1
Изобретение относится к машинострое нию, а именно к промышленным работам для установки и снятия заготовок, деталей, ин-. струмента на станках, кузнечно-прессовых машинах, для транспортирования, ориентации к сборки.
Известен промышленный робот, предназначенный для вьиюлнения технологических операций, содержащий неподвижное основание, поворотный стол, направляющие с карет.,,, кой, на которой установлены колонны, несушие корпус с механической рукой lj.
Этот робот имеет низкую точность позиционирования.
Наиболее близок к предлагаемому роботу jj по техническому решению робот, в котором подвижные в неподвижные элементы механической руки связаны с основанием с помощью колонн и устройств перемещения, выполненных в виде зубчато-реечной переда.20 чи с двумя рейками, соединенными с силоESbiM цилиндром r2j.
Однако низкая точность позиционирова- ния механической руки снижает надежность улзбота в работе.25
Цель изобретения - повышение точности позиционирования п надежности {робота в работе.
Для этого в предлагаемом роботе каждо устройство перемещения снабжено кареткой с опорами,, взаимодействующими с колоннами, причем на одной колонне и ПОДВГЕЖ- ном элементе механической руки закреплены рейки зубчато-реечной передачи, зубчатым колесом которой является одна из опор.
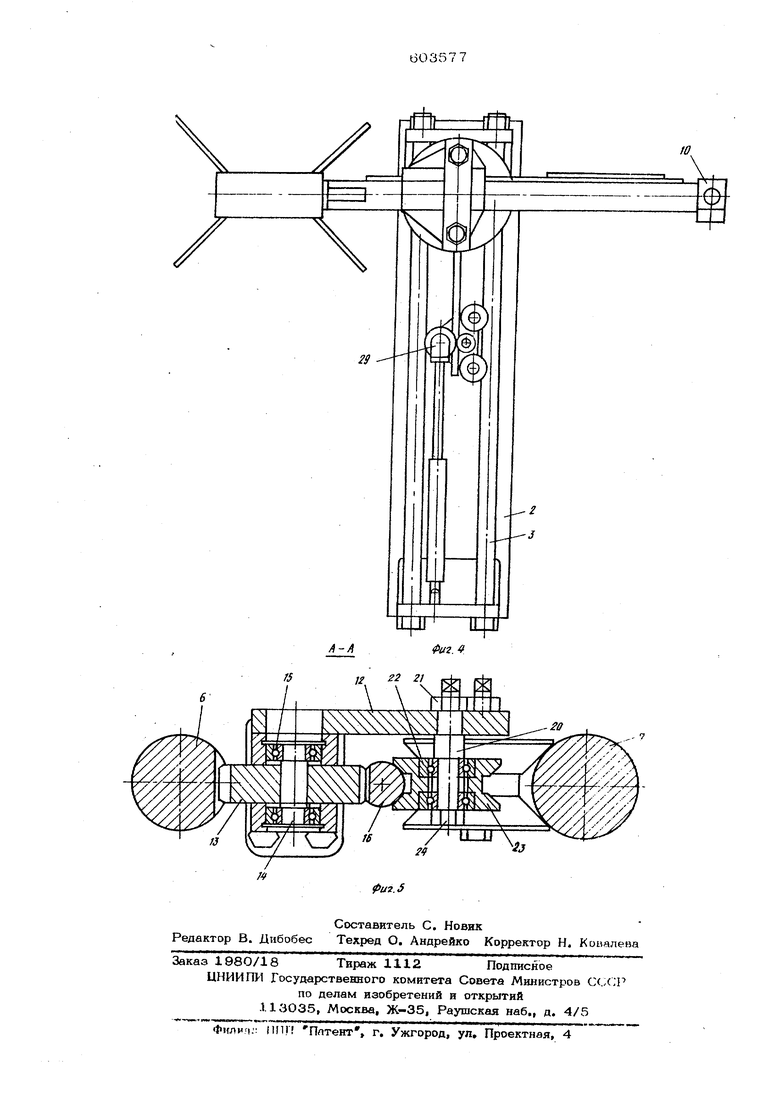
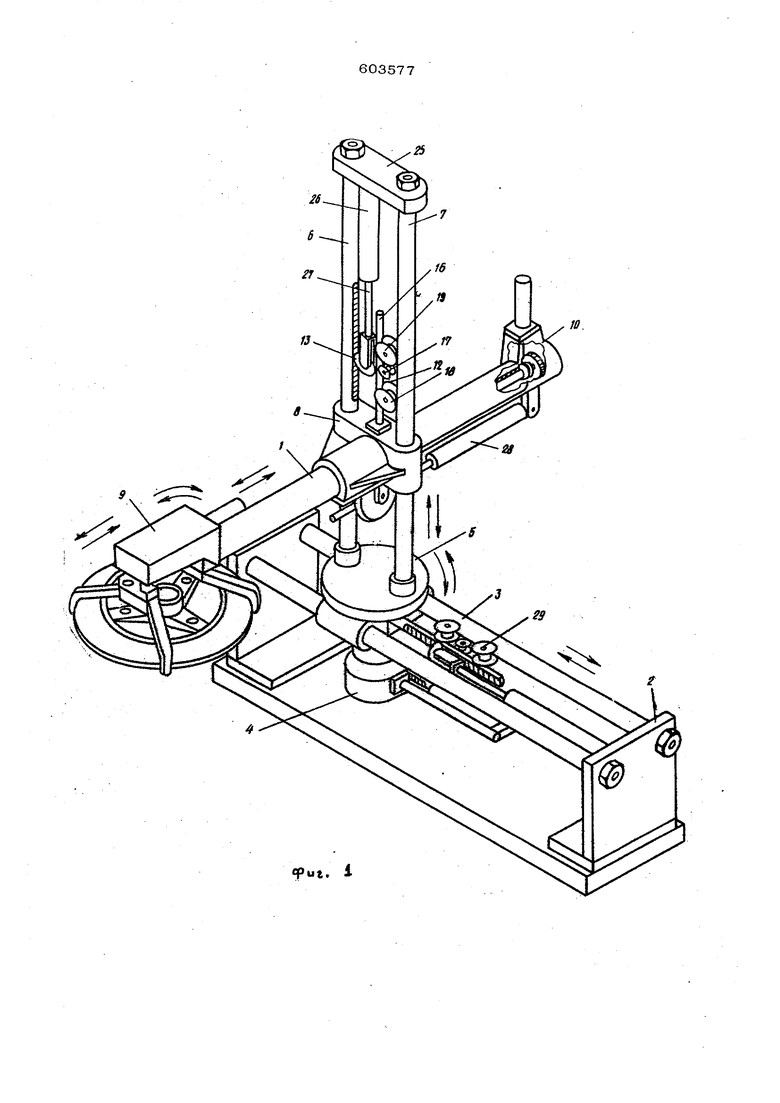
На фиг. 1 изобрансен промышлетгный робот общий; на фиг. 2 - :то же, вид спереди; на фиг. 3 - то же, вид сьок/; на фиг. 4 то же, вид сверху; на фиг. 5 - разрез А-А на фиг. 3.
