() УСТРОЙСТВО УПРАВЛЕНИЯ МНОГОКООРДИНАТНЫМ МЕХАНИЗМОМ
| название | год | авторы | номер документа |
|---|---|---|---|
| Шаговая система программного управления манипулятором | 1978 |
|
SU746433A1 |
| Система адаптивного числового программного управления металлорежущим станком | 1980 |
|
SU954945A1 |
| Устройство для управления автоматизированным прессовым оборудованием | 1983 |
|
SU1131678A1 |
| Цифровой регулятор частоты вращения | 1987 |
|
SU1571545A1 |
| Шаговая система программного управления многокоординатным манипулятором | 1977 |
|
SU644617A1 |
| Следящая система | 1982 |
|
SU1081622A1 |
| Устройство для программного разгона шагового двигателя | 1986 |
|
SU1387165A1 |
| Устройство для программного управления процессом обработки изделий микроэлектроники | 1986 |
|
SU1386962A1 |
| Система числового программного управления с постоянной скоростью резания для токарно-винторезных станков | 1981 |
|
SU978102A1 |
| Цифровая следящая система | 1978 |
|
SU744439A1 |
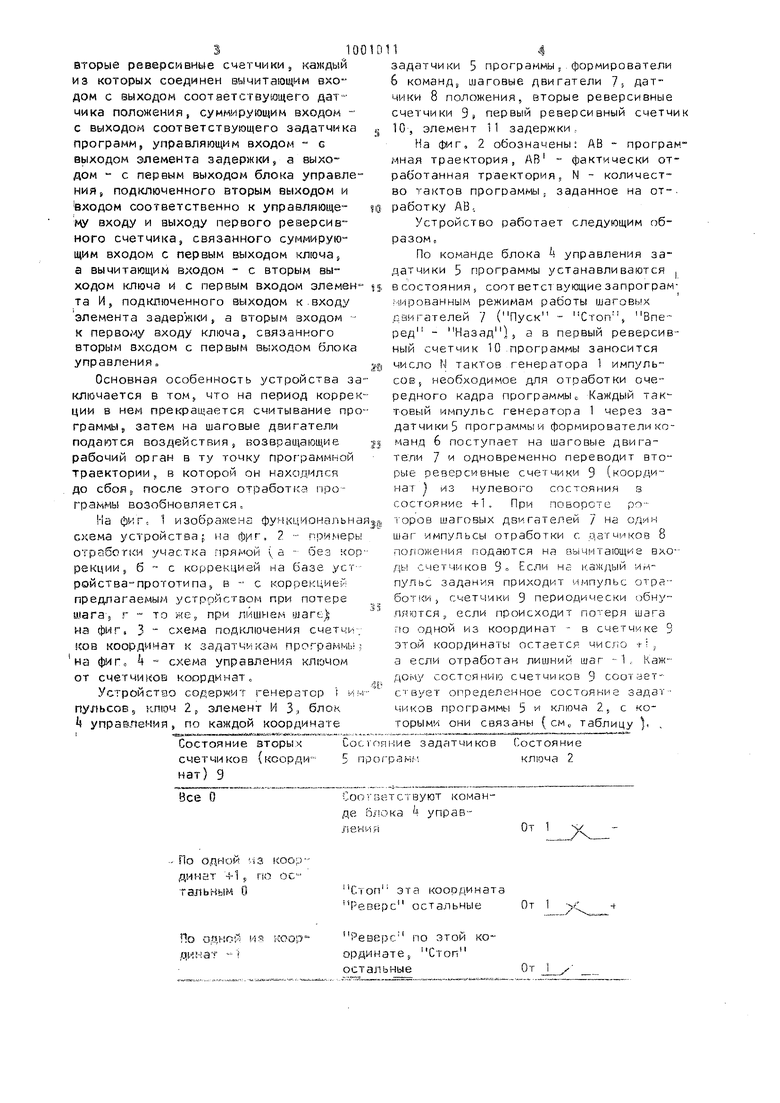
вторые реверсивные счетчики, каждый из которых соединен вычитающим входом с выходом соотаетствущего датчика положения, суммирующим входом - с выходом соответствующего задатчика программ5 управляющим входом с выходом элемента задержки, а выходом с первым выходом блока управления, подключенного вторым выходом и входом соответственно к упразляющеМУ входу и выходу первого реверсивного счетчика, связанного суммирующим входом с первым выходом ключа а вычитающим входом - с вторым выходом ключа и с первым входом злемен та И5 подюлгоченного выходом к.