Изобретение относится к платформенным манипуляторам параллельной структуры с увеличенным числом степеней свободы и может найти применение в автоматических линиях для сборки узлов и монтаж агрегатов в стыковочных устройствах космических аппаратов, а также в технологиях, где требуется самоустановка рабочего органа.
Известен платформенный манипулятор с тремя степенями свободы движения рабочего органа, содержащий опорное основание, шарнирно соединенное через три многозвенных параллелограммных механизма с подвижной платформой рабочего органа - аналог (Gavel, В. 1990. United States Patent No. 4,975, 582).
Недостатками известного платформенного манипулятора являются:
1. Сложная конструкция манипулятора содержит большое количество кинематических пар для подвижного соединения множества звеньев.
2. Ограниченная рабочая зона из-за всего трех степеней свободы рабочего органа на выходе манипулятора.
Наиболее близким по технической сущности и достигаемому эффекту к предлагаемому изобретению является платформенный стыковочный манипулятор в виде платформы Стюарта, применяемый в качестве стыковочного устройства космических аппаратов, содержащий опорное основание и подвижную платформу, шарнирно соединенные между собой посредством установленных между ними шести стержневых подвижных опор и 12 сложных сферических шарниров, образующих замкнутую кинематическую цепь с 6 приводными двигателями - прототип (книга Вульфсон И.И. и др. «Механика машин», М: Высшая школа, 1996. С. 28, рис. 1. 20 со схемой «Платформа Стюарта»).
Недостатками указанного платформенного стыковочного манипулятора являются:
1. Сложная конструкция из-за большого количества приводных двигателей, подвижных звеньев и 12 сложных сферических шарниров с высокой трудоемкостью их изготовления и сборки (из-за необходимости пересечения в одной точке всех осей внутренних и внешних сферических поверхностей).
2. Сложная система управления, требующая одновременной зависимой кинематики всех шести приводных двигателей для реализации перемещения рабочего органа в каждом заданном направлении движения.
В основу изобретения положена техническая задача, заключающаяся в упрощении конструкции, снижении трудоемкости изготовления и сборки, а также упрощении системы управления за счет раздельной кинематики приводных двигателей при реализации перемещения рабочего органа в заданном направлении движения.
Получение технического результата достигается за счет того, что в предлагаемом платформенном стыковочном VIP-манипуляторе, содержащем опорное основание, подвижную платформу и установленные между ними стержневые подвижные опоры в составе замкнутой многоконтурной кинематической цепи, опорное основание и подвижная платформа выполнены в виде двух четырехугольников, вершины которых попарно соединены четырьмя приводными стержневыми подвижными опорами посредством крестовин с перпендикулярно расположенными между собой вращательными кинематическими парами, а манипулятор снабжен дополнительным механизмом самоустанавливающейся трехшарнирной платформы, которая кинематически связана с подвижной платформой через три промежуточные стержневые подвижные опоры и шарнирные соединения.
Сущность изобретения поясняется чертежами на фиг. 1, фиг. 2, фиг. 3, фиг. 4 и фиг. 5.
