1
загрузки, кинематически соединен со штоком 6 стола 7 для размещения стопы изделий 4. Он выполнен в виде .установленного на валу 1 ротора 2 кулачка (К) 34 с винтовьм пазом 35, на нижней части которого размещен упругий элемент 36 в виде пластинчатой пружины. На валу I под К 34 имеется бурт 41, под которым установлен хра- повый М в виде шарнирно закрепленных н а валу рычагов (Р) 42, расположенных тангенциально валу 1, они подпружинены пружинами 43, их количество равно количеству кассет 3, установI
Изобретение относится к устройствам дпя подачи плоских изделий, преимущественно заготовок радиодеталей.
Цель изобретения - упрощение конструкции устройства.
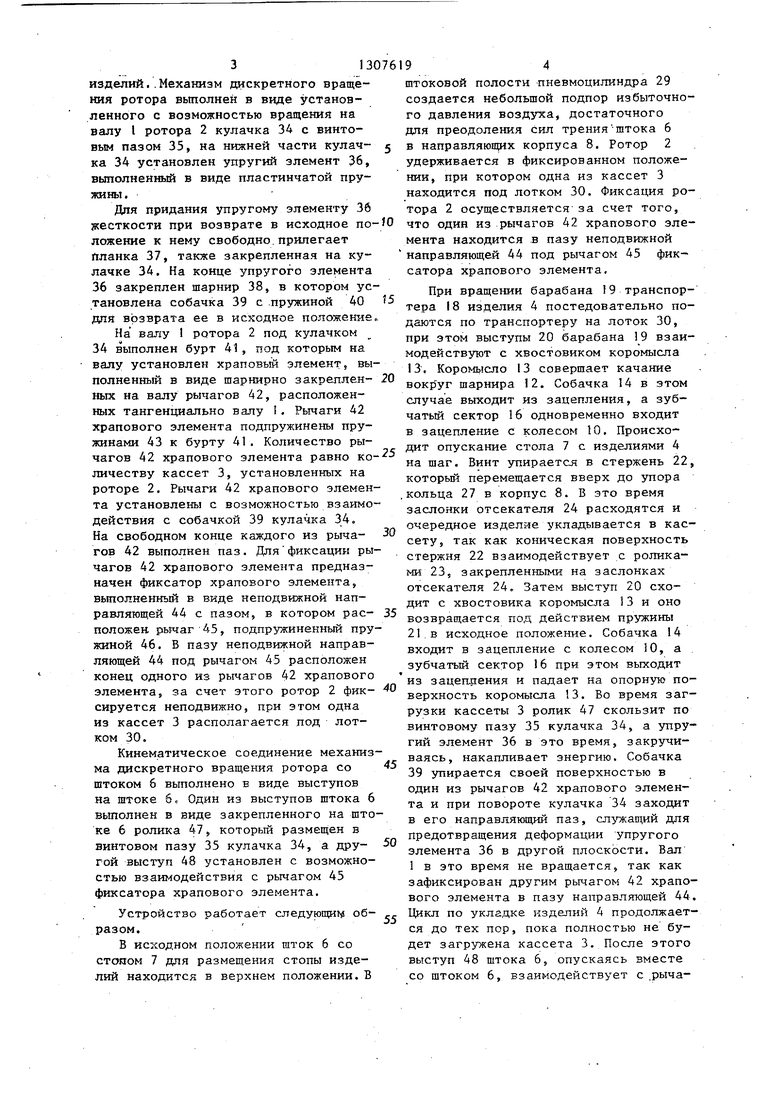
На фиг,1 показано предлагаемое устройство, общий вид, разрез; на фиг.2 - то же, вид сверху; на фиг.3 - разрез А-А на фиг.1; на фиг.4 - вид Б на фиг.З; на фиг.5 - разрез В-В на фиг.3.
