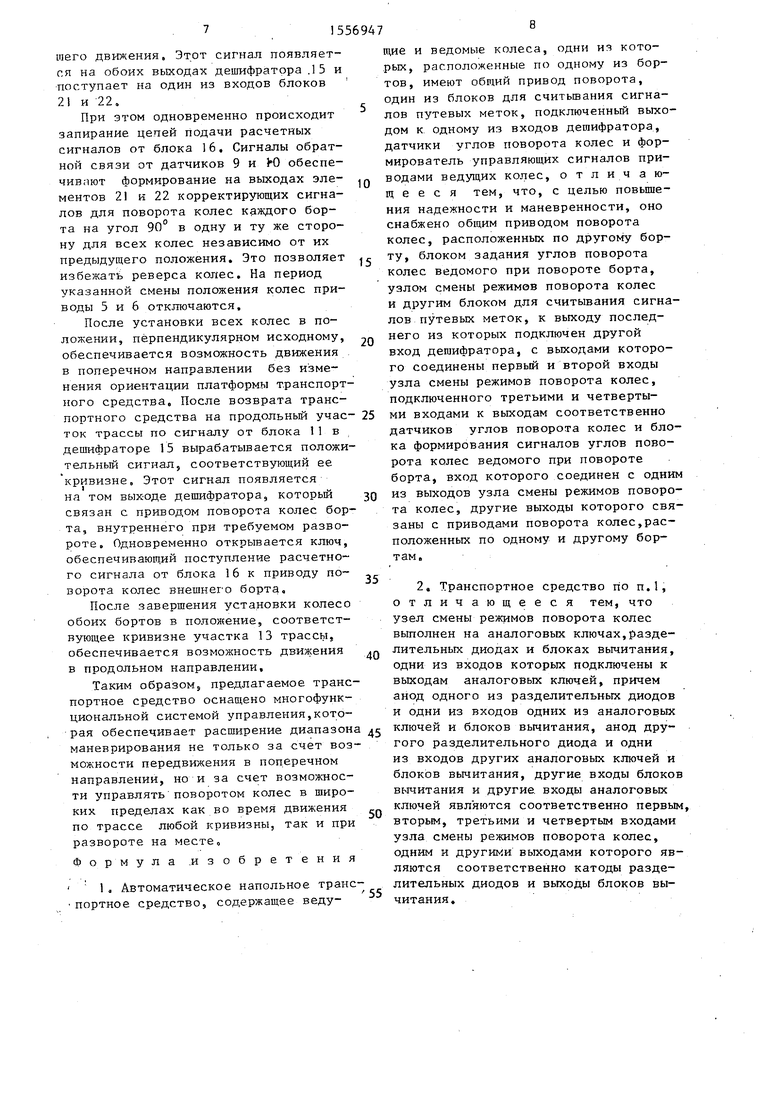
На фиг.1 представлена структурная схема предлагаемого транспортного средства; на фиг, 2 - структурная схема системы управления транспорт- ным средством; на фиг. 3 - структурная схема блока задания углов поворота колес наружного борта.
Автоматическое напольное транспортное средство (фиг.1) содержит платформу с управляемыми ведущими колесами 1 и 2 и управляемыми ведомыми колесами 3 и 4. Ведущие колеса
Iи 2 снабжены соответственно приводами 5 и 6, Колеса 1 и 3 кинематичес ки связаны с общим для них приводом
7 поворота колеса одного борта.Колеса 2 и 4 кинематически связаны с общим для них приводом 8 поворота коле другого борта, С приводами 7 и 8 кинематически связаны соответственно датчики 9 и 10 углов поворота колес. Под платформой поперек соответственно продольной и поперечной осей транспортного средства размещены блоки 11 и 12 для считывания сигналов путевых меток, нанесенных на продольных и поперечных участках 13 и 14 трассы его движения.