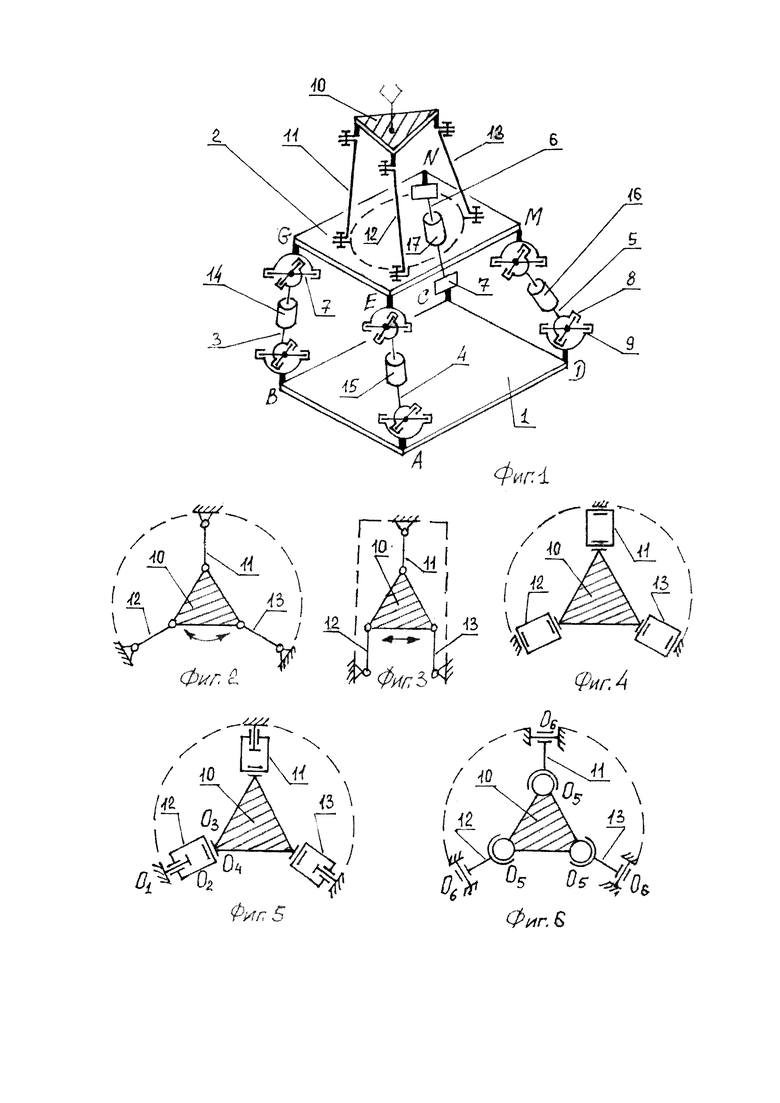
На фиг. 1 изображен общий вид платформенного стыковочного VIP-манипулятора, содержащего опорное основание 1 и подвижную платформу 2, выполненных в виде двух четырехзвенников ABCD и EGNM, вершины которых попарно соединены между собой в замкнутую цепь четырьмя приводными стержневыми подвижными опорами 3, 4, 5 и 6 посредством крестовин 7 с перпендикулярно расположенными между собой вращательными кинематическими парами 8 и 9, а манипулятор снабжен дополнительным механизмом самоустанавливающейся трехшарнирной платформой 10, которая кинематически связана с подвижной платформой 2 через три промежуточные стержневые подвижные опоры 11, 12, 13 и шарнирные соединения, например, в виде вращательных кинематических пар с параллельными между собой осями углового поворота. Приводные стержневыми подвижные опоры 3, 4, 5 и 6 снабжены линейными двигателями, выполненными, например, в виде подвижных приводных гидроцилиндров 14, 15, 16 и 17.
На фиг. 2 представлен вариант симметричной сборки звеньев механизма самоустанавливающейся платформы 10 с параллельными осями вращательных кинематических пар.
На фиг. 3 представлен вариант симметричной сборки платформенного стыковочного манипулятора с установкой промежуточных стержневых опор 11, 12 и 13 самоустанавливающейся платформы 10 параллельно друг другу в горизонтальной плоскости при их сборке с подвижной платформой 2.
На фиг. 4 представлен вариант симметричной сборки звеньев механизма самоустанавливающихся платформы 10 с расположением параллельных осей поворота всех шарниров в горизонтальной плоскости.
На фиг. 5 представлен вариант симметричной сборки звеньев механизма самоустанавливающей платформы 10 с применением двухподвижных кинематических соединенный, состоящих из шарниров с взаимно-перпендикулярными осями O1O2 и O3O4 их углового поворота.
На фиг. 6 представлен вариант симметричной сборки звеньев механизма самоустанавливающейся платформы 10 с выполнением шарнирного соединения между платформами 10 и 2 в виде попарно расположенных на каждой из трех промежуточных стержневых подвижных опор 11, 12, 13 в сочетании сферического шарнира 05, установленного на одном конце каждой опоры, и вращательной кинематической пары 06, установленной на другом конце каждой опоры.
Работа представленного платформенного стыковочного VIP-манипулятора заключается в следующем.
