Изобретение относится к медицинской технике, а именно к травматологии и ортопедии.
Цель изобретения - сокращение вре- мени проведения операции путем сосредоточения всех репозиционных манипуляций в одном месте аппарата.
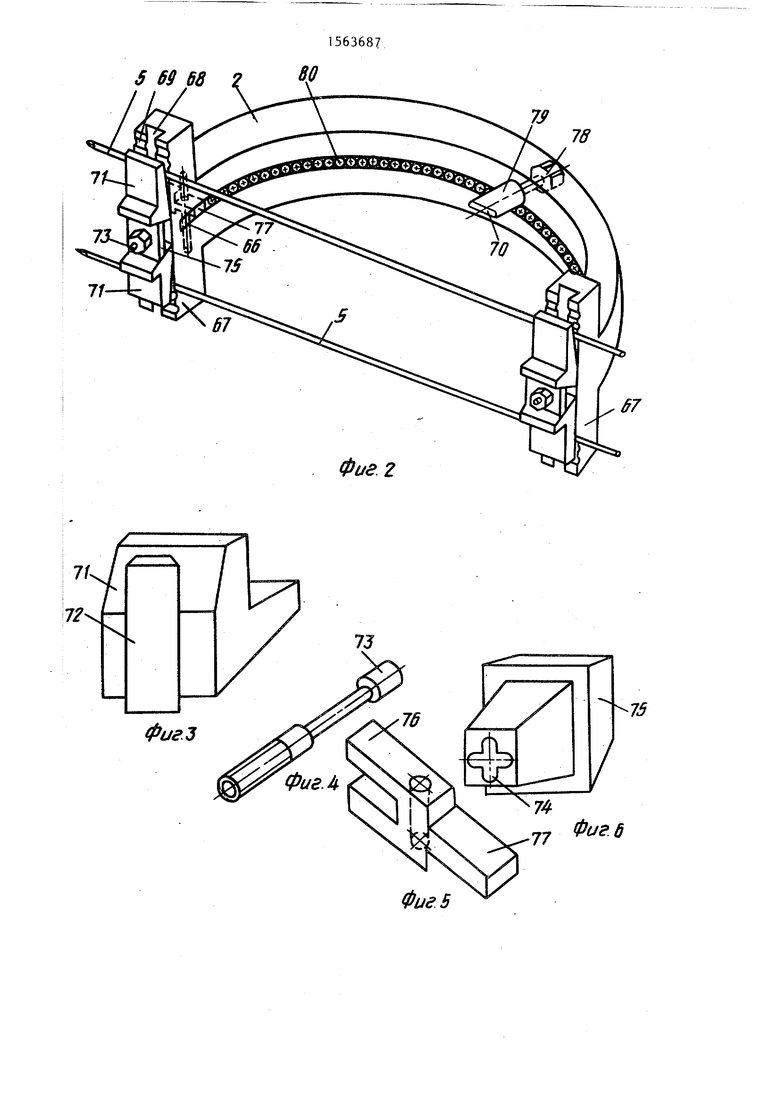
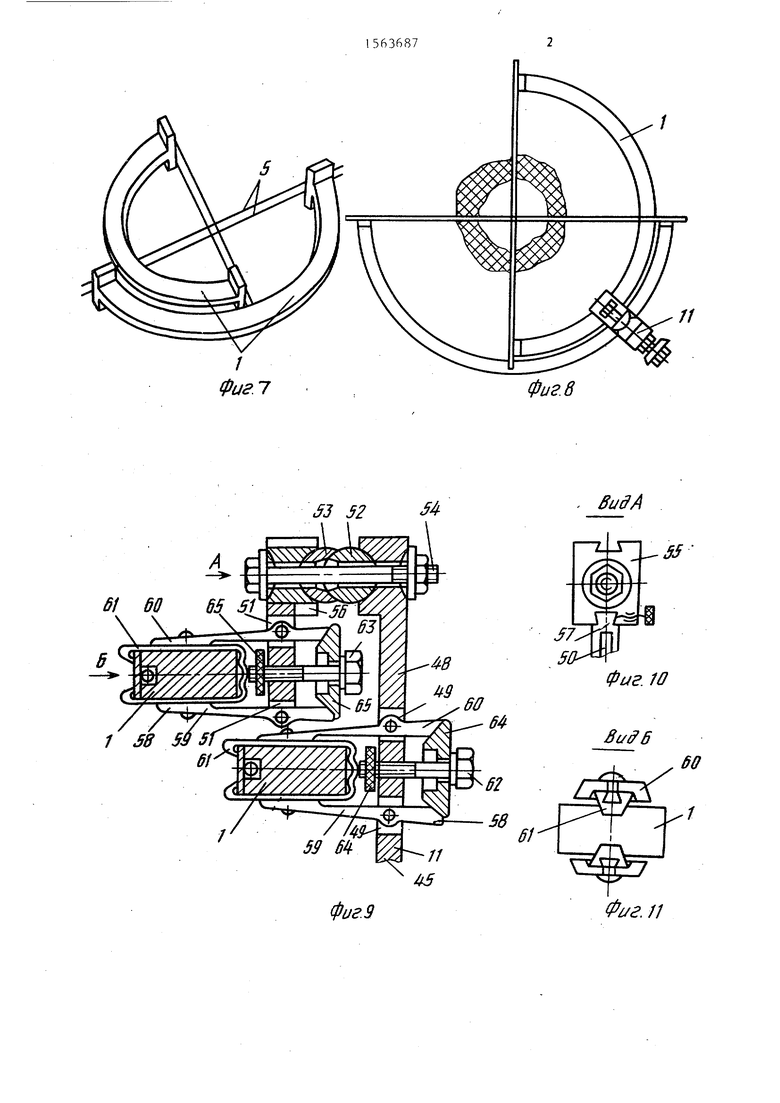
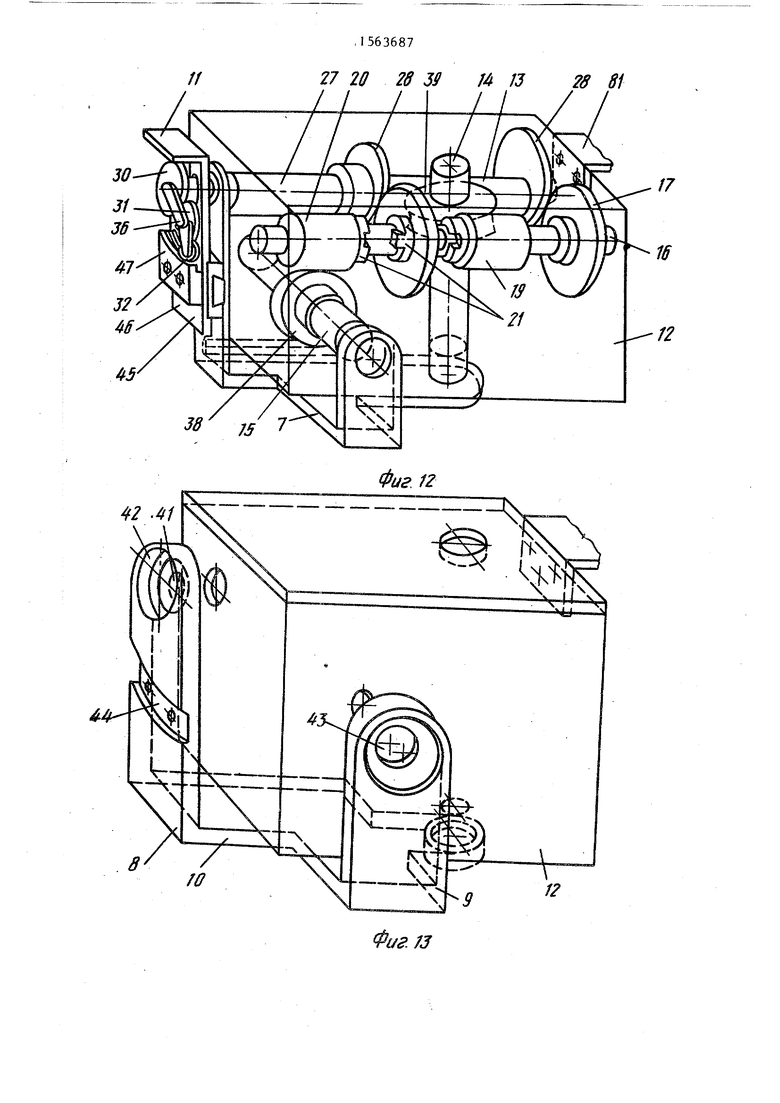
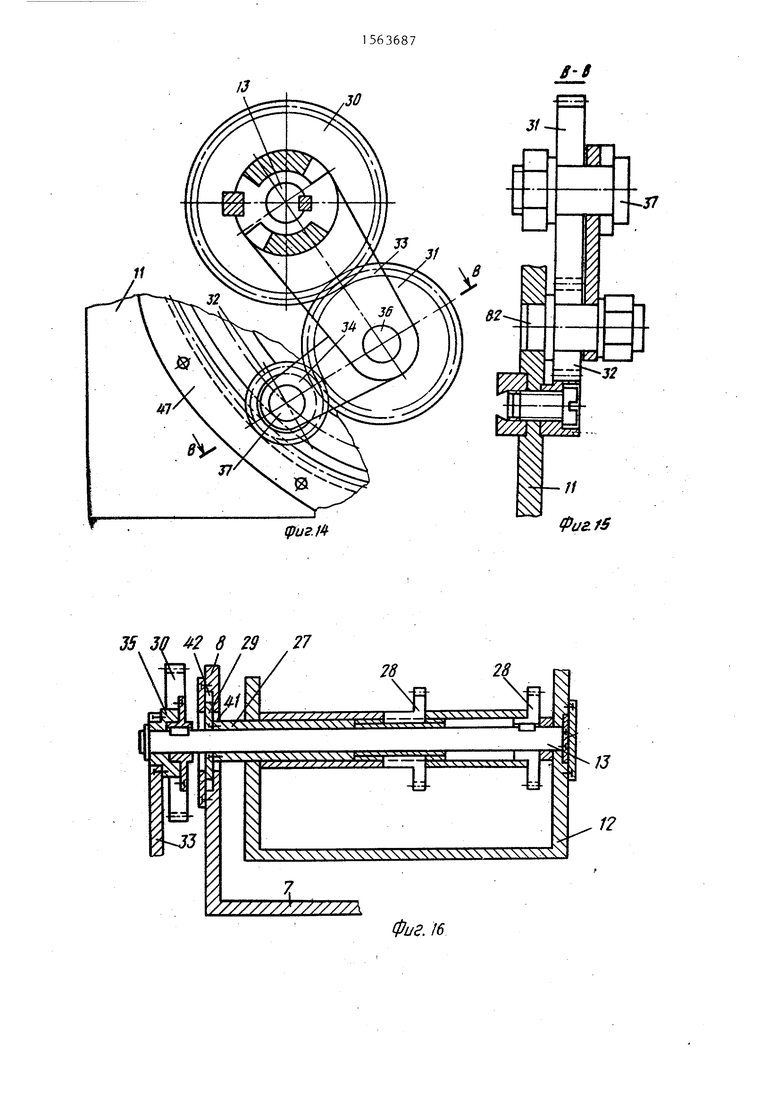
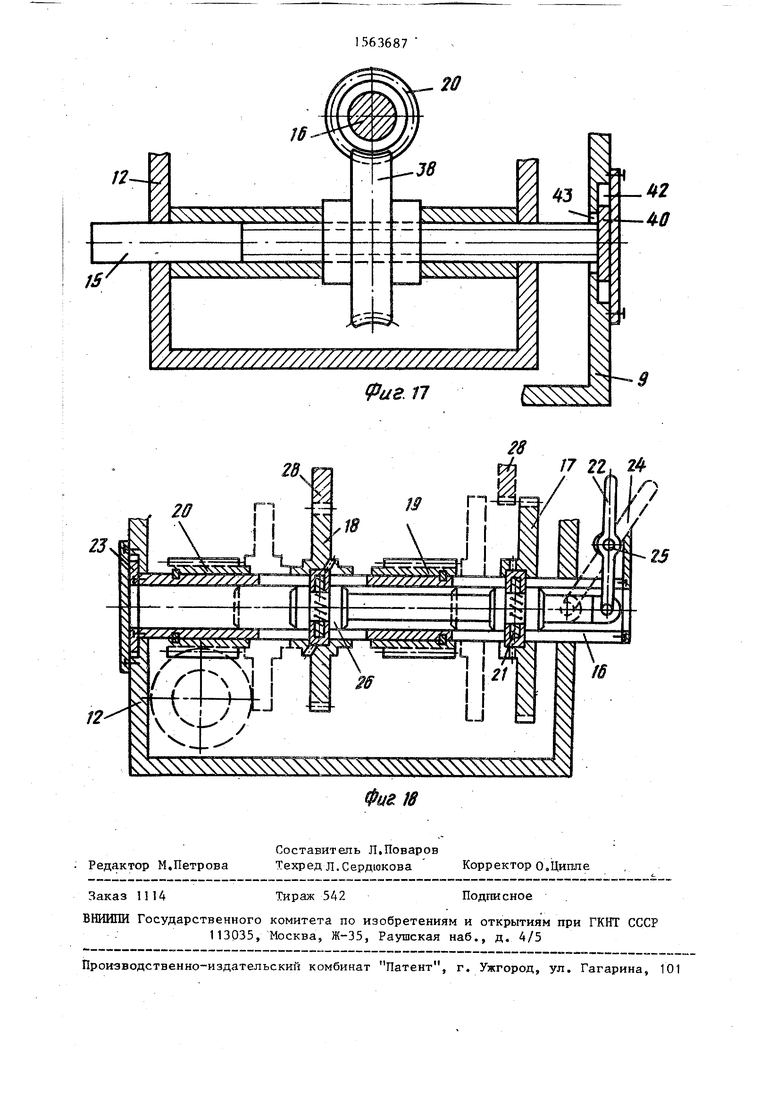