входу элемента задержки, а вторым входом к первому входу ключа, связанного вторым входом с первым выходом блока управления
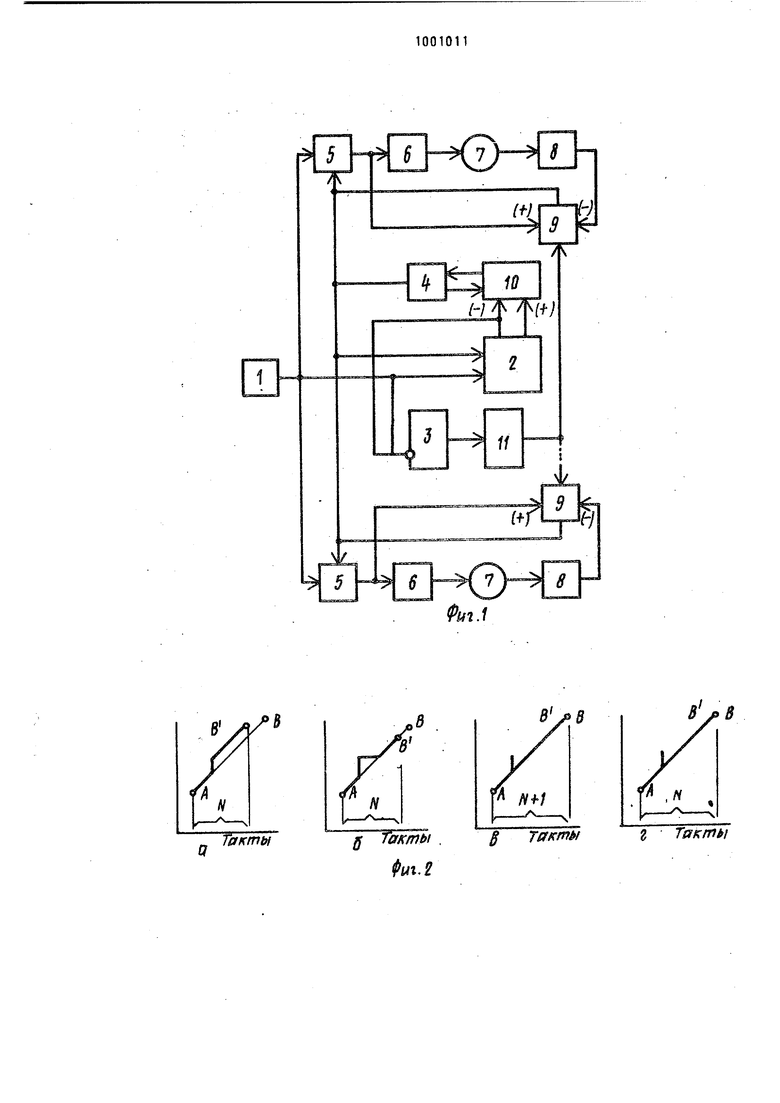
Основная особенность устройства заключается в TOMs что на период коррекции в нем прекращается считывание программы, затем на шаговые двигатели подаются воздействия , возвращающие рабочий орган в ту точку программной траектории, в которой он находился до сбояJ после этого отработка программы возобновляется. На фмго 1 изображена функциональная схема устройства; на фиг. 2 - примеры отработки участка прямой (, а - без кор рекции б с коррекцией на базе уст ройства-прототипа} в - с коррекцией предлагаемым устройством при потере шага 5 г - то же, пр)и лишнем шаге) на фиг, 3 схема под - лючения счетчи. ков координат к задатмикан программой на флг, k схема управления ключом от сметчиков координат. Устройство содержит генератор i им пульсов, ключ 2, элемент И 3, блок k управления, по каждой координате
зторы.х
ьосгояние задатмиков 5 програм;.;
{ КООрДИ
Все О
Соогветстеуют команде блока k управлений
коорОС
Стоп эта координата Реверс остальныеОт
Реверс по этой ко -:оорординате s Стоп остальныеОт
задатчики 5 программы; формирователи 6 команд, шаговые двигатели 7, датчики 8 положения, вторые реверсивные счетчики 9, первый реверсивный счетчи 10, элемент 11 задержки.
