15
20
Изобретение относится к машинотроению, а именно к промышленным роботам для захвата и ориентации деалей относительно технологического оборудования, а также для переноса этих деталей в различные точки пространства, и может быть использовано для автоматизации процессов изготовления изделий из термореактивных пластмасс путем их прессования $ гидравлических прессах.
Цель изобретения - расширение тех- 25 нологических возможностей за счет обеспечения выполнения различных вспомогательных технологических операций и повышение их быстродействия и автоматизация процесса изготовления слож- 30 ных армированных изделий из термореактивных пластмасс.
На фиг.1 изображен промышленный робот в комплексе с гидравлическим прессом; на фиг.2 - то же, вид сверху; на фиГоЗ сечение А-А на фиг.2.
Промышленный робот состоит из основания 1, колонны 2, жестко закрепленной на основании. На колонне 2 смонтирован корпус 3, закрепленный основанием 4 на колонне 2, в котором установлен подъемный стол 5 с пово-. ротной платформой 6. Подъемный стол 5 установлен на направляющих колонках 7 с пружинами 8. На основании 4 корпуса 3 установлен привод подъемного стола 5 в виде силового цилиндра Э, шток 10 которого связан через шарнир 11 с подъемным столом 5. На подъемном столе 5 смонтирован привод поворота поворотной платформы 6, состоящий из двигателя, например шагового двигателя 12 с датчиком перемещения 13 (фиг.1) и цилиндрической зубчатой . передачи, ведущее колесо 14 которой установлено на выходном валу шагового двигателя 12, а ведомое колесо 15 жестко закреплено на верхней поверхности поворотной платформы 6. Пово40
45
50
55
5
0
5 0
0
45
50
55
ротная платформа 6 выполнена в виде неполного кольцевого основания с пазами 16 на боковых поверхностях и смонтирована на направляющих роликах 17, взаимодействующих с пазами 16. Направляющие ролики 17 установлены на ося 18, жестко закрепленных на подъемном столе 5 корпуса 3 (фиг.З). В нижней поверхности поворотной платформы 6 выполнен паз 19, в котором размещены направляющие; в которых закреплены корпуса механических рук 20 и 21 с захватами и силовыми цилиндрами их приводов (показаны условно) для установки арматуры. В пазу 19 закреплены также корпуса технологических устройств: устройства обдува и смазки 22, формирующей полости пресс-формы 23, устройства загрузки материала 2k, устройства установки и съема 25 диска 26, устройства съема запрессовок 27, панели подключения системы управления роботом 28, кабели 29 и шланги 30 их приводов. Пресс-форма 23 установлена на рабочем месте гидропресса 31, на станине которого закреплены накопитель материала 32, накопитель арматуры 33, тара для готовых изделий 3 (фиг.2)
Промышленный робот работает следующим образом
Перед началом работы производится подготовка технологического оборудования, накопителей арматуры И материала, тары и необходимая регулировка взаимного положения всех элементов комплекса роботгидравлический пресс. После этого включается система управления роботом. Подъемный стол 5 корпуса 3 вместе с поворотной платформой 6 под действием штока 10, соединенного с ним через шарнир 11, силового цилиндра 9 опускается, преодолевая сопротивление пружин 8 по направляющим колонкам 7. Происходит захват
материала и арматуры из накопителей 32 и 33 механическими руками, установ ленными в корпусах механических рук 20 и 21, и устройством за рузки материала 2k. После этого подъемный стол 5 корпуса 3 вместе с поворотной платформой 6 занимает исходное положин 8„ Далее под действием шагового двигателя 12, ведущего зубчатого колеса 1 и ведомого зубчатого колеса 15 происходит поворот поворотной платформы 6 в направляющих роликах 17 на заданную величину, контролируемую датчиком перемещения 13. Во время движения поворотной платформы 6 происходит последовательное введение в рабочую зону гидравлического пресса устройства обдува и смазки 22, производящего подготовку формующей полости пресс-формы 23, устройства 2k для заполнения материалом, устройства установки и съема 25, устанавливающего диск 26, и механических рук 20 и 21, производящих установку арматуры, вставок и знаков. После проведения этих операций поворотная платформа 6 вмест с закрепленными на ней механизмами возвращается в исходное положение, Под действием гидропресса 31 происходит смыкание пресс-формы 23 и процесс прессования. Далее, после выдержки на отверждение, пресс-форма открывается, производится выталкивание отпрессованного изделия, диска 26, форм и формующих элементов, если они предусмотрены конструкцией пресс-формы. После выталкивания поворотная платформа 6 под действием шагового двигателя 12 начинает реверсивное движение и соответственно происходит съем диска 26 устройством установки и съема 25, снятие запрессовки устройством съема запрессовок 27 и съем формующих вкладышей механическими руками 20 и 21, Запрессовки сгружаются в тару для готовых изделий 3. Цикл повторяется.
