Изобретение относится к пневмогид- ромашиностроению и может быть использовано в качестве исполнительного органа пневмогидросистем промышленных роботов или манипуляторов.
Целью изобретения является упрощение конструкции.
На фиг. 1 схематично изображен предлагаемый пневмодвигатель, продольн ное сечение; на фиг. 2 - сечение А-А на фиг. 1.
Пневмодвигатель содержит корпус 1 с отверстиями 2-5 подвода-отвода рабочей среды, размещенный в корпусе 1 вал 6, ротор 7 и роторные втулки 8 и 9 с лопастями 10 и 11, установленные на валу 6 с образованием рабочих полостей 12 и 135 механизм фиксации лопастей, состоящий из фиксаторов, взаимодействующих с храповыми колесами , установленными на валу б и корпусе 1. Механизм фиксации снабжен приводом, выполненным в виде пневмо- цилиндров 18 и 195 установленных на втулках 8 и 9, при этом фиксаторы выполнены в виде подпружиненных рычагов 20 и 21, установленных на втулках 8 и 9 с возможностью качания и попере
тельно корпуса 1. Под действием давления рабочей среды лопасть 10 поворачивается совместно с валом 6. После полного поворота управляющее устройство соединяет отверстия 2 и k с атмосферой и подает рабочую среду через отверстия 3 и 5 в каналы 23 и 25. Рабочая среда поступает в полости пневмоцилиндра 18 и рабочую полость 13« Плунжер пневмоцилиндра 18 выдвигается и нажимает на рычаг 20, вводя в зацепление через рычаг 20 роторную втулку 8 с храповым колесом И, высвобождая из зацепления храповое колесо 16 и, следовательно, вал 6, Рычаг 21 под действием пружины входит в зацепление с храповым колесом 17 соединяя втулку 9 с валом 6. Под действием рабочей среды в полости 13 лопасть 11 поворачивается совместно с валом 6, После полного поворота процесс повторяется.
5
0
25 Формула изобретения
Пневмодвигатель, содержащий корпус с отверстиями подвода-отвода рабочей среды, размещенный в корпусе вал,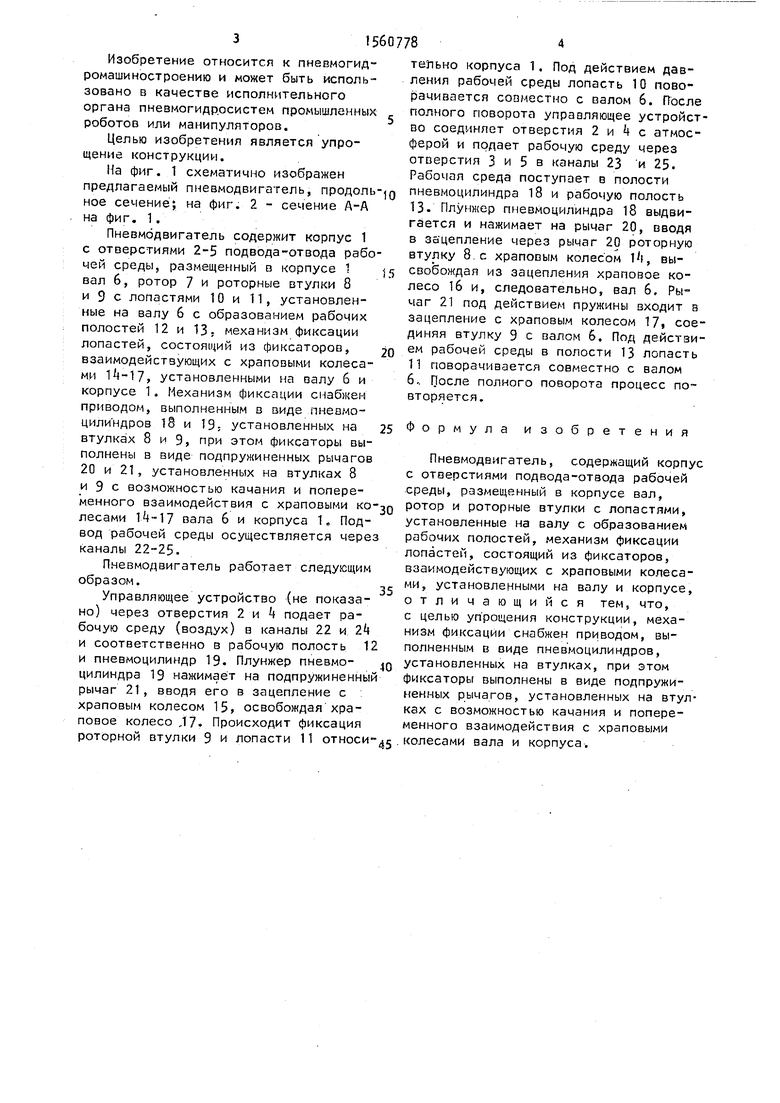
| название | год | авторы | номер документа |
|---|---|---|---|
| Пневмопривод прерывистого вращательного движения | 1985 |
|
SU1307105A1 |
| Устройство для демонтажа футеровки алюминиевых электролизеров | 1981 |
|
SU1011736A1 |
| Контейнер для транспортировки и хранения подшипниковой опоры турбохолодильника | 1981 |
|
SU1116237A1 |
| Устройство для обработки внутренних поверхностей | 1983 |
|
SU1162574A1 |
| Устройство для загрузки плоских изделий,преимущественно заготовок радиодеталей | 1985 |
|
SU1307619A1 |
| РОТОРНО-ПОРШНЕВОЙ ДВИГАТЕЛЬ | 2004 |
|
RU2272911C1 |
| МЕХАНИЗМ ПРЕОБРАЗОВАНИЯ ВОЗВРАТНО-ПОСТУПАТЕЛЬНОГО ПРЯМОЛИНЕЙНОГО ДВИЖЕНИЯ В НАПРАВЛЕННОЕ ВРАЩАТЕЛЬНОЕ | 1992 |
|
RU2036358C1 |
| УСТАНОВКА ДЛЯ ИЗМЕЛЬЧЕНИЯ ИЗНОШЕННЫХ ПОКРЫШЕК | 1993 |
|
RU2042510C1 |
| ЛОПАСТНОЙ ДВИГАТЕЛЬ ВНУТРЕННЕГО СГОРАНИЯ | 2005 |