На фиг, 2 обозначены: АВ - программная траектория, АВ - фактически отработанная траектория, N - количество тактов программыJ заданное на от-, работку АВ,
Устройство работает следующим образом.
По команде блока k управления за датчики 5 программы устанавливаются , в состояния, COOT ветствующие запрограмг-1Ированным режимам работы шаговых двигателей 7 (Пуск Стоп, Вперед - Назад)J а в первый реверсивный счетчик 10-Программы заносится число N тактов генератора 1 импульсов ; необходимое для отработки очередного кадра программы с тактовый импульс генератора 1 через задатчики 5 программы и формирователи команд 6 поступает на шаговые двигатели 7 и одновременно переводит вторые реверсивные счетчики 9 (координат J A3 нулевого состояния S состояние +1. При поБороте ро
(Состояние ключа 2
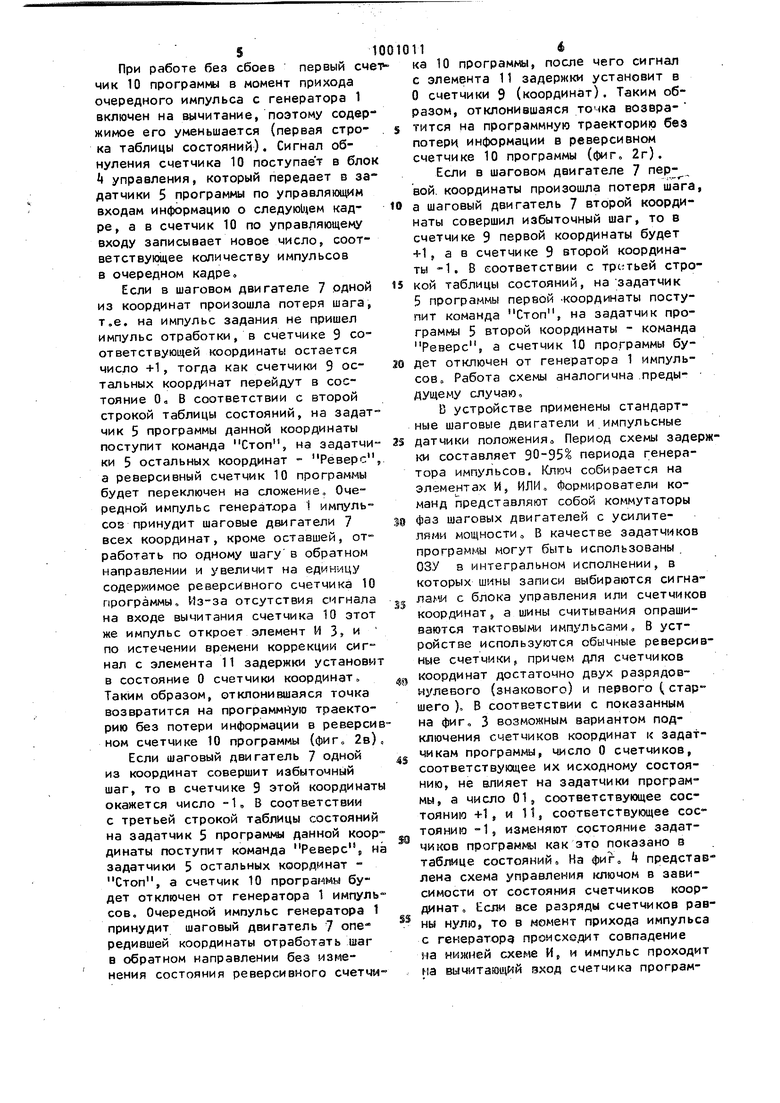
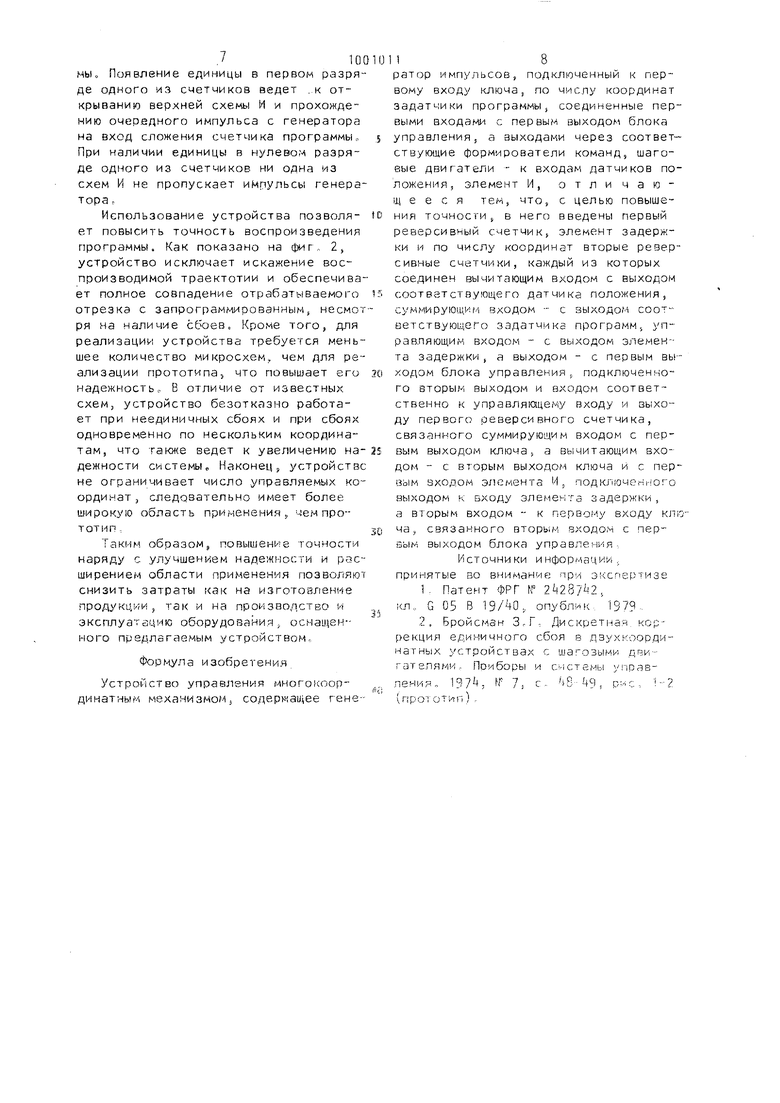
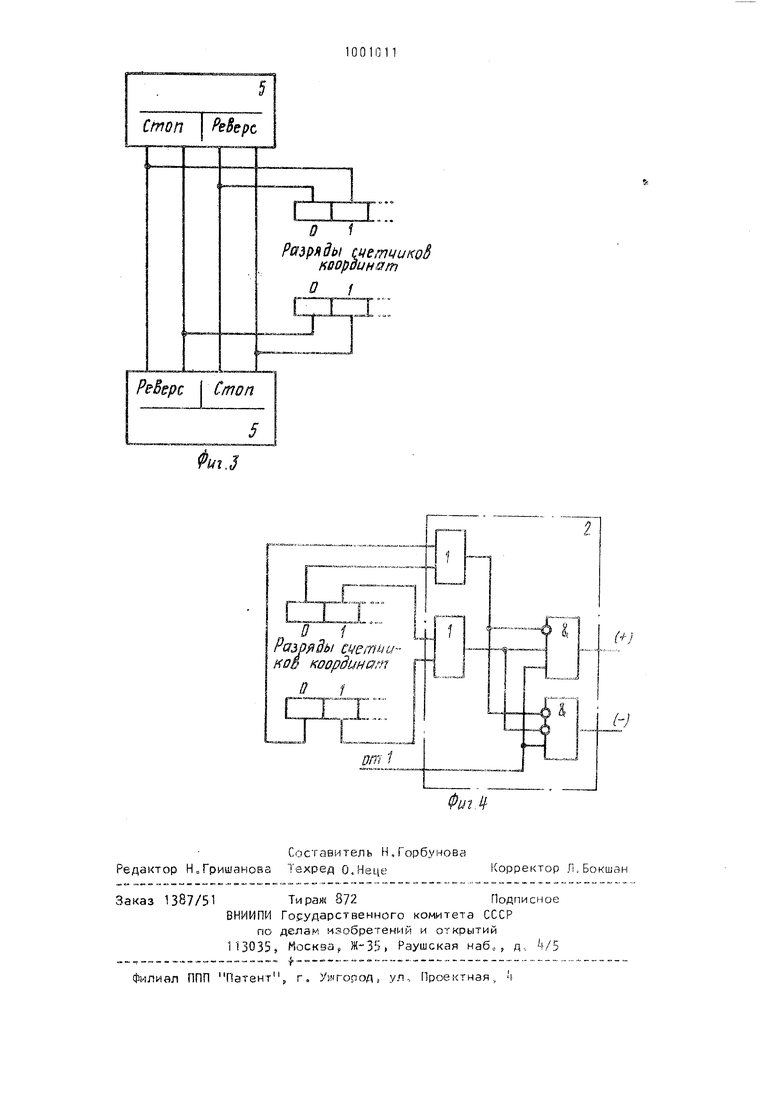
От торов шаговых двигателей 7 на шаг импульсы отработки с аат1-(иков В положения подаются на вь1Ч 1тающи8 входы счетчиков Зв Если на каждый импульс задания приходит импульс отра-бот и i сметчики 9 периодически обнуляются., если происходит потеря шага по одной из координат - в счетчике 9 этой координаты остается число ti; а если отработан лишний шаг - 1 .- Каждому состоянию счетчиков 9 соотаетствует определенное состояние задатчиков программы 5 - ключа 2, с которыми они связаны (см таблицу , при работе без сбоев первый сч чик 10 программы в момент прихода очередного импульса с генератора 1 включен на вычитание, поэтому содер жимое его уменьшается (первая строка таблицы состояний). Сигнал обнуления счетчика 10 поступает в бло управления, который передает в за датчики 5 программы по управлящим входам информацию о следующем кадре, а в счетчик 10 по управляющему входу записывает новое число, соответствующее количеству импульсов в очередном кадре. Если в шаговом двигателе 7 одной из координат произошла потеря шага, т.