Промышленный робот содержит Mexaniw ческую руку 1, элементы которой связаны с основанием 2 колоннами, выполнетпгыми в виде цилиндрических направляющих 3. На последних установлен механизм 4 поворота с помощью устройства перемещения, в 51пол- ненного в виде зубчато-реечной передачи с двумя рейками, соединенной с силовым цилиндром. Механизм поворота сккчнгиро- ван на поворотном столе 5, снабженном колоннами 6 и 7 (фиг, З), на которых установлен подвижный корпус 8, несущий механичЕескую руку 1. На механической руке смонтирован спереди ожват 9, а сэадимеханизм 10 его ориентации (фиг. l). Между вертикальными колоннами 6 и 7 (фиг. б) размещено устройство 11 вертикального перемещения руки, состоящее из каретки 12, на которой установлено зубча тое колесо 13, закрепленное на валу 14, установленном в подшипниках 15. Колесо 13 сцеплено с рейкой, )й.гаолненной на ко-. понне 6 и одновременно сцеплено с рейкой 16, шарнирно закрепленной на подвижном корпусе 8.На каретке 12 установлена эксцентриковая роликоопора 17, взаимодей ствующая с рейкой 16, а две других эксиа риковых роликоопоры 18 и 19 размещены на колонне 7, Роликоопора 17 снабжена осью 20, закрепленной на каретке 12 гайкой 21. На оси 20 в подшипниках 22 смо тироваи ролик 23,зафиксированный гайкой 24 Колонны 6 и 7 соединены между собой плитой 25 и образуют (замкнутый контур, обеспечивающий необходимую жесткость. Силовой цилиндр 26 шарнирно соединен с плитой 25, а его щток 27 - с кареткой 12. Робот содержит та1сже нрнвод 2В для перемещения руки 1 в продольном направ лении и устройство 29 для перемещения руки по направляющим 2. Устройство 29 выполнеио аналогично устройству 11. Промышленный робот работает следую™ щим образом. По заданной программным устройством программе рука 1 врашается относительно вертикальной оси поворотным столом 5 с помощью механизма 4. Переме щение руки вдоль оси осуществляется при- вЬдом 28, а прямолинейное перемещение . вперед- назад - устройством 29 горкаон тального перемещения. Схват 9 вращается механизмом 1О. Подъем-опускание руки производится устройством 11 вертикального перемещения. При подаче рабочей жидкости в одну из полостей цилиндра 26, его шток 27 перемещает каретку 12, например, вверх. Зубчатое колесо 13 катится по рейке колонны 6 и перемещает рейку 16 вместе с корпусом 8, рука 1 поднимается. При подаче жидкости в другую полость цилиндра 26 рука аналогичным образом опускается. В процессе износа зубчато-реечного зацепления увеличиваются боковые зазоры и люфт; для установления нормальных зазоров в зацеплении поворачивают эксцентриковую ось роликоопоры 17 или 18 и 19. Формула изобретения Промышленный робот, содержащий механическую руку, подвижные и неподвижные элементы которой связаны с основанием с помощью колонн и устройств перемещения, выполненных в виде зубчато реечиой перед&чи с двумя рейками, соединенными с силовым цилиндром, отличающийся тем, что, с целью поныщения точности по зиционирования и надежности в работе,каждое устройство перемещения снабжено кареткой с опорами, взаимодействующими с колоннами, причем на одной колонне и подвижном элементе механической руки закреплены рейки зубчато-реечной передачи, зубчатым колесом которой является одна из опор. Источники информации, принятые во вн№. мание при экспертизе: 1.Авторское свидетельство № 446412, кл. В 25 3 5/00, 1972. 2.Авторское свидетельство № 503712, кл, В 25 Г 9/00, 1974.
| название | год | авторы | номер документа |
|---|---|---|---|
| Промышленный робот | 1986 |
|
SU1355478A1 |
| Линия для многопереходной штамповки деталей из листового материала | 1987 |
|
SU1433587A1 |
| Автоматизированный комплекс для штамповки | 1985 |
|
SU1291253A1 |
| Промышленный робот | 1980 |
|
SU876415A1 |
| Промышленный робот | 1982 |
|
SU1108005A1 |
| Манипулятор | 1989 |
|
SU1673430A1 |
| Промышленный робот | 1986 |
|
SU1371896A1 |
| Плоскошлифовальный автоматический комплекс для двусторонней обработки деталей | 1988 |
|
SU1657372A1 |
| Промышленный робот | 1986 |
|
SU1313689A1 |
| Устройство для подачи заготовок | 1987 |
|
SU1648729A1 |
Составитель С, Новнк Редактор В. Днбобес Техред О. Андрейко Корректор Н. Ковалева
Заказ 198О/18Тираж 1И2Подписное
ЦНИИ ПИ Государственного комитета Совета Министров С(.х;Р
по делам изобретений и открытий .1.13035, Москва, Ж-35, Раушская наб., д. 4/5
Фнлип.: ПП) Пптент г, Ужгород, уп. Проектная, 4