На фиг.1 изображен аппарат для репозиции и фиксации костных отломков, наложенный на конечности; на фиг«2 - скоба со спицами и спицедержателя- ми; на фиг, 3 - ползун спицедержа- теля; на фиг, 4 - винт спицедержа- теля; на фиг, 5 - вильчатый рычаг спицедержателя; на фиг,6 - усеченный конус спицедержателя; на фиг, 7 - взаимное расположение пары скоб аппарата, аксонометрическая проекция; на фиг.8 - связь подвижной пары скоб рычажным механизмом, горизонтальная проекция; на фиг 9 - рычажный механизм, разрез; на фиг. 10 - вид А на фиг,9; на фиг,И - вид Б на фиг,9; на фиг,12 - зубчато-червячный редуктор, связанный с трехпланочным кронштейном; на фиг,13 - взаимное расположение корпуса и трехпланочного кронштейна; на фиг,14 - регулировочные шестерни с держателями, фронтальная проекция; на фиг,15 - разрез В-В на фиг,14 (повернуто);на фиг.16 - ведомый вал редуктора с шестернями, связанный с планкой трехпланочного кронштейна, с регулировочной шестерней и держателем; на фигс 17 - один из двух других ведомых валов редуктора с червячным колесом, связанный с корпусом и планкой трехпланочного кронштейна; на фиг, 18 - польй ведущий вал редуктора с зубчатыми колесами и червяками, а также муфтами и рычагом управления.