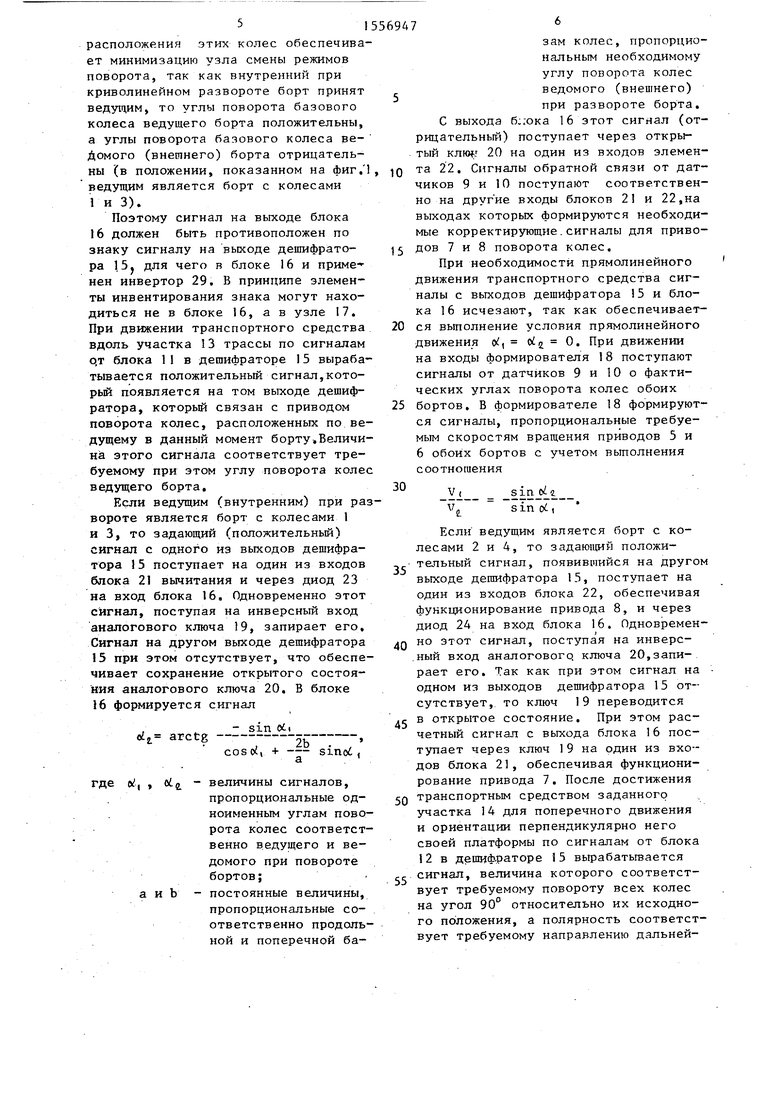
Система управления (фиг.2) содер- жит дешифратор 15 сигналов путевых меток, блок 16 формирования сигналов углов поворота колес внешнего борта, узел 17 смены режимов поворота колес формирователь 18 управляющих сигнало для приводов 5 и 6„ Входы дешифратора I5 соединены с выходами блоков
IIи 12 для считывания путевых меток а выходы - с первым и вторым входами узла 17 смены режимов поворота колес третьи и четвертьй входы которого подключены соответственно к выходам датчиков 9 и 10 и блока 16 задания углов поворота колес внешнего борта, вход которого соединен с одним из выходов узла 17, другие выходы которого связаны с приводами 7 и 8 поворота колес, причем входы формирователя 18 подключены к выходам датчи
5
0
5
0
Q $
.
5
5
ков 9 и 10. Узел 17 смены режимов поворота колес выполнен на аналоговых ключах 19 и 20, блоках 21 и 22 вычитания и разделительных диодах 23 и 24. Выходы аналоговых ключей 19 и 20 соединены с одними из входов блоков
21и 22 вычитания. Анод разделительного диода 23, инверсный вход аналогового ключа 19 и один из входов блока 2 вычитания, анод разделительного диода 24, инверсный вход аналогового ключа 20 и один из входов блока
22вычитания, другие входы блоков 21 и 22 вычитания и аналоговые входы ключей 19 и 20 являются соответственно первым, вторым, третьими и четвертым входами узла 17, одним и другими выходами которого являются соответственно катоды разделительных диодов 23 и 24 и выходы блоков 21 и 22 вычитания.
