Изобретение относится к робототехнике и может быть использовано для переме 1цения разнообразных матет риальных грузов, инструментов, оснастки, заготовок и деталей между технологическими объектами гибких автоматизированных производств (ГАП) в соответствии с директивно задан- , ньам во времени и пространстве графиком транспортирования грузов в условиях помех, определяемых неровностями рельефа и физическими характеристиками поверхности пола реального производственного помещения. Цель изобретения - повышение производительности транспортирования грузов в условиях производственных помех, На чертеже представлена структурная схема устройства автоматического транспортирования грузов. Устройство содержит выполненную из оптически контрастного материала разветвленную трассу 1 с расположенными вдоль нее путевыми метками, напольное транспортное средство, включающее две кинематические пары связанных между собой рулевых колес 2, 3 и 4 и 5, два ведущих колеса 6 и 7, оптический считыватель 8 сигналов и дешифратор 9 сигна лов путевых меток, датчики 10 и 11 ориентации руле вых , измерители 12-15 скорости вращения рулевых колес, два силовых привода 1 и J 7 тяговых колес 18 и 19, сумматоры 20 и 21 скоростей вращения рулевых колес левого и правого бортов, два измерителя 22 и 23 тока в тяговых приводах, таймер 24, элементы вычисления остатка времени 25 и пути 26, блок 27 деления, задатчики пути 28, времени 29, и веса груза 30, блоки 31 и 32 умножения, элементы 33 и 34 вычитания, аналоговые ключи 35-38, дополнительные сумматоры 39 и 40, умножители 41 и 42 веса, компараторы 43 и 44, генератор 45пилообразного напряжения, привод 46рулевых колес. Устройство работает следующим обр При условии сохраняющихся связей колес 2-7 с поверхностью пола по информации об ориентации направления движения, угловых скоростях рулецых колес и величине угла поворота руля в системе вырабатываются управляющие сигналы величин приводных 1 62 и рулевого моментов,, обеспечивающих асимптотическую устойчивость движения транспортировки грузов за счет формирования дополнительных приводных моментов, компенсирующих изменение скорости движения транспортного средства вдоль указанной трассы. Рассмотрим процесс транспортирования грузов между технологическими объектами ГАП согласно директивно заданных пространственно-временных параметров движения по указанному маршруту. При отсутствии нарушений связей колес с поверхностью пола и при условии постоянства скорости движения транспортного средства (приращение скорости равно нулю) входными переменными являются рассогласование в ориентации движения и текущей угол поворота руля. Такой регулятор компенсирует только лишь рассогласование в пространственном положении транспортного средства относительно линии трассоуказателя за счет управляющего рулевого момента. В случае нарушения связей колес с поверхностью пола возникает третья (поперечная) степень свободы и приводные и рулевые моменты в этом случае обеспечивают движение транспортного средства со скоростью, необходимой для реализации пространственновременных параметров доставки грузов, за счет формирования дополнительных моментов, пропорциональных нагрузке, разности текущей и заданной скоростей, знаку и уровню помех под каждым из бортов. Например, если под одним из бортов транспортного средства (левым) ведущее колесо 7 проскальзывает изза недостаточного сцепления с поверхностью пола, то за счет приводного момента на колесе 6 (по цепи двигатель 18 и привод 16), имеющем лучшее сцепление с полотнйм пути, транспортное средство начинает разворачиваться влево. Это вызывает появление сигнала рассогласования ориентации направление движения, которое компенсиргуется соответствующим поворотом руля с помощью привода 16. В результате согласования углов поворота рулевых колес левого и правого борта трапецеидальными механизмаьш привода внутреннее по направлению поворота ведущее колесо 6 пропорци-.
онально снизит скорость своего вращения по цепи электронного дифферен циала, включающего датчик 10,блок 32.