е. на импульс задания не пришел импульс отработки, в счетчике 9 соответствующей координаты остается число +1, тогда как счетчики 9 остальных координат перейдут в состояние О, В соответствии с второй строкой таблицы состояний, на задат чик 5 программы данной координаты поступит команда Стоп, на задатчи ки 5 остальных координат - Реверс а реверсивный счетчик 10 программы будет переключен на сложение. Очередной импульс генератора 1 импуль cos принудит шаговые двигатели 7 всех координат, кроме оставшей, отработать по одному шагу в обратном направлении и увеличит на единицу содерукимое реверсивного счетчика 10 программы. Из-за отсутствия сигнала на входе вычитания счетчика 10 этот же импульс откроет элемент И 3 и по истечении времени коррекции сигнал с элемента 11 задержки установи в состояние О счетчики координат Таким образом, отклонившаяся точка возвратится на программную траекторию без потери информации в реверси ном счетчике 10 программы (фиго 2в) Если шаговый двигатель 7 одной из координат совершит избыточный шаг, то в счетчике 9 этой координаты окажется число -1, В соответствии с третьей строкой таблицы состояний на задатчик 5 программы данной коор динаты поступит команда Реверс, н задатчики 5 остальных координат , а счетчик 10 программы будет отключен от генератора 1 импуль сов. Очередной импульс генератора 1 принудит шаговый двигатель 7 опередившей координаты отработать шаг в обратном направлении без изменения состояния реверсивного счетчика 10 программы, после чего сигнал с элемента 11 задержки установит в О счетчики 9 (координат). Таким образом, отклонившаяся точка возвратится на программную траекторию без потери информации в реверсивном счетчике 10 программы (фиг, 2г). Если в шаговом двигателе 7 первой, координаты произошла потеря шага, а шаговый двигатель 7 второй координаты совершил избыточный шаг, то в счетчике 9 первой координаты будет fl, а в счетчике 9 второй координаты -1. В соответствии с третьей строкой таблицы состояний, на задатчик 5 программы первой -координаты поступит команда Стоп, на задатчик проrpaMNW 5 второй координаты - команда Реверс, а счетчик 10 программы будет отключен от генератора 1 импульсов Работа схемы аналогична .