Изобретение относится к горной промышленности в частности к буровым манипуляторам.
Цель изобретения -, повышение про- ияводительности работы за счет повышения точности автоматического выхода mnypQB на одну плоскость
На чертеже показана кинематическая схема предлагаемого манипулятора.
Манипулятор включает бурильную магаину 1, стрелу 20 Следящее устройство выполнено в виде шарнирного многозвенника с базовым трехшарнирным звеном 3, каждый шарнир которого
имеет поводки 4 - 6„ Поводки 4 и 5 крайних по отношению к стреле 2 шарниров непосредственно соединены с основанием 7 при помощи вращательных кинематических пара Поводок 6 среднего шарнира соединен с приводным ползуном 8, который может перемещаться за счет винта 9„ Приводом для винта 9 служит двигатель 10 „ Для наклона бурильной машины использует- ся гидроцилиндр 11„
1 Буровой манипулятор работает следующим образом.
При. включении t привода 10 начинает вращаться винт 9, что приводит в
движение трехгаарнирное ведущее звено 3, которое заставляет двигаться следящее устройство, которое за счет спциально подобранных размеров поводков 4-6 обеспечивает автоматически равномерное перемещение конца стрелы манипулятора по прямой линии А-А„
Формула изобретения
Буровой манипулятор, включающий бурильную машину, стрелу, гидроцилиндр, следящее устройство и приводной ползун, отличающийся тем, что, с целью повышения производительности работы за счет повышения точности автоматического выхода шпуров на одну плоскость, следящее устройство выполнено в виде шарнирного многозвенника с базовым трехшарнирным звеном, каждый шарнир которого имеет поводки, причем поводки крайних по отношению к стреле шарнир непосредственно соединены с основанием посредством вращательных кинематических пар, а поводок среднего шарнира соединен шарнирно с приводным ползуном.
| название | год | авторы | номер документа |
|---|---|---|---|
| БУРОВОЙ МАНИПУЛЯТОР | 2003 |
|
RU2242578C1 |
| БУРОВОЙ МАНИПУЛЯТОР | 1994 |
|
RU2083820C1 |
| Буровой манипулятор | 1987 |
|
SU1608339A1 |
| СКЛАДЫВАЮЩИЙСЯ ШАРНИРНЫЙ ПОДЪЕМНИК ПОДВЕСНОГО ГРУЗА | 2021 |
|
RU2770954C1 |
| УСТРОЙСТВО ДЛЯ СТРУЙНОЙ ОБРАБОТКИ ПОВЕРХНОСТИ НАГРЕВА КОТЕЛЬНОГО АГРЕГАТА | 2005 |
|
RU2289079C1 |
| ПОГРУЗОЧНАЯ МАШИНА | 1991 |
|
RU2042831C1 |
| ГРУЗОПОДЪЕМНЫЙ МАНИПУЛЯТОР | 2020 |
|
RU2737012C1 |
| СКЛАДЫВАЮЩИЙСЯ СИММЕТРИЧНЫЙ МЕХАНИЗМ МАНИПУЛЯТОРА | 2023 |
|
RU2821637C1 |
| ПЛАТФОРМЕННЫЙ СТЫКОВОЧНЫЙ МАНИПУЛЯТОР | 2020 |
|
RU2751781C1 |
| СКЛАДЫВАЮЩИЙСЯ ГРУЗОПОДЪЕМНЫЙ МАНИПУЛЯТОР ПАРАЛЛЕЛЬНОЙ СТРУКТУРЫ | 2021 |
|
RU2780824C1 |
Изобретение относится к горной промышленности. Цель изобретения - повышение производительности манипулятора в работе за счет повышения точности автоматического выхода шпуров на одну плоскость. Буровой манипулятор содержит бурильную машину 1, стрелу 2 гидроцилиндра, следящее устройство и приводной ползун 8, перемещаемый за винт 9 с двигателем 10. Следящее устройство выполнено в виде шарнирного многозвенника с базовым трехшарнирным звеном 3, каждый шарнир которого имеет поводки 4-6. Поводки 4 и 5 крайних по отношению к стреле 2 шарниров непосредственно соединены с основанием 7 при помощи вращательных кинематических пар. Поводок 6 среднего шарнира соединен шарнирно с приводным ползуном 8. При вращении винта 9 приводится в движение трехшарнирное ведущее звено 3, которое заставляет двигаться следящее устройство. За счет специально подобранных размеров поводков 4-6 следящее устройство обеспечивает автоматически равномерное перемещение конца стрелы 2 манипулятора по прямой линии. 1 ил.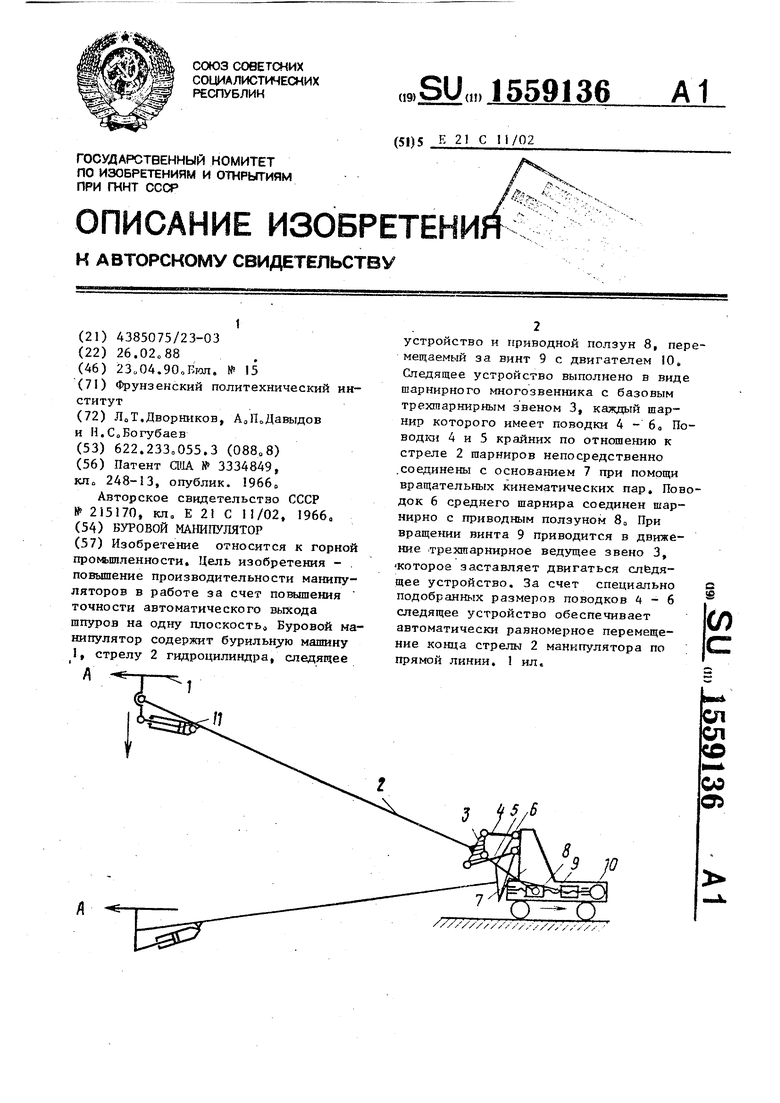
| Патент США 3334849, кЛо 248-13, опублик | |||
| Приспособление для автоматического пере вода трамвайных стрелок | 1929 |
|
SU19660A1 |
