положение штоков, при котором кассета сменного магазина полностью загружена готовыми изделиями; на фиг. 10 - поворотный диск, вид сверху; на фиг, 11 - то же, при повороте на угол у. вид сверху; на фиг. 12 - поворотный стол с поворотными дисками, вид сверху; на фиг. 13 - вид Г на фиг. 12; на фиг. 14 - колонна; на фиг. 15 - -разрез Д-Д на фиг. 14; на фиг. 16 - разрез Е-Е на фиг. 14; на фиг. 17 - разрез Ж-Ж на фиг. 12.
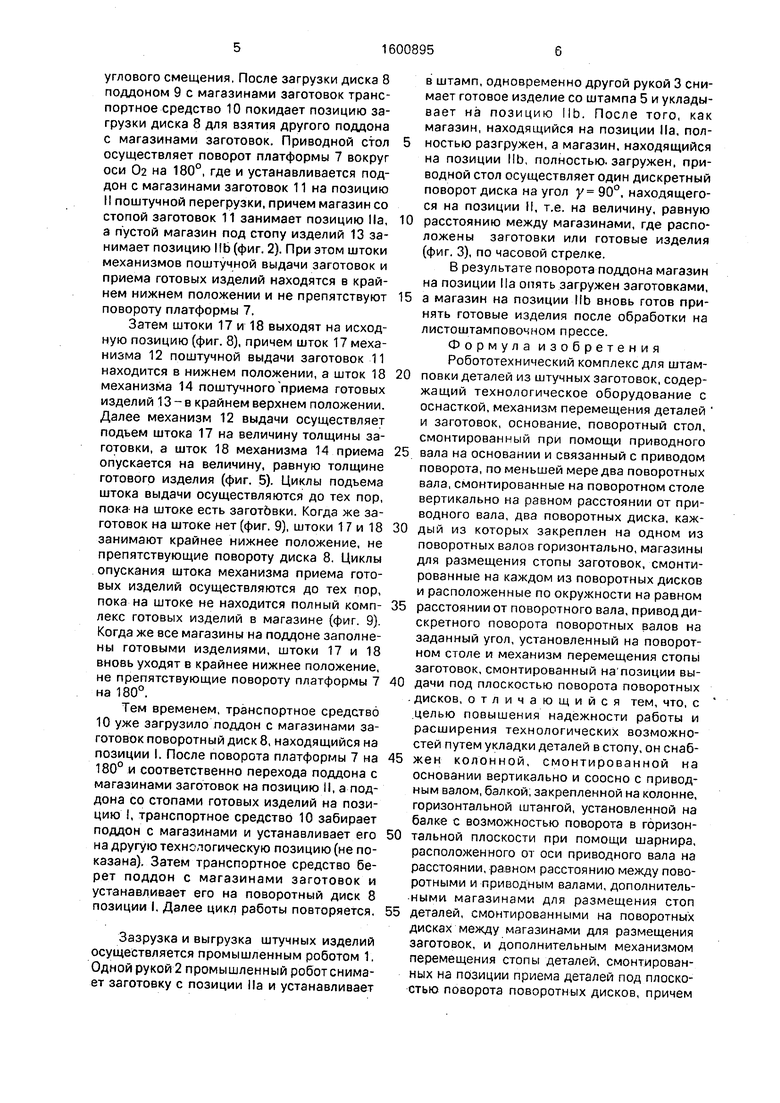
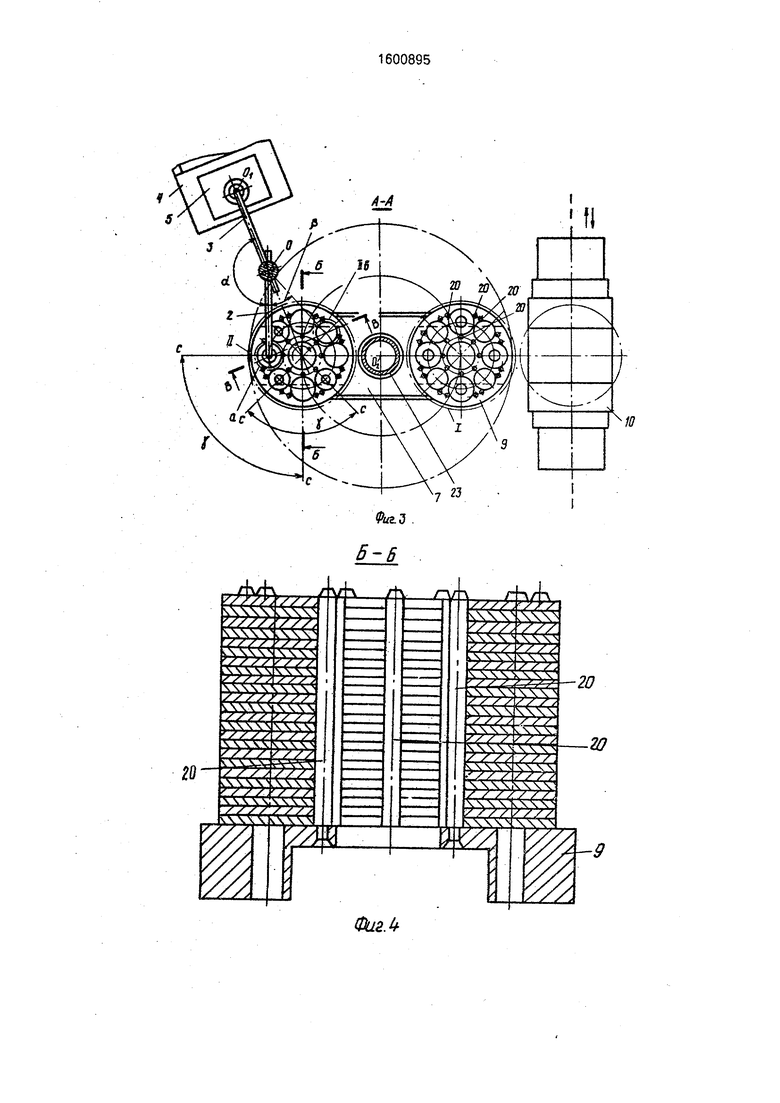
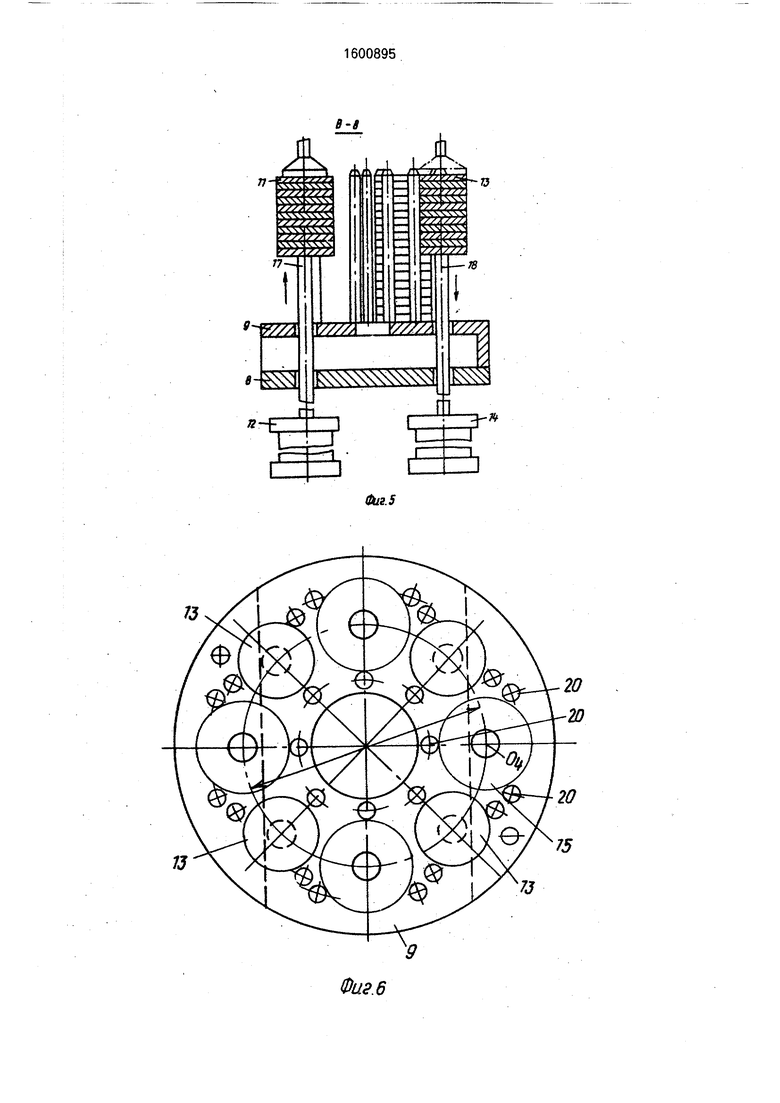