предыдущему случаю о В устройстве применены стандартные шаговые двигатели и импульсные датчики положения Период схемы задержки составляет 90-95 периода генератора импульсов. Ключ собирается на элементах И, ИЛИ, Формирователи команд представляют собой коммутаторы фаз шаговых двигателей с усилителями мощности, В качестве задатчиков программы могут быть использованы ОЗУ в интегральном исполнении, в которых шкны записи выбираются сигнала ии с блока управления или счетчиков координат, а шины считывания опрашиваются тактовыми импульсами, В устройстве используются обычные реверсивные счетчики, причем для счетчиков координат достаточно двух разрядовиулевого (знакового) и первого ( старшего ), В соответствии с показанным на фиг о 3 возможным вариантом подключения счетчиков координат к зaдatчикам программы, число О счетчиков, соответствующее их исходному состоянию, не влияет на задатчики программы, а число 01J соответствующее состоянию +1, и 11, соответствующее состоянию -Ij изменяют состояние задатчиков программы как это показано в таблице состояний На фиг, представлена схема управления ключом в зависимости от состояния счетчиков координат. Если все разряды счетчиков равны нулю, то в момент прихода импульса с генератору происходит совпадение на нижней схеме И, и импульс проходит на вычитащий эход счетчика програм7lo
мы. Появление единицы в первом разряде одного из счетчиков ведет ..к открыванию верхней схемы И и прохождению очередного импульса с генератора на вход сложения счет1- ика программы „ При наличии единицы в нулевом разряде одного из счетчиков ни одна из схем И не пропускает импульсы генератора .
Использование устройства позволяет повысить точность воспроизведения программы. Как показано на фиг„ 2, устройство исключает искажение воспроизводимой траектотии и обеспечивает полное совпадение отрабатываемого отрезка с запрограммированным; несмотря на наличие сбоев. Кроме того, для реализации устройства требуется меньшее