Блок 16 (фиг.З) содержит синусные 25 и косинусные 26 преобразователи, умножитель 27, сумматор 28, инвертор 29 знака, делитель 30 и преобразователь 31 обратной тригонометрической функции arctgx,
Объединенный вход преобразователей 25 и 26 является входом блока 16. Выход преобразователя 25 связан с одним из входов умножителя 27 и входом инвертора 29, выход которого соединен с одним из входов делителя 30. Выход преобразователя 26 связан с одним из входов сумматора 28, Другой вход умножителя 27 связан с источником постоянного сигнала.Выход умножителя 27 связан с другим входом сумматора 28, выход которого соединен с другим входом делителя 30.Выход делителя 30 соединен с входом преобразователя 31, выход которого является выходом блока 16.
Автоматизированное напольное транспортное средство работает следующим образом.
За базу для расчета углов поворота колес принята диагональ, на которой, например, расположены колеса 3 и 4, причем отклонение колес от исходного продольного положения против часовой стрелки принято за положительное, а по часовой стрелке - за отрицательное.
Такое расположение базовых колес дает возможность получить на выходах дешифратора 15 сигналы одинаковой полярности, что в отличие от иного
5
расположения этих колес обеспечивает минимизацию узла смены режимов поворота, так как внутренний при криволинейном развороте борт принят ведущим, то углы поворота базового колеса ведущего борта положительны, а углы поворота базового колеса ве- Домого (внешнего) борта отрицательны (в положении, показанном на фиг.Ч ведущим является борт с колесами 1 и 3).
Поэтому сигнал на выходе блока 16 должен быть противоположен по знаку сигналу на выходе дешифратора 15j для чего в блоке 16 и приме
нен инвертор 29. В принципе элементы инвентирования знака могут находиться не в блоке 16, а в узле 17. При движении транспортного средства вдоль участка 13 трассы по сигналам о,т блока 1 1 в дешифраторе 15 вырабатывается положительный сигнал,который появляется на том выходе дешифратора, который связан с приводом поворота колес, расположенных по ведущему в данный момент борту.Величина этого сигнала соответствует требуемому при этом углу поворота коле ведущего борта.
Если ведущим (внутренним) при равороте является борт с колесами 1 и 3, то задающий (положительный) сигнал с одного из выходов дешифратора 15 поступает на один из входов блока 21 вычитания и через диод 23 на вход блока 16, Одновременно этот сигнал, поступая на инверсный вход аналогового ключа 19, запирает его, Сигнал на другом выходе дешифратора
15при этом отсутствует, что обеспечивает сохранение открытого состояния аналогового ключа 20. В блоке
16формируется сигнал
. - sin ot( oit arctg2ь
cos of, +sinoi i
a
где uit , otu - величины сигналов,
пропорциональные одноименным углам поворота колес соответственно ведущего и ведомого при повороте бортов;
а и b - постоянные величины, пропорциональные соответственно продольной и поперечной ба
зам колес, пропорциональным необходимому углу поворота колес ведомого (внешнего) при развороте борта. С выхода б,;ока 16 этот сигнал (отрицательный) поступает через открытый клин: 20 на один из входов элемента 22. Сигналы обратной связи от датчиков 9 и 10 поступают соответственно на другие входы блоков 21 и 22,на выходах которых формируются необходимые корректирующие сигналы для приводов 7 и 8 поворота колес.