Формула изобретения 1. Промышленный робот, содержащий
5
}% 5
форму с напряг пяющей, механические руки с захватами, корпусы которых установлены в направляющей поворотной платформы, и приводы перемещений механических рук, захватов и поворотной платформы, отличающийся тем, что, с целью расширения технологических возможностей за счет обеспечения выполнения дополнительных вспомогательных технологических операций и повышения быстродействия, он снабжен технологическими устройствами с корпусами, направляющими колонками, размещенными на колонне основания, и подъемным столом с приводом, причем подъемный стол установлен с возможностью перемещения вдоль направляющих колонок и подпружинен относительно колонны основания, а поворотная платформа выполнена в виде неполного кольцевого основания с пазами на боковых поверхностях под дополнительно введенные направляющие ролики, закрепленные на подъемном столе, при этом технологические устройства размещены на направляющей поворотной платформы, смонтированной на нижней поверхности неполного кольцевого основания, а корпусы технологических устройств и механических рук имеют возможность регулировочного перемещения.
20
25
30
2. Робот лоп.1,отличаю- щ и и с я тем, ч го привод перемещения поворотной платформы выполнен в виде двигателя с датчиком перемещения и зубчатой передачи, ведущее зубчатое колесо которой связано с выходным валом двигателя, установленного на подъемном столе, а ведомое зубчатое колесо закреплено на верхней поверхности п-лн ротнои платформы .
3. Робот по п. 1 , о т л и ч а ю - щ и и с я тем, что привод подъемного стола выполнен в виде силового ци- линдра, размещенного на колонне основания, а его шток шарнирно связан с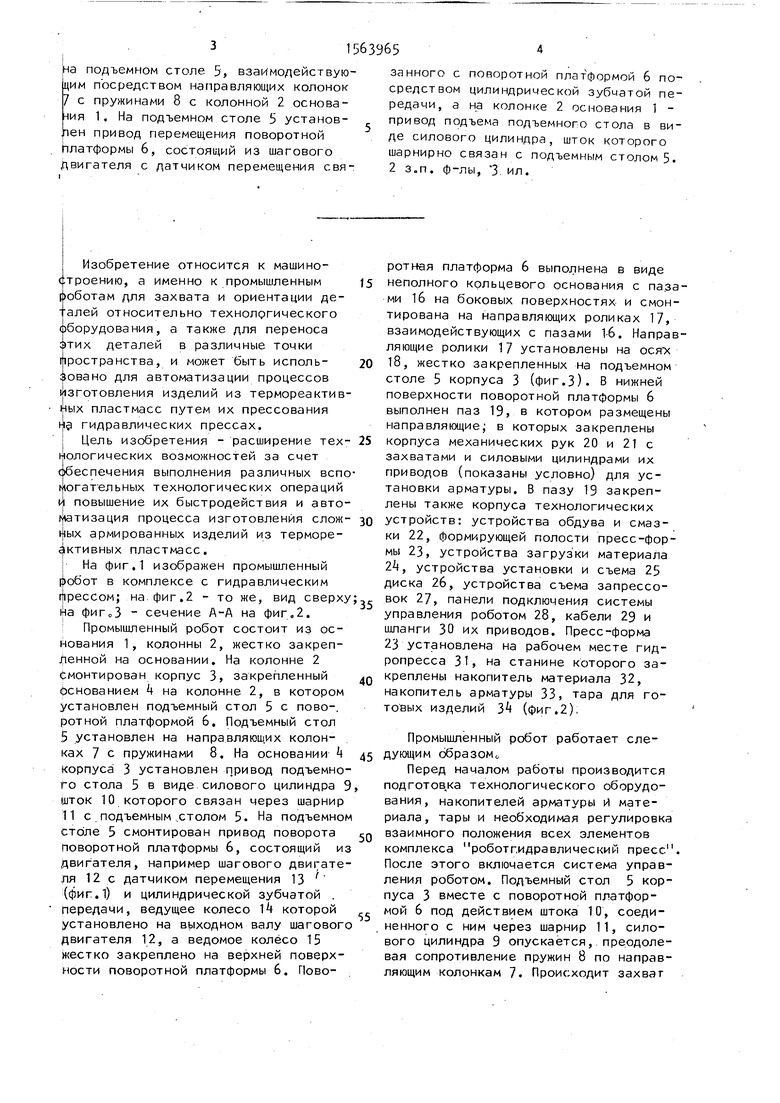

| название | год | авторы | номер документа |
|---|---|---|---|
| Робототехнический комплекс для штамповки деталей из штучных заготовок | 1987 |
|
SU1600895A1 |
| Робототехнический комплекс | 1987 |
|
SU1416244A1 |
| Автоматизированный комплекс для штамповки | 1985 |
|
SU1291253A1 |
| Промышленный робот | 1976 |
|
SU603577A1 |
| АВТОМАТИЗИРОВАННАЯ ТРАНСПОРТНАЯ СИСТЕМА | 2019 |
|
RU2742099C2 |