количество микросхем, чем для реализации прототипа, что повышает его надежность,- В отличие от известных схем, устройство безотказно работает при неединичных сбоях и при сбоях одновременно по нескольким координатам, что также ведет к увеличению надежности системы о Наконец, устройстве не ограничивает число управляемых координат, следовательно имеет более широкую область применения,, чем прототип,
Таким образом, погзышение точности наряду с улучшением надежности и расширением области применения позволяют снизить затраты как на изготовление продукции, так и на производство и эксплуатацию оборудования оснащенного предлагаемым устройством
0optiyna изобретения
Устройство управления многокоординатным механизмом S содерьчащее генератор импульсов, подключенный к первому входу ключаJ по числу координат задатчики программы; соединенные первыми входами с первым выходом блока управления, а выходами через соответствующие формирователи команд, шаговые двигатели - к входам датчиков положения, элемент И, о тл и ч а ющ е е с я тем, что, с целью повышения точностиS в него введены первый реверсивный счетчик, элемент задержки и по числу координат вторые реверсивные счетчики, каждый из которых соединен вычитающим входом с выходом соответствующего датчика положения,
СУММ.ИРУЮЩИМ входом - с выходом СООТ
ветствуюш.его задатчика программ управляюш,им входом - с выходом элемента задержки, а выходом - с первым вь ходом блока управления ,, подключенного вторым выходом и входом соответственно к управляюцему входу и выходу первого реверсивного счетчика, связанного суммирующим входом с первым выходом ключа, а вычитающим входом - с вторым выходом ключа и с первым входом элемента И. подключенного выходом к входу элемента задержки, а вторым входом - к первому входу клоча, связанного вторым входом с первым выходом блока управленияИсточни ки и нформации , принятые во внимание npi экспертизе
1 - Патент ФРГ № ,, кл„ G 05 В 19/40, опублик ..
a
ТошЬ ,g TffKin iг TffKinti
Фиг.
CmonVPsBepc
LZLII
о 1
Разряда
KOOpduHSffn
О 1
Реёерс Стоп