Устройство для загрузки плоских изделий содержит установленный на валу 1 ротор 2 с кассетами 3 для изделий 4 Кассеты 3 установлены равномерно по окружности ротора 2 параллельно его оси вращения и закреплены на нем при помопщ захватов 5. Механизм укладки изделий в кассеты выполнен в виде щтока 6 со столом 7 для размещения стопы изделий, установленным в корпусе 8 с возможностью возвратно-поступательного перемещения, щток 6 выполнен в виде зубчатой рейки, соединяемой с шестерней 9. С шестерней 9 жестко связано зубчатое .колесо 10. Оба они установлены на оси II. В корпусе 8 на шарнире 12 установлено коромысло 13, на одном плече которого установлена собачка 14, подпружиненная пружиной 15 и входящая в зацепление с колесом 10, а на другом шарнирно установлен зубчатый, сектор 16, снабженный регулируе- мым упором I7, служапщм для настройки механизма опускания Стопы на различный шаг. Для подачи изделий 4
19
ленных на роторе 2, и они взаимодействуют с собачкой 39 К 34, Фиксатор храпового М выполнен в виде неподвижной направляющей 44 с пазом, в котором размещены подпружиненный пружиной 46 Р 45 и конец одного из Р 42 храпового М. Кинематическое соединение М дискретного вращения ротора со штоком 6 выполнено в виде выступов на штоке 6, один из которых в виде ролика 47 размещен в винтовом пазу 35 К 34 , а другой вы - ступ 48 взаимодействует Р 45 . 5 ил.
5