Аппарат содержит две пары скоб 1 и 2, узел 3 репозиции, кинематически связанный с парами скоб 1 и 2,выполненными со спицедержателями 4 и спицами 5,
Узел 3 репозиции выполнен в виде зубчато-червячного редуктора 6,трехпланочного кронштейна 7,планки 8 - 10 которого расположены во взаимно перпендикулярных плоскостях. Одна из планок 8 снабжена рычажным механизмом 11, соединенным с подвижной парой скоб 1, а неподвижная пара ско 2 связана с корпусом 12 редуктора 6, оснащенного тремя взаимно перпендикулярно расположенными ведомыми валами .13 - 15 и параллельным одному из ведомых валов 13 полым ведущим .валом 16 с чередующимися зубчатыми колесами 17 и 18 и червяками 19 и 20, а также муфтами 21 и рычагом 22 управления0 На одном конце ведущий вал 16 имеет фланец 23 для соединения с корпусом 12 редуктора 6, а на другом конце - опорную планку 24 с осью 25, перпендикулярной оси ведущего вала 16 для связи с рычагом 22 .управления, В .полости ведущего вала l6 размещен стержень 26, конец которого взаимодействует с рычагом 22 управления. Кроме того, стержень 26 связан посредством муфт 21 с зубчатыми колесами 17 и 18, обеспечивая условия для осевого их перемещения, . На ведомом валу 13, параллельном ведущему валу 16, установлена резьбовая втулка 27 и две шестерни 28,одна из которых выполнена с резьбовым отверстием под резьбовую втулку 27, имеющую возможность продольного перемещения. Конец резьбовой втулки 27, расположенньй за пределами корпуса, выполнен с фланцем 29, закрепленным на одной планке 8 трехпланочного кронштейна 7, Шестерни 28 имеют возможность поочередного соединения с зубчатыми колесами 17 и 18, Один конец ведомого вала 13 закреплен на корпусе 12 редуктора 6, а на другом его конце установлены последовательн связанные между собой регулировочные шестерни 30 - 32 с держателями 33 и 34. Причем шестерня 30 связана со
ступенчатой втулкой 35, установленной на ведомом валу 13, шестерня 31 установлена на промежуточной оси 36, а шестерн 32 - на оси 37. При этом ступенчатая втулка 35 жестко соединена с держателем 33 и имеет подвижное соединение с шестерней 30 и с ве домым валом 13. На ведомых валах 14 и 15, выполненных резьбовыми,уста новлены червячные колеса 38 и 39 с резьбовыми отверстиями под резьбу ва лов 14 и 15, имеющих возможность про дольного перемещения„ Причем одни концы валов 14 и 15 выполнены с флан цами 40, связанными с соответствующими им планками 9 и 10 трехпланочно- го кронштейна 7, а другие свободно размещены в отверстиях корпуса 12. При этом червячные колеса 38 и 39 имеют возможность поочередного взаимодействия с червяками 19 и 20 ведущего вала 16. Все отверстия 41-43 в планках 8 - 10 трехпланочного кронштейна 7 под ведомые валы 14 и 15, фланцы 29 и 40 и резьбовую втулку 27 выполнены ступенчатыми, а диаметры отверстий 41 - 44 - больше соответствующих им диаметров валов 14 и 15, фланцев 29 и 40 и втулки 27. В планке 8 выполнен дугообразный паз 44, центр кривизны которого лежит на продольной оси скоб 1 и 2. В пазу 44 с возможностью перемещения установлен Г-образный кронштейн 45 рычажного механизма 11. Одно плечо 46 этого кронштейна выполнено с зуб- чатым дугообразным сегментом 47,контактирующим с регулировочной шестерней 32, другое плечо 48 выполнено с окнами 49 и снабжено подвеской 50 с окнами 51, причем подвеска 50 связана с плечом 48 сферическим шарниром, выполненным в виде шаровых элементов 52 и 53 и винта 54. Подвеска 50 включает сухарь 55, связанный с ней с помощью паза 56 и выступа 57 по типу ласточкина хвоста и с одним из шаровых элементов 53.
В окнах 49 и 51 шарнирно установлены двуплечие рычажные зажимы 58, выполненные в виде симметрично расположенных рычагов 59 и 60, взаимодействующих с подвижной парой скоб 1 через вставки 61, охватывающие скобы 1 со всех сторон. В плече 48 и подвеске 50 установлены винты 62 и 63, которые через конические шайбы 64 и 65 воздействуют на рычаги 59
636876
и 60. На концах винтов 62 и 63 размещены стопорные гайки 64 и 65.Каждая скоба 1 и 2 выполнена с дугообразным пазом 66, выполненным по ее внутренней стороне, и с основаниями 67 со сквозными клиновидными пазами 68, а также поперечными углублениями 69 под спицы 5. На вершине каждой 10 скобы 1 и 2 выполнено радиально-расположенное клиновидное отверстие 70. Каждый спицедержатель выполнен в виде спаренных ползунов 71 с клиновидными выступами 72 под клиновидные 15 пазы 68. Между встречно расположенными поверхностями ползунов 71 на размещенных перпендикулярно основаниям 67 винтах 73 установлены с помощью крестообразных отверстий 74 20 усеченные пирамиды 75,стенки которых контактируют со стенками ползунов 71. В основаниях. 67 размещены вильчатые рычаги 76 с хвостовиками 77,расположенными по концам дугообразного 25 паза 66, а вилки вильчатых рычагов 76 связаны со свободными концами винтов 73о При этом в клиновидном отверстии 70 установлен болт 78 с клином 79, а в дугообразном пазу 66 разме- 30 щены в ряд шарики 80, контактирующие между собой, крайние из которых контактируют с хвостовиками 77 вильчатых рычагов 76 и с конусными сторонами клина 79.