В свою очередь, это вызовет снижение текущей скорости движения транс портного средства по указанному маршруту и ответную реакцию регулятора, формирующего дополнительный момент ведущего колеса 6 по цепи: сумматор 40, аналоговые ключи 36 и 38, измерители 22 и 23 тока двигателей 18 и 19. За счет форсирующего момента скорость транспортного средства выравнивается на элементах блоках 33 и 34 вычитания до уровня, определявИ сенииц ,7ymt/
мого оставшимся участком марщрута и отведенным временем его прохождения, вплоть до момента восстановления связей ведущих колес 6 и 7. С этого момента регулятор транспортною средства формирует приводные моменты, функционально связанные с весом груза (задатчик 30 груза, блоки 41 и 42) и скорость, определяемой оставшейся длиной пути и временем (задатчцк пути 28 и времени 29, дешифратор 9, таймер 24, два элемента 33 и 34 и блок 27 деления) по цепи широтно-импульсной модуляции, включающей генератор 45 и компараторы 43, 44.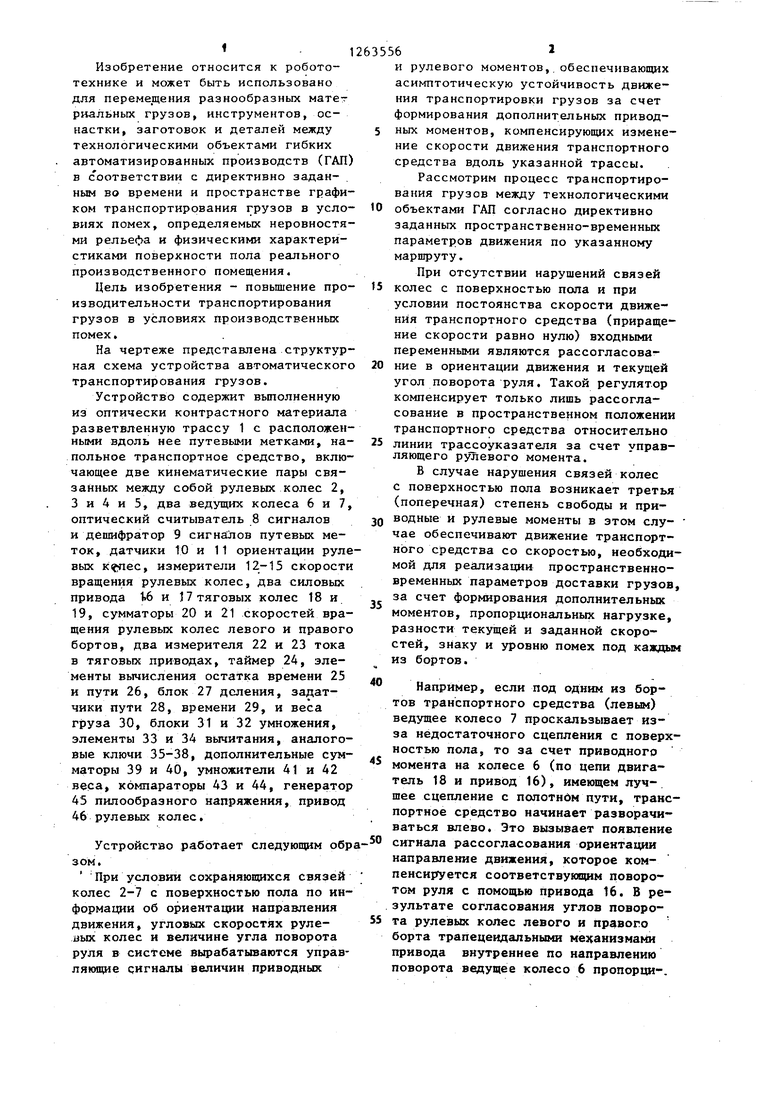
| название | год | авторы | номер документа |
|---|---|---|---|
| Автоматическое напольное транспортное средство | 1988 |
|
SU1556947A1 |
| УПРАВЛЕНИЕ ДИФФЕРЕНЦИАЛОМ ОГРАНИЧЕННОГО ПРОСКАЛЬЗЫВАНИЯ НА ОСНОВЕ УГЛА ПОВОРОТА ТРАНСПОРТНОГО СРЕДСТВА | 2018 |
|
RU2769167C2 |
| ТРАНСПОРТНОЕ СРЕДСТВО И СПОСОБ УПРАВЛЕНИЯ РУЛЕНИЕМ ТРАНСПОРТНОГО СРЕДСТВА | 2011 |
|
RU2533854C1 |
| СПОСОБ УПРАВЛЕНИЯ ДВИЖЕНИЕМ МНОГОЗВЕННОГО ТРАНСПОРТНОГО СРЕДСТВА И УСТРОЙСТВО ДЛЯ ЕГО РЕАЛИЗАЦИИ | 1996 |
|
RU2096230C1 |
| РУЛЕВОЕ УПРАВЛЕНИЕ ТРАНСПОРТНОГО СРЕДСТВА | 1999 |
|
RU2157327C1 |
| СПОСОБ КОНТРОЛЯ ПИЛОТАЖНО-НАВИГАЦИОННОГО КОМПЛЕКСА И УСТРОЙСТВО ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2016 |
|
RU2658538C2 |
| СЕРВОПРИВОД СИСТЕМЫ РУЛЕВОГО УПРАВЛЕНИЯ | 2000 |
|
RU2185989C1 |
| Система управления транспортным средством | 1987 |
|
SU1550480A1 |
| ПОЗИЦИОНИРУЮЩЕЕ УСТРОЙСТВО ДЛЯ СВОБОДНО ВЗЛЕТАЮЩЕГО ПАРУСА ТИПА КАЙТА НА ВОДНОМ ТРАНСПОРТНОМ СРЕДСТВЕ С ВЕТРОВЫМ ПРИВОДОМ | 2005 |
|
RU2359864C2 |
| СПОСОБ ГРУППОВОГО ВОЖДЕНИЯ ДОРОЖНЫХ ДРОНОВ И СИСТЕМА ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2017 |