предназначен транспортер 18. Барабан 19 транспортера 18 выполнен с высту- .пами 20, равномерно размещенными по окружности барабана и установленными 5 с возможностью взаимодействия с коромыслом 13. Качание коромысла 13 осуществляется от выступов 20, закрепленных на барабане 19 транспортера 18, и пружины 21. Регулировка зацепления собачки 14 с колесом 10 осуществляется винтом (31), а зубчатого сектора 16 - регулировкой высоты выступов 20, которые могут быть выполнены в виде пальцев с резьбой. Упор 17 взаимодействует периодически со стержнем 22, имеющим на конце коническую поверхность, которой он взаимодействует с роликами 23, закрепленными на заслонках отсекателя 24. Заслонки отсекателя 24, имеющие возможность поворота вокруг осей 25, стягиваются пружиной 26. Ход толкателя ограничивается кольцом 27.
г Шток 6 механизма укладки изделий в кассеты соединен с поршнем 28 пнев- моцилиндра 29. Для подачи изделий с транспортера 18 на стол 7 механизма укладки изделий в кассеты предназна- чей лоток 30, закрепленньй на кронштейне 32. На конце лотка 30 установлен амортизатор 33. Устройство содержит также механизм дискретного вращения ротора, предназначенный для подачи следующей кассеты на позицию
-5 загрузки. Механизм дискретного вращения ротора кинематически соединен со iuTOKOM 6 стола 7 для размещения стопы
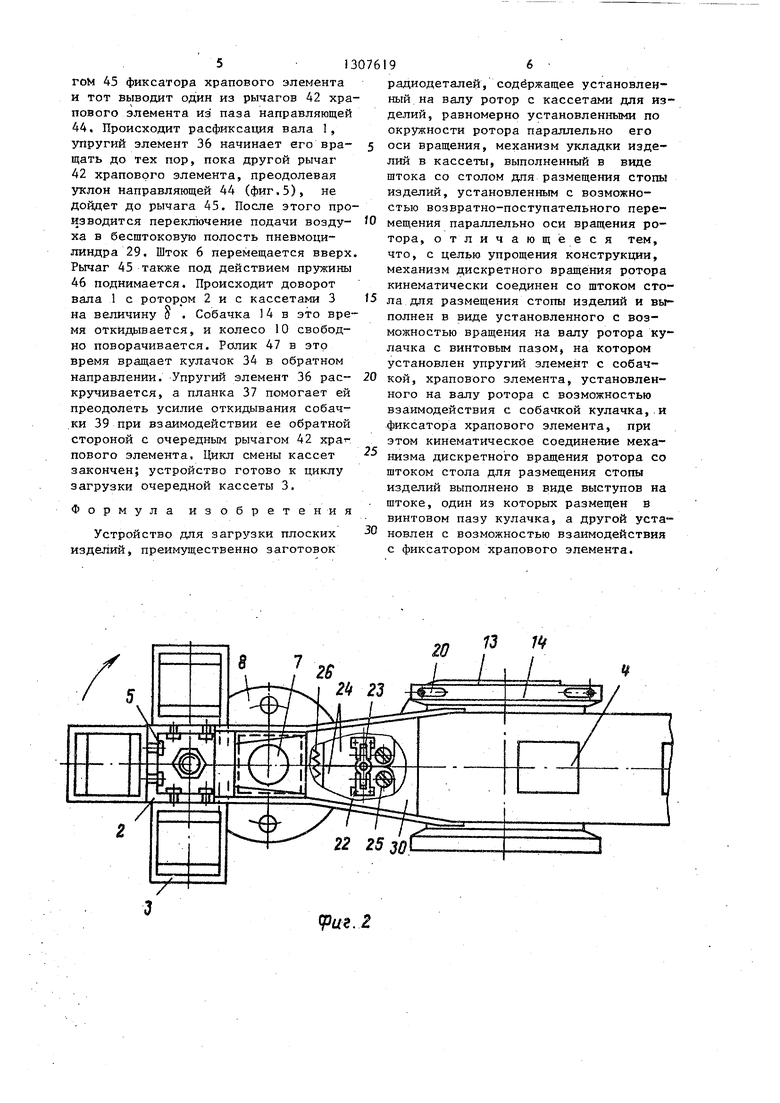
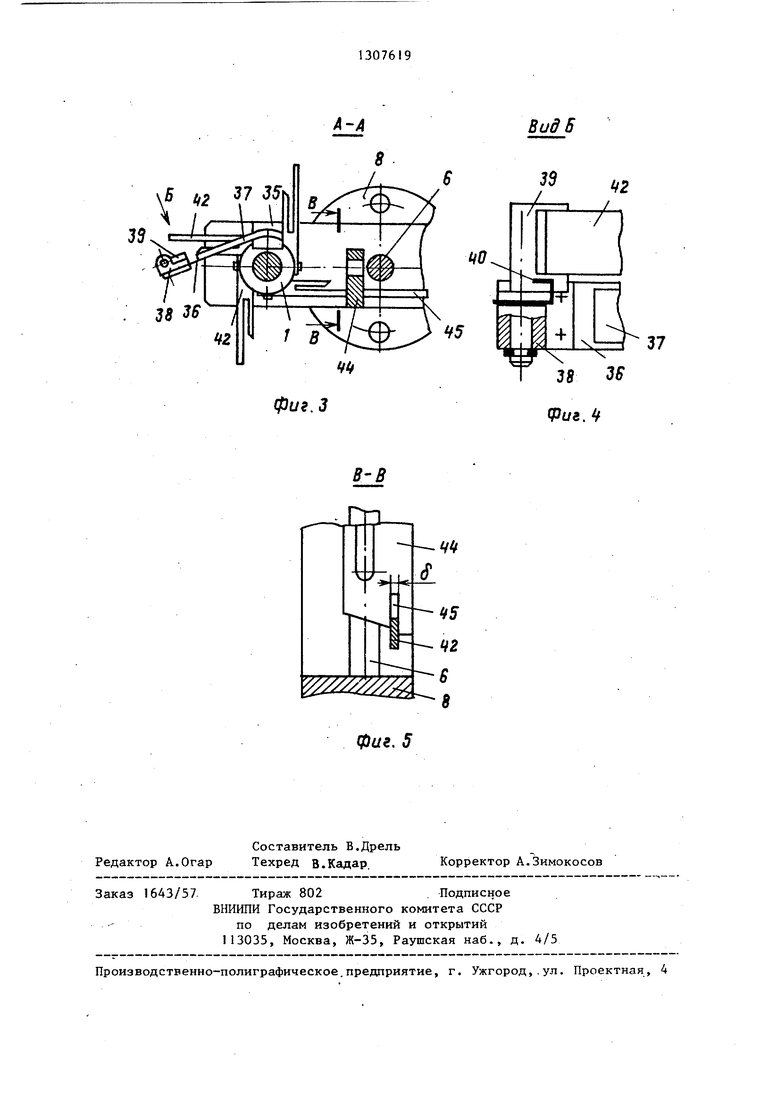
изделий..Механизм дискретного вращения ротора вьтолнен в виде установленного с возможностью вращения на валу I ротора 2 кулачка 34 с винтовым пазом 35, на нижней части кулачка 34 установлен упругий элемент 36, выполненный в виде пластинчатой пружины.