Аппарат используют следующим образом.
На проксимальном отделе сегмента центрального отломка конечности проводят монтаж попарно и взаимно пере- 4Q крестно спиц 5, преимущественно с расположением в одной плоскости параллельно оси аппарата. Спицы 5 проводят по передней поверхности со стороны разгиба. Затем пропускают спи- 45 Цы 5 на дистальном (периферическом отломке) отделе конечности. Монтаж попарных спиц осуществляют в одной вертикальной плоскости как на проксимальном, так и на дистальном мета- 5о физе. На попарные спицы 5 накладывают скобы 1 и 2 их торцовыми плоскостями и предварительно фиксируют ползунами 71. Последние раздвигаются усеченными пирамидами 75 и окончательно зажимаются болтами 78 с клиньями 79, воздействующими через шарики 80 на вильчатые рычаги 76, пирамиды 75 и ползуны 710 Скобы 1 и 2 аппарата располагаются между собой со сме35
Ь5
щением на концах спиц 5 с образованием части скоб 1 в одном угловом секторе (фиг о 7). В этих секторах осуществляют наложение рычажного механизма 11 на скобы 1 для связи их между собой„ Крепление механизма 11 на скобах 1 выполняется посредством винтов 62 и 63, воздействующих на конические шайбы 64 и 65. Последние воз- действуют на рычаги 59 и 60, плечи которых охватывают скобы 1 (фиг.9). Опорами рычагов 59 и 60 являются плечо 48 и подвеска 50. Вставки 61 на рычагах 59 и 60 обеспечивают ох- ват скоб 1 аппарата со всех сторон (фиг. И). Соединение попарно скоб 1 на дистальном отделе выполнено посредством рычажного механизма 11,имеющего Г-образный кронштейн 45 и эле- . Последний закреплен на корпусе 12, а Г-образный кронштейн 45 - на трехпланочном кронштейне 7 (фиг.12). При отклонениях от параллельного расположения скоб 1 аппара- та на соответствующем отделе отломком кости осуществляют изменение положения одних рычагов 59 и 60 относительно других (фиг.9) посредством сферического шарнира в виде шаровых элементов 52 и 53. Такие изменения выполняют с помощью винта 54, который фиксирует положение сухаря 55,Поворот сухаря 55 на шарнире обеспечивает угловое положение скоб 1 аппара- та. Параллельное смещение рычагов 59 и 60 относительно друг друга в радиальном направлении аппарата выполняется посредством продвижения по пазу 56 сухаря 55 (фиг.10).