|
RU2285123C1 |
| НИТКОШВЕЙНАЯ МАШИНА И ЕЕ ШВЕЙНЫЙ МЕХАНИЗМ, МЕХАНИЗМ ПЕРЕНОСА НИТИ, МЕХАНИЗМ ПРОКОЛА И НИТЕПРОВОДЯЩИЙ МЕХАНИЗМ | 2004 |
|
RU2283774C2 |

Изобретение может быть использовано в качестве исполнительного органа пневмогидросистем промышленных роботов или манипуляторов. Цель изобретения - упрощение конструкции. Пневмодвигатель содержит корпус (К) 1 с отверстиями 2-5 подвода-отвода рабочей среды, размещенный в К 1 вал (В) 6, ротор 7 и роторные втулки (РВ) 8 и 9 с лопастями 10 и 11, установленные на В 6 с образованием рабочих полостей, механизм фиксации лопастей, состоящий из фиксаторов, взаимодействующих с храповыми колесами 14-17, установленными на В 6 и К 1. Механизм фиксации снабжен приводом, выполненным в виде пневмоцилиндров 18 и 19, установленных на РВ 8 и 9, при этом фиксаторы выполнены в виде подпружиненных рычагов 20 и 21, установленных на РВ 8 и 9 с возможностью качания и попеременного взаимодействия с колесами 14-17. 2 ил.
менного взаимодействия с храповыми ко-эд ротор и роторные втулки с лопастями,
35
лесами Й-17 вала 6 и корпуса 1. Подвод рабочей среды осуществляется через каналы 22-25.
Пневмодвигатель работает следующим образом.
Управляющее устройство (не показано) через отверстия 2 и k подает рабочую среду (воздух) в каналы 22 и 2k и соответственно в рабочую полость 12 и пневмоцилиндр 19. Плунжер пневмо- до цилиндра 19 нажимает на подпружиненный рычаг 21, вводя его в зацепление с храповым колесом 15, освобождая храповое колесо.17. Происходит фиксация
установленные на валу с образованием рабочих полостей, механизм фиксации лопастей, состоящий из фиксаторов, взаимодействующих с храповыми колесами, установленными на валу и корпусе, отличающийся тем, что, с целью упрощения конструкции, механизм фиксации снабжен приводом, выполненным в виде пневмоцилиндров, установленных на втулках, при этом фиксаторы выполнены в виде подпружиненных рычагов, установленных на втул ках с возможностью качания и попеременного взаимодействия с храповыми
роторной втулки 9 и лопасти 11 относи- колесами вала и корпуса.
ротор и роторные втулки с лопастями,
установленные на валу с образованием рабочих полостей, механизм фиксации лопастей, состоящий из фиксаторов, взаимодействующих с храповыми колесами, установленными на валу и корпусе, отличающийся тем, что, с целью упрощения конструкции, механизм фиксации снабжен приводом, выполненным в виде пневмоцилиндров, установленных на втулках, при этом фиксаторы выполнены в виде подпружиненных рычагов, установленных на втулках с возможностью качания и попеременного взаимодействия с храповыми
12
а-А
Я
Фиг. 2
| Авторское свидетельство СССР № , кл | |||
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| ( ПНЕВМОДВИГАТЕЛЬ | |||