При раздельной подаче рабочей жидкости в каждый из приводных подвижных гидроцилиндров происходит управляемое изменение длины приводных подвижных стержневых опор 3 или 4 или 5 или 6, что обеспечивает раздельную кинематику движения подвижной платформы по каждой из четырех степеней свободы манипулятора, которая дополняется пятой степенью свободы рабочего органа (например, в виде стыковочного узла) за счет плавающего перемещения самоустанавливающей платформы 10. В результаты этого необходимые пять степеней свободы перемещения рабочего органа манипулятора достигаются простым раздельным управлением только четырьмя линейными двигателями 14, 15, 16 и 17.
Достигаемый в предлагаемом платформенном стыковочном VIP-манипуляторе положительный эффект заключается в следующем:
1. Упрощается конструкция и упрощается система управления манипулятором с пятью степенями свободы за счет раздельной кинематики только четырех приводных двигателей.
2. Повышается точность и надежность стыковки собираемых в единый узел объектов за счет дополнительной плавающей степени свободы механизма самоустанавливающейся платформы, определяемой конфигурацией стыкуемых объектов.
| название | год | авторы | номер документа |
|---|---|---|---|
| СИММЕТРИЧНЫЙ ПЛАТФОРМЕННЫЙ МАНИПУЛЯТОР С ТРЕМЯ СТЕПЕНЯМИ СВОБОДЫ | 2021 |
|
RU2776578C1 |
| ПЛАТФОРМЕННЫЙ РОБОТ | 2020 |
|
RU2751778C1 |
| ПЛАТФОРМЕННЫЙ МЕХАНИЗМ ОТНОСИТЕЛЬНОГО МАНИПУЛИРОВАНИЯ | 2021 |
|
RU2758391C1 |
| ПЛОСКО-ПРОСТРАНСТВЕННЫЙ ТРЕХПЛАТФОРМЕННЫЙ МАНИПУЛЯТОР | 2021 |
|
RU2774279C1 |
| ПЛАТФОРМЕННЫЙ МАНИПУЛЯТОР С ТРЕМЯ СТЕПЕНЯМИ СВОБОДЫ | 2020 |
|
RU2751780C1 |
| ПЛОСКО-ПРОСТРАНСТВЕННЫЙ ПЛАТФОРМЕННЫЙ МАНИПУЛЯТОР С ИЗБЫТОЧНЫМ ПРИВОДОМ | 2021 |
|
RU2782460C1 |
| ПЛАТФОРМЕННЫЙ МАНИПУЛЯТОР | 2020 |
|
RU2758607C1 |
| ПРОСТРАНСТВЕННЫЙ ПЛАТФОРМЕННЫЙ VIP-МАНИПУЛЯТОР | 2019 |
|
RU2722165C1 |
| ТРЁХПЛАТФОРМЕННЫЙ МАНИПУЛЯТОР ОТНОСИТЕЛЬНОГО МАНИПУЛИРОВАНИЯ | 2024 |
|
RU2835540C1 |
| ШАРНИРНЫЙ МЕХАНИЗМ | 2021 |
|
RU2753064C1 |
Изобретение относится к машиностроению, в частности к робототехнике, и может быть использовано в автоматических линиях для сборки деталей узлов и монтажа агрегатов. Платформенный стыковочный манипулятор содержит опорное основание, подвижную платформу и самоустанавливающуюся трехшарнирную платформу. Опорное основание и подвижная платформа выполнены в форме четырехугольников, вершины которых попарно соединены четырьмя приводными стержневыми подвижными опорами посредством крестовин с перпендикулярно расположенными вращательными кинематическими парами. Самоустанавливающаяся трехшарнирная платформа кинематически связана с подвижной платформой посредством трех промежуточных стержневых подвижных опор и шарнирных соединений. В результате обеспечивается упрощение конструкции и управления манипулятором, а также повышение его точности и надежности. 7 з.п. ф-лы, 6 ил.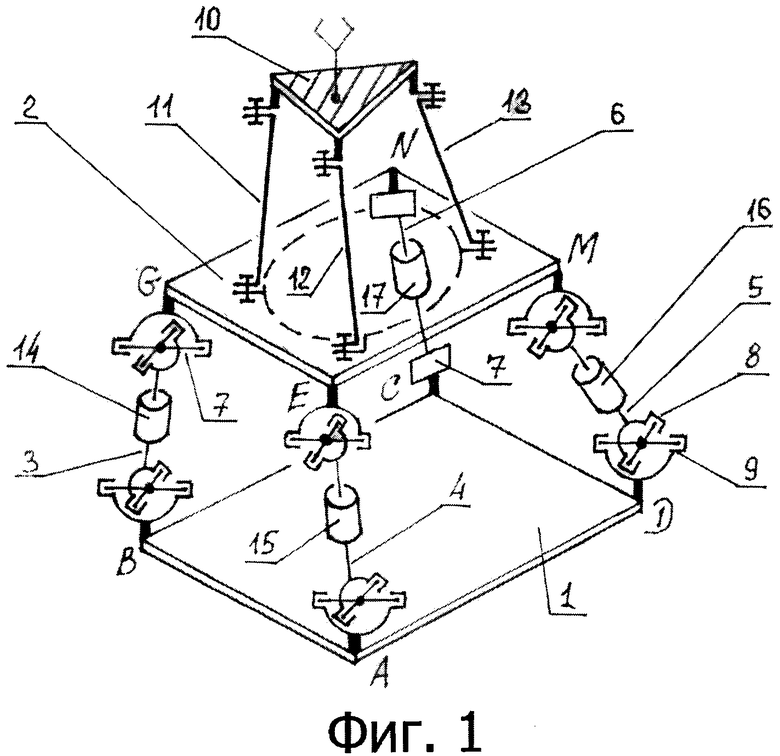