При необходимости прямолинейного движения транспортного средства сигналы с выходов дешифратора 15 и блока 16 исчезают, так как обеспечивает- 0 ся выполнение условия прямолинейного движения Х, Ыг 0. При движении на входы формирователя 18 поступают сигналы от датчиков 9 и 10 о фактических углах поворота колес обоих 5 бортов, В формирователе 18 формируются сигналы, пропорциональные требуемым скоростям вращения приводов 5 и 6 обоих бортов с учетом выполнения соотношения
5
Yi. v,
sin c (
5
0
0
Если ведущим является борт с колесами 2 и 4, то задающий положительный сигнал, появившийся на другом выходе дешифратора 15, поступает на один из входов блока 22, обеспечивая функционирование привода 8, и через диод 24 на вход блока 16. Одновременно этот сигнал, поступая на инверсный вход аналогового, ключа 20,запирает его. Так как при этом сигнал на одном из выходов дешифратора 15 отсутствует, то ключ 19 переводится
с в открытое состояние. При этом расчетный сигнал с выхода блока 16 поступает через ключ 19 на один из входов блока 21, обеспечивая функционирование привода 7. После достижения транспортным средством заданного участка 14 для поперечного движения и ориентации перпендикулярно него своей платформы по сигналам от блока 12 в дешифраторе 15 вырабатывается
Ј- сигнал, величина которого соответствует требуемому повороту всех колес на угол 90° относительно их исходного положения, а полярность соответствует требуемому направлению дальней
шего движения. Этот сигнал появляется на обоих выходах дешифратора .15 и поступает на один из входов блоков 21 и 22,
При этом одновременно происходит запирание цепей подачи расчетных сигналов от блока 16. Сигналы обратной связи от датчиков 9 и М) обеспечив пют формирование на выходах элементов 21 и 22 корректирующих сигналов для поворота колес каждого борта на угол 90 в одну и ту же сторону для всех колес независимо от их предыдущего положения. Это позволяет избежать реверса колес. На период указанной смены положения колес приводы 5 и 6 отключаются.
После установки всех колес в положении, перпендикулярном исходному, обеспечивается возможность движения в поперечном направлении без изменения ориентации платформы транспортного средства. После возврата транспортного средства на продольный учас ток трассы по сигналу от блока 11 в дешифраторе 15 вырабатывается положительный сигнал, соответствующий ее кривизне. Этот сигнал появляется на том выходе дешифратора, который связан с приводом поворота колес борта, внутреннего при требуемом развороте. Одновременно открывается ключ, обеспечивающий поступление расчетного сигнала от блока 16 к приводу поворота колес внешнего борта.
После завершения установки колесо обоих бортов в положение, соответствующее кривизне участка 13 трассы, обеспечивается возможность движения в продольном направлении.
Таким образомs предлагаемое транспортное средство оснащено многофункциональной системой управления,кото
рая обеспечивает расширение диапазона ключей и блоков вычитания, анод друманеврирования не только за счет возможности передвижения в поперечном направлении, но и за счет возможности управлять поворотом колес в широких пределах как во время движения по трассе любой кривизны, так и при развороте на месте о Формула изобретения
5
0
5
0
5
0
щие и ведомые колеса, одни из которых, расположенные по одному из бортов, имеют общий привод поворота, один из блоков для считывания сигналов путевых меток, подключенный выходом к одному из входов дешифратора, датчики углов поворота колес и формирователь управляющих сигналов приводами ведущих колес, отличающееся тем, что, с целью повышения надежности и маневренности, оно снабжено общим приводом поворота колес, расположенных по другому борту, блоком задания углов поворота колес ведомого при повороте борта, узлом смены режимов поворота колес и другим блоком для считывания сигналов путевых меток, к выходу последнего из которых подключен другой вход дешифратора, с выходами которого соединены первый и второй входы узла смены режимов поворота колес, подключенного третьими и четвертыми входами к выходам соответственно датчиков углов поворота колес и блока формирования сигналов углов поворота колес ведомого при повороте борта, вход которого соединен с одним из выходов узла смены режимов поворота колес, другие выходы которого связаны с приводами поворота колес,расположенных по одному и другому бортам,
гого разделительного диода и одни из входов других аналоговых ключей и блоков вычитания, другие входы блоков вычитания и другие входы аналоговых ключей являются соответственно первым, вторым, третьими и четвертым входами узла смены режимов поворота колес, одним и другими выходами которого являются соответственно катоды разделительных диодов и выходы блоков вычитания.
Фиг. 2
п
Фие.З
| Устройство для автоматического напольного транспортирования груза | 1984 |
|
SU1263556A1 |
| Способ получения молочной кислоты | 1922 |
|
SU60A1 |