Для придания упругому элементу 36 жесткости при возврате в исходное по ложение к нему свободно прилегает планка 37, также закрепленная на кулачке 34. На конце упругого элемента 36 закреплен шарнир 38, в котором ус тановлена собачка 39 с .пружиной 40 для возврата ее в исходное положение
На валу 1 ротора 2 под кулачком 34 выполнен бурт 41, под которым на валу установлен храповый элемент, вы полненный в виде шарнирно закрепленных на валу рычагов 42, расположенных тангенциально валу I. Рычаги 42 храпового элемента подпружинены пружинами 43 к бурту 41. Количество рычагов 42 храпового элемента равно ко личеству кассет 3, установленных на роторе 2, Рычаги 42 храпового элемен та установлены с возможностью взаимодействия с собачкой 39 кулачка 34. На свободном конце каждого из рычагов 42 выполнен паз. Для фиксации рычагов 42 храпового элемента предназначен фиксатор храпового элемента, вьтолненный в виде неподвижной направляющей 44 с пазом, в котором расположен рычаг 45, подпружиненный пру жиной 46. Б пазу неподвижной направляющей 44 под рычагом 45 расположен конец одного из рычагов 42 храпового элемента, за счет этого ротор 2 фиксируется неподвижно, при этом одна из кассет 3 располагается под лотком 30.
Кинематическое соединение механиз ма дискретного вращения ротора со штоком 6 выполнено в виде выступов на штоке 6 Один из выступов штока 6 выполнен в виде закрепленного на што ке 6 ролика 47, который размещен в винтовом пазу 35 кулачка 34, а другой выступ 48 установлен с возможностью взаимодействия с рычагом 45 фиксатора храпового элемента.
Устройство работает следующи образом.
В исходном положении шток 6 со стоном 7 для размещения стопы изделий находится в верхнем положении.В
W
15
20
25
30
35
40
45
50
55
штоковой полости пневмоцилиндра 29 создается небольшой подпор избыточного давления воздуха, достаточного для преодоления сил трения штока 6 в направляющих корпуса 8. Ротор 2 удерживается в фиксированном положении, при котором одна из кассет 3 находится под лотком 30. Фиксация ротора 2 осуществляется за счет того, что один из рычагов 42 храпового элемента находится в пазу неподвижной направляющей 44 под рычагом 45 фиксатора храпового элемента.
При вращении барабана 19 транспортера 18 изделия 4 постедовательно подаются по транспортеру на лоток 30, при этом выступы 20 барабана 9 взаимодействуют с хвостовиком коромысла 13. Коромь сло 13 совершает качание вокр уг шарнира 12. Собачка 14 в этом случае выходит из зацепления, а зубчатый сектор 16 одновременно входит в зацепление с колесом 10. Происходит опускание стола 7 с изделиями 4 на шаг. Винт упирается в стержень 22, который перемещается вверх до упора .кольца 27 в корпус 8. В это время заслонки отсекателя 24 расходятся и очередное изделие укладывается в кассету, так как коническая поверхность стержня 22 взаимодействует с роликами 23, закрепленными на заслонках отсекателя 24. Затем выступ 20 сходит с хвостовика коромысла 13 и оно возвращается под действием пружины 21.в исходное положение. Собачка 14 входит в зацепление с колесом 10, а зубчатый сектор 16 при этом выходит из зацепления и падает на опорную поверхность коромысла 3. Во время загрузки кассеты 3 ролик 47 скользит по винтовому пазу 35 кулачка 34, а упругий элемент 36 в это время, закручиваясь, накапливает энергию. Собачка 39 упирается своей поверхностью в один из рычагов 42 храпового элемента и при повороте кулачка 34 заходит в его направляющий паз, служащий для предотвращения деформации упругого элемента 36 в другой плоскости. Вал 1 в это время не вращается, так как зафиксирован другим рычагом 42 храпового элемента в пазу направляющей 44. Цикл по укладке изделий 4 продолжается до тех пор, пока полностью не будет загружена кассета 3. После этого выступ 48 штока 6, опускаясь вместе со штоком 6, взаимодействует с .рычагом 45 фиксатора храпового элемента и тот выводит один из рычагов 42 храпового элемента из паза направляющей 44, Происходит расфиксация вала 1, упругий элемент 36 начинает его вращать до тех пор, пока другой рычаг 42 храпового элемента, преодолевая уклон направляющей 44 (фиг.5), не дойдет до рычага 45. После этого производится переключение подачи воздуха в бесштоковую полость пневмоци- линдра 29. Шток 6 перемещается вверх. Рычаг 45 также под действием пружины 46 поднимается. Происходит доворот вала 1 с ротором 2 и с кассетами 3 на величину О . Собачка 14 в это время откидывается, и колесо 10 свободно поворачивается. Ролик 47 в это время вращает кулачок 34 в обратном направлении. Упругий элемент 36 раскручивается, а планка 37 помогает ей преодолеть усилие откидывания собач- .ки 39 при взаимодействии ее обратной стороной с очередным рычагом 42 храг пового элемента, Цикл смены кассет закончен; устройство готово к циклу загрузки очередной кассеты 3.