|
RU2662297C1 |
УСТРОЙСТВО ДЛЯ АВТОМАТИЧЕСКОГО НАПОЛЬНОГО ТРАНСПОРТИРОВАНИЯ ГРУЗА, содержащее выполненную из оптически контрастного материала разветвленную трассу с расположенными вдоль нее путевыми метками, воздействующими на оптические считыватели сигналов путевых меток, установленные на транспортном средстве, имеющем две пары связанных между собой рулевых колес с приводом рулевого управления и расположенные между ними ведупще колеса, одно из которык снабжено приводом с электродвигателем, дешифратор сигналов путевых меток, задатчики пути, времени и веса груза, таймер и блок формирования управляющих сигналов, содержащий генератор пилообразного напряжения. связанный с одним умножителем веса, и компаратор, выход которого связан с приводом ведущего колеса, отличающееся тем, что, с целью повышения производительности транспортирования в условиях помех, оно снабжено дополнительным приводом, двигатель которого связан с другим ведущим колесом, измерителями скоростей вращения рулевых колес, cyi iaторами скоростей вращения колес левого и правого бортов, элементами вычитания, одни входы которых подключены к выходам упомянутых сумматоров, датчиками ориентации рулевых с SS колес, блоками умножения, одни яэ (Л выходов которых связаны с последними, элементами вычитания остатков пути и времени и подключенным к их выходам своими входами блоком деления, выход которого соединен с другими входами блоков умножения, аналоговыми ключами, одни из входов которых соединены с измерителями скою рости вращения рулевых колес,.а друЭд гие - с измерителями тока силовых приводов, при этом блок формирова- . :о :л ;п ния управляющего сигнала снабжен до- полнительными сумматорами, умножителем веса и компаратором, выход поЭ) следнего из которых связан с дополнительным приводом, а входы - с выxoдatни дополнительного умножителя и генератора пилообразного напряжения.
| Ando S | |||
| Очаг для массовой варки пищи, выпечки хлеба и кипячения воды | 1921 |
|
SU4A1 |
| Передвижная комнатная печь | 1922 |
|
SU383A1 |