1. Платформенный стыковочный манипулятор, содержащий опорное основание и подвижную платформу, шарнирно соединенные между собой посредством установленных между ними стержневых подвижных опор, образующих с опорным основанием и подвижной платформой замкнутую многоконтурную кинематическую цепь, отличающийся тем, что он снабжен самоустанавливающейся трехшарнирной платформой, опорное основание и подвижная платформа выполнены в форме четырехугольников, вершины которых попарно соединены четырьмя приводными стержневыми подвижными опорами посредством крестовин с перпендикулярно расположенными вращательными кинематическими парами, а самоустанавливающаяся трехшарнирная платформа кинематически связана с подвижной платформой посредством трех промежуточных стержневых подвижных опор и шарнирных соединений.
2. Манипулятор по п.1, отличающийся тем, что шарнирные соединения выполнены в виде вращательных кинематических пар с параллельными осями углового поворота.
3. Манипулятор по п. 1, отличающийся тем, что промежуточные стержневые подвижные опоры самоустанавливающейся платформы выполнены одинаковой длины и установлены параллельно друг другу в одном направлении с образованием с самоустанавливающейся платформой сдвоенного шарнирного параллелограмма.
4. Манипулятор по п. 1, отличающийся тем, что промежуточные стержневые подвижные опоры самоустанавливающейся платформы установлены параллельно друг другу в горизонтальной плоскости в сборке с подвижной платформой манипулятора.
5. Манипулятор по п. 1, отличающийся тем, что шарнирные соединения выполнены в виде двухподвижных кинематических соединений, состоящих из шарниров с взаимно-перпендикулярными осями их углового поворота.
6. Манипулятор по п. 1, отличающийся тем, что шарнирные соединения выполнены в виде сферического шарнира, расположенного на одном конце каждой из промежуточных стержневых подвижных опор, и вращательной кинематической пары, расположенной на другом конце каждой из промежуточных стержневых подвижных опор.
7. Манипулятор по п. 1, отличающийся тем, что промежуточные стержневые подвижные опоры выполнены в виде изогнутых гибких пластин, шарнирно соединенных по концам с самоустанавливающейся платформой с одной стороны и с подвижной платформой с другой стороны.
8. Манипулятор по п. 1, отличающийся тем, что приводные стержневые подвижные опоры снабжены линейными двигателями, например, в виде подвижных приводных гидроцилиндров.
| СПОСОБ ПОЛУЧЕНИЯ гуминовых кислот | 0 |
|
SU198352A1 |
| 0 |
|
SU191807A1 | |
| ПРОСТРАНСТВЕННЫЙ ПЛАТФОРМЕННЫЙ VIP-МАНИПУЛЯТОР | 2019 |
|
RU2722165C1 |
| US 4976582 A1, 11.12.1990 | |||
| US 7367772 B2, 06.05.2008. | |||