Выполнение перемещений вдоль оси аппарата осуществляется следующим образом. Рычагом 22 управления (фиг.18) осуществляют зацепление зубчатой передачи из шестерни 28 с резьбовым отверстием и зубчатого колеса 18. Это выполняется осевой подвижкой стержня 26, расположенного в полости вала 16. При круговом вращении последнего происходит по- ворот шестерни 28 с резьбовым отверстием, которая находится во взаимодействии с резьбовой втулкой 27 посредством резьбового соединения0 Втулка 27 имеет связь с трехпланоч- ным кронштейном 7 (фиг.16), подвижность которого относительно корпуса / 12 редуктора 6 обеспечивает дист- ракционно-компрессионное действие
аппарата. Перемещение костных отломков одного относительно другого в радиальном направлении осуществляется также при круговом вращении вала 16, предварительно обеспечив зацепление червячной пары колеса 38 и червяка 20, Вращение колеса 39 червячной пары обеспечивает перемещение ведомого вала 15 вдоль оси от действия червячной пары. При этом вал 15 взаимодействует с трехпланочным кронштейном 7 посредством фланца 40 (фиг.17).Опорой вала 15 является отверстие в корпусе 12 редуктора 6. Вращение костных отломков вокруг оси аппарата осуществляют поворотом валов 16 и 13 при зацеплении зубчатого колеса 17 и шестерни 28 от действия рычага 22 управления (фиг.18)о При этом вращение вала 13 совместно с шестерней 30 и шестерен 31 и 32 с дугообразным сегментом 47 вызывает поворот Г-образ- ного кронштейна 45 (фиг.12), Последний взаимодействует с трехпленочным кронштейном 7 посредством дугообразного паза 44, стенки которого выполнены конусными. Кроме того, шип 82 (фиг«15) взаимодействует с дугообразным пазом 44 на кронштейне 7,обеспечивая постоянное зацепление шестерен 30 - 32, размещенных на держателях 33 и 34, которые имеют возможность поворота на оси 37.Перемещение трехпланочного кронштейна 7 относительно вала 13 осуществляется посредством подвижной связи фланца 29,установленного в ступенчатом отверстии трехпланочного кронштейна 7 (фиг.16).
Формула изобретения
1. Аппарат для репозиции и фиксации костных отломков, содержащий две пары скоб, узел репозиции,кинематически связанный с парами скоб, выполненными со спицедержателями и спицами, Отличающийся тем, что, с целью сокращения времени проведения операции, узел репозиции выполнен в виде зубчато-червячного редуктора и трехпланочного кронштейна, планки которого расположены во взаимно перпендикулярных плоскостях, одна из этих планок снабжена рычажным механизмом, соединенным с подвижной парой скоб, а неподвижная пара скоб связана с корпусом редуктора.
2,, Аппарат по п.1, о т л и ч а
щ и и с я тем, что зубчато-рычажный редуктор выполнен в виде трех взаимно перпендикулярно расположенных ведомых валов и параллельного одному из ведомых валов полого ведущего .вала с чередующимися зубчатыми колесами и червяками, а также муфтами и рычагом управления, на ведомом валу, JQ параллельном ведущему, установлена резьбовая втулка и две наест ер ни, одна из которых выполнена с резьбовым отверстием под резьбовую втулку,имеющую возможность продольного переме- щения, ее конец, расположенный за пределами корпуса, выполнен с фланцем, закрепленным на одной планке трехпланочного кронштейна, причем шестерни имеют возможность поочеред- 20 ного соединения с зубчатыми колесами, один конец этого ведомого вала закреплен на корпусе редуктора, а на другом его конце установлены последовательно связанные между собой25 регулировочные шестерни с держателями, на двух других ведомых валах, виполненных резьбовыми, установлены червячные колеса с резьбовыми отверстиями под резьбу валов, имеющих воз- зо можность продольного перемещения, причем одни концы этих валов выполнены с фланцами, связанными с соответствующими им планками трехпленоч- ного кронштейна, а другие концы этих валов свободно размещены в отверстиях корпуса, при этом червячные колеса имеют возможность поочередного взаимодействия с червяками ведущего вала.
3. Аппарат поп.1,отличаю- щ и и с я тем, что трехпланочный кронштейн выполнен со ступенчатыми отверстиями в каждой планке под ведомые валы, фланцы и резьбовую втулку д редуктора, а диаметры этих отверстий больше соответствующих им диаметров валов, фланцев и втодки, в одной из планок выполнен дугообразный паз, центр кривизны которого лежит на50
продольной оси скоб.
35
40
63687 10
JQ2025зо
д50
35
40
4.Аппарат по п.1, о т л и ч а ю- щ и и с я тем, что рычажный механизм выполнен в виде Г-образного кронштейна, установленного в дугообразном пазу, одно плечо этого кронштейна выполнено с зубчатым дугообразным сегментом,контактирующим со свободной регулировочной шестерней редук- тора, другое его плечо выполнено
с окнами и снабжено подвеской с окнами, причем подвеска связана с плечом кронштейна сферическим шарниром, двуплечих рычажных зажимов, шарнирно установленных в окнах плеча и подвески, причем в зажимах закреплена подвижная пара скоб.