| РОБОТИЗИРОВАННЫЙ КОМПЛЕКС ДЛЯ МНОГОПЕРЕХОДНОЙ ШТАМПОВКИ | 1993 |
|
RU2082527C1 |
| Установка для упаковки рулонов на поддоне | 1979 |
|
SU861174A1 |
| ГЕРМЕТИЗАЦИОННЫЙ АГРЕГАТ ДЛЯ ОБРАБОТКИ ЭКИПИРОВАННЫХ ФИЛЬТР-ЭЛЕМЕНТАМИ КОРПУСОВ СЕКЦИЙ ФИЛЬТРУЮЩИХ КОРОБОК | 1992 |
|
RU2045357C1 |
| Магазинное устройство к промышленному роботу | 1985 |
|
SU1326374A1 |
| Магазинное устройство | 1984 |
|
SU1255248A1 |
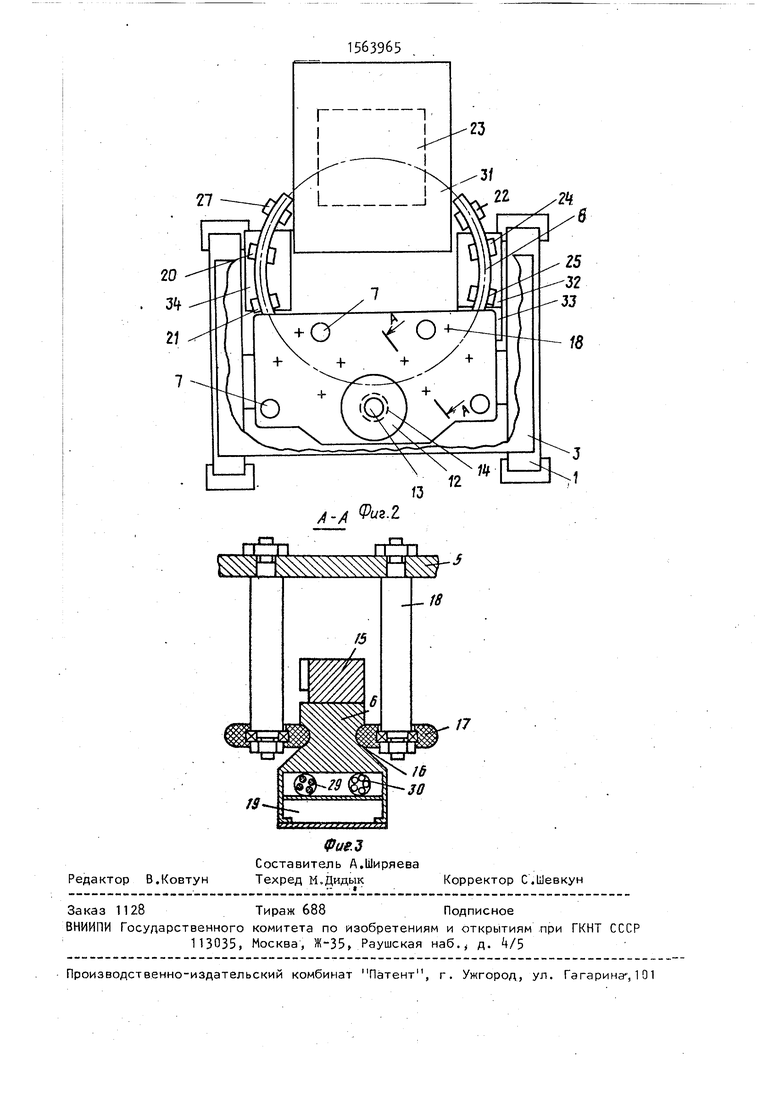
Изобретение относится к машиностроению, а именно к промышленным роботам для захвата и ориентации деталей относительно технологического оборудования, и может быть использовано для автоматизации процессов изготовления изделий из термореактивных пластмасс путем их прессования на гидравлических прессах. Целью изобретения является расширение технологических возможностей за счет обеспечения выполнения различных вспомогательных операций и повышение их быстродействия. Это достигается тем, что установленные в направляющей поворотной платформы 6 механические руки 20 и 21 и технологические устройства с возможностью регулировки их положений за счет поворота поворотной платформы обеспечивают поочередное выполнение как операций загрузки и разгрузки технологического оборудования, так и вспомогательных операций, например обдува и смазки. Поворотная платформа 6 выполнена в виде неполного кольцевого основания, смонтированного с возможностью реверсивного движения на направляющих роликах 17, установленных на осях, жестко закрепленных на подъемном столе 5, взаимодействующим посредством направляющих колонок 7 с пружинами 8 с колонной 2 основания 1. На подъемном столе 5 установлен привод перемещения поворотной платформы 6, состоящий из шагового двигателя с датчиком перемещения, связанного с поворотной платформой 6 посредством цилиндрической зубчатой передачи, а на колонке 2 основания 1 - привод подъема подъемного стола в виде силового цилиндра, шток которого шарнирно связан с подъемным столом 5. 2 з.п.ф-лы, 3 ил.
основание с колонной, поворотную плат- этим столом.
27
А-А
Фиг.2.
| Сепаратор-центрофуга с периодическим выпуском продуктов | 1922 |
|
SU128A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