Формула изобретения
Устройство для загрузки плоских изделий, преимущественно заготовок
радиодеталей, содержащее установленный на валу ротор с кассетами для изделий, равномерно установленными по окружности ротора параллельно его оси вращения, механизм укладки изделий в кассеты, выполненный в виде штока со столом для размещения стопы изделий, установленным с возможностью возвратно-поступательного перемещения параллельно оси вращения ротора, отличающееся тем, что, с целью упрощения конструкции, механизм дискретного вращения ротора кинематически соединен со щтоком сто5 ла для размещения стопы изделий и выполнен в виде установленного с возможностью вращения на валу ротора кулачка с винтовым пазом, на котором установлен упругий элемент с собач0 кой, храпового элемента, установленного на валу ротора с возможностью взаимодействия с собачкой кулачка,.и фиксатора храпового элемента, при этом кинематическое соединение механизма дискретного вращения ротора со штоком стола для размещения стопы изделий выполнено в виде выступов на штоке, один из которых размещен в винтовом пазу кулачка, а другой установлен с возможностью взаимодействия с фиксатором храпового элемента.
5
0
| название | год | авторы | номер документа |
|---|---|---|---|
| Автоматизированный комплекс для штамповки | 1985 |
|
SU1291253A1 |
| Транспортно-технологический ротор | 1988 |
|
SU1586795A1 |
| Станок для сборки узлов запрессовкой | 1978 |
|
SU745642A1 |
| Каретка кривовязюка к устройству дляВыРубКи зАгОТОВОК из пОлОСОВОгОМАТЕРиАлА | 1979 |
|
SU841732A1 |
| Устройство для поштучной выдачи деталей | 1988 |
|
SU1608000A1 |
| УСТРОЙСТВО ДЛЯ ИЗГОТОВЛЕНИЯ ИЗ КОНСТАНТАНОВОЙ ПРОВОЛОКИ СКОБОК И ВСТАВКИ ИХ В АСБЕСТОВЫЕ КОРОБКИ ТЕРМОБЛОКОВ | 1956 |
|
SU108681A1 |
| Устройство для отделения верхней заготовки от стопы и подачи ее в зону обработки | 1981 |
|
SU946744A1 |
| Устройство к прессу для смены технологической оснастки | 1989 |
|
SU1669764A1 |
| Устройство для укладки ампул в кассету | 1988 |
|
SU1622224A1 |
| УСТРОЙСТВО ДЛЯ УКЛАДКИ ИЗДЕЛИЙ ПРЕИМУЩЕСТВЕННО В МНОГОРЯДОВНЫЕ КАССЕТЫ | 1989 |
|
RU2013899C1 |
Изобретение относится к области микроэлектроники. Цель - упрощение конструкции устройства для загрузки плоских изделий, преимущественно заготовок радиодеталей. Для ее достижения механизм (М) дискретного вращения ротора, предназначенный для подачи следующей кассеты 3 на позицию (Л
и.2
13 74f
К А
Вид 6
| Авторское свидетельство ССР № 11224373, кл | |||
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