5.Аппарат по п.1, отличающийся тем, что каждая скоба выполнена с дугообразным пазом,выполненным по ее внутренней стороне, и
с основаниями со сквозными клиновидными пазами, а также с поперечными углублениями под спицы, на вершине скобы выполнено радиально расположенное клиновидное отверстие.
6 „ Аппарат по п.1, отличающийся тем, что каждый спицедер- жатель выполнен в виде спаренных ползунов с клиновидными выступами под клиновидные пазы скоб,винтов,установленных между встречно расположенными поверхностями ползунов и размещенных на основаниях скоб,усеченных пирамид, установленных на винтах, причем стенки пирамид контактируют со стенками ползунов, вильчатых рычагов с хвостовиками, расположенных на концах дугообразного паза скобы, а вилки вильчатых рычагов связаны со свободными концами винтов, болта с клином, установленным в клиновидном отверстии скобы, шариков,контактирующих между собой, расположенных в ряд и размещенных в дугообразном пазу скобы, причем крайние шарики контактируют с хвостовиками вильчатых рычагов и конусными сторонами клина„
5 69 68
Фие.г
7S
78


| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для репозиции и фиксации костных отломков | 1988 |
|
SU1581301A1 |
| Аппарат для восстановления подвижности лучелоктевых суставов | 1983 |
|
SU1147380A1 |
| Устройство для репозиции переломов костей нижних конечностей | 1982 |
|
SU1074513A1 |
| СИСТЕМА УПРАВЛЕНИЯ ЧРЕСКОСТНЫМ АППАРАТОМ | 2006 |
|
RU2327430C1 |
| КОМПРЕССИОННО-ДИСТРАКЦИОННЫЙ АППАРАТ | 1998 |
|
RU2152189C1 |
| Компрессионно-дистракционный аппарат | 1983 |
|
SU1174018A1 |
| КОМПРЕССИОННО-ДИСТРАКЦИОННЫЙ АППАРАТ | 1993 |
|
RU2064783C1 |
| Устройство для репозиции переломов трубчатых костей | 1984 |
|
SU1195993A1 |
| Устройство для лечения переломов костей | 1982 |
|
SU1076108A1 |
| КОМПРЕССИОННО-ДИСТРАКЦИОННЫЙ АППАРАТ | 1993 |
|
RU2068241C1 |
Изобретение относится к медицинской технике. Аппарат для репозиции и фиксации костных отломков предзначен для сокращения времени проведения операции. Аппарат содержит две пары скоб 1 и 2, узел репозиции 3, кинематически связанный с парами скоб 1 и 2, выполненных со спицедержателями 4 и спицами 5. Узел репозиции выполнен в виде зубчато-червячного редуктора 6, трехпланочного кронштейна 7, планки 8-10 которого расположены во взаимно перпендикулярных плоскостях. Планка 8 снабжена рычажным механизмом 11, соединенным с подвижной парой скоб 1, а неподвижная пара скоб 2 связана с корпусом 12 редуктора 6. Репозиционные возможности в аппарате достигаются благодаря возможности перемещения в трех плоскостях трехпланочного кронштейна 7 и повороту относительно последнего рычажного механизма 11, причем кронштейн 7 и механизм 11 приводятся в движение редуктором 6. 18 ил.
Фиг &
Фиг В
53 52
61 дО 65 51
Фие.9
Фиг 8
. Вид А
55
Фиг, 11
27 20 28 39 I I I
30
45
Я 75 7
44
/4 /J 28 81
Фиг 12
12
Фиг 13
&глф
ll
LZ 6z 9 г h Vr
if I an if)
/189e9Si
28,
Редактор М.Петрова
Составитель Л.Поваров Техред Л. Сердюкова
Заказ 1114
Тираж 542
ВНИИПИ Государственного комитета по изобретениям и открытиям при ГКНТ СССР 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-издательский комбинат Патент, г. Ужгород, ул. Гагарина, 101
Фиг 18
Корректор ОоЦипле
Подписное
| Аппарат для репозиции и фиксации костных отломков | 1974 |
|
SU517196A1 |
| кл | |||
| Устройство для сортировки каменного угля | 1921 |
|
SU61A1 |