Робототехнический комплекс состоит из промышленного робота 1 с двумя руками 2 и 3 с центром О вращения рук робота, листоштамповочного пресса 4 со штампом 5, которые имеют общую ось Oi давления, приводного стола 6 с поворотной платформой 7 с центром 02 вращения, являющейся поворотным столом. На платформе 7 установлены поворотные диски 8 с возможностью их дискретного поворота вокруг центра Оз. Приводной стол 6 может занимать позицию I перегрузки сьемных поддонов 9, обращенную к перегрузочной позиции транспортного средства 10, и позицию И поштучной перегрузки из поддонов 9. Позиция If поштучной перегрузки имеет позицию Па поштучной выдачи заготовок 11 с механизмом 12 поштучной выдачи заготовок и позицию fib поштучного приема готовых изделий 13 с механизмом 14 поштучного приема. Позиция f обращена в сторону технологического оборудования, т.е. к листоштампоаочному прессу 4. Поддоны 9 снабжены магазинами (кассетами) 15 под заготовки 11 и магазинами (кассетами) 16 под готовые изделия 13. Центры О4 и Os магазинов (кассет) 15 и 16 лежат на одном диаметре. 1 / агазины 15 и 16 поддона § расположены равномерно по окружности и равноудалены от центра вращения поддона 9, который находится на одной оси с поворотным диском 8. Количество магазинов 15 под заготовки 11 и магазинов 16 под готовые изделия на сменном поддоне 9 равное.
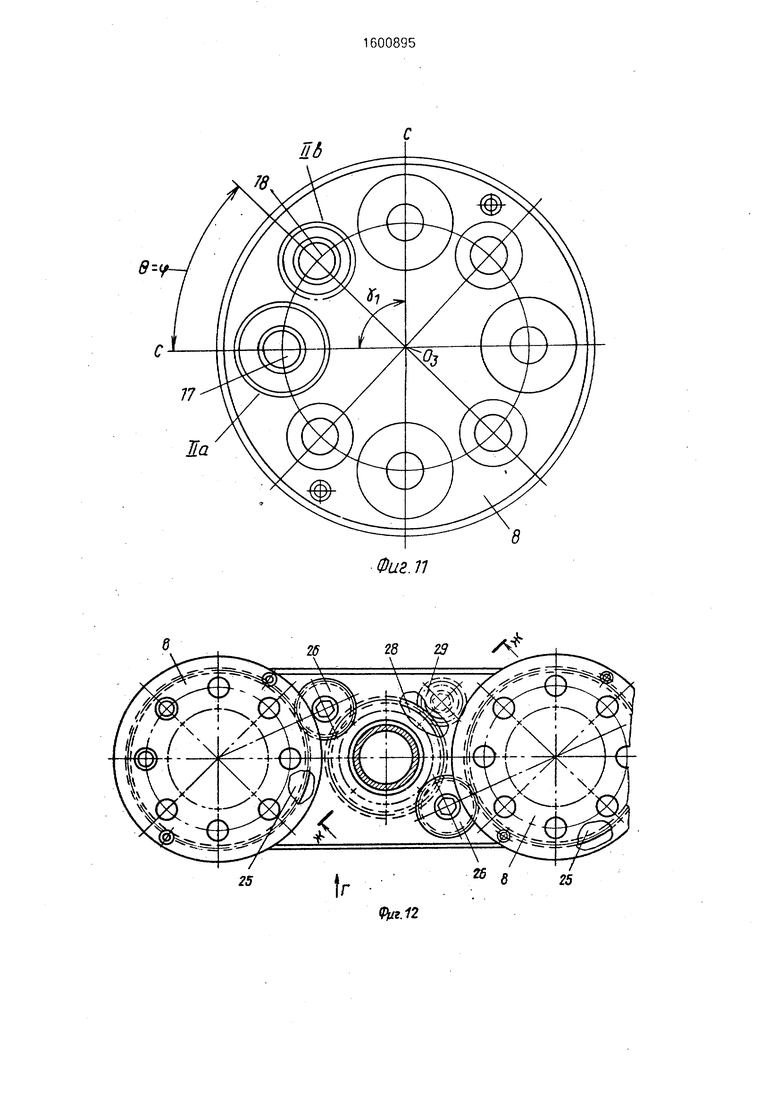
Дискретные повороты определяются углом у, образованным двумя лучами С, выходящими из центра Оз вращения диска к центрам О и Os магазинов для заготовок или готовых изделий.
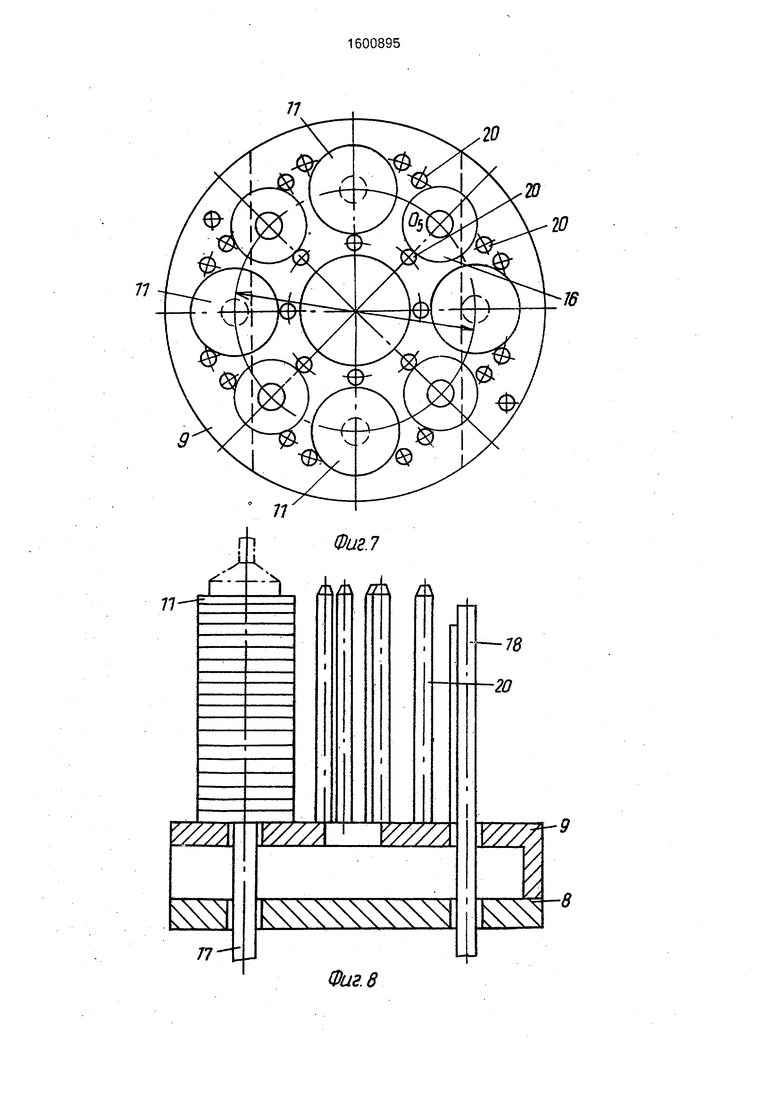
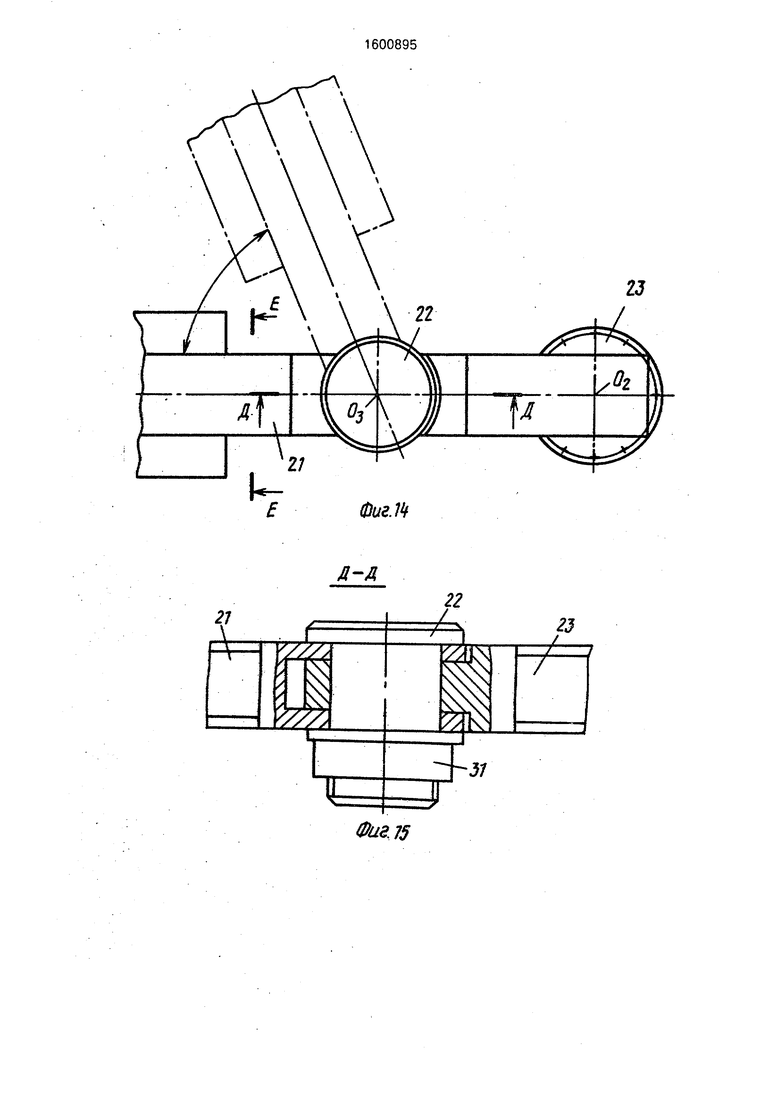
Шток 17 механизма 12 поштучной выдачи заготовок 11 устанавливается соосно с магазином 15 под заготовки 11, а шток 18 механизма 14 поштучного приема - соосно с магазином t6 под готовые изделия 13. Поворотные диски 8 снабжаются элементами 19 фиксации сменных поддонов 9. Магазин сменного поддона 9 образуется тремя вертикальными стержнями 20. Робот 1 подвешивается на штанге 21с шарниром 22 и имеет возможность возвратно-поступательного перемещения по ней и поворота вокруг центра Оз поворотного диска 8. Штанга 21 с шарниром 22 установлена на Г-образной колонне 23, последняя установлена в центре вращения платформы 7 на неподвижной стойке 24 приводного стола 6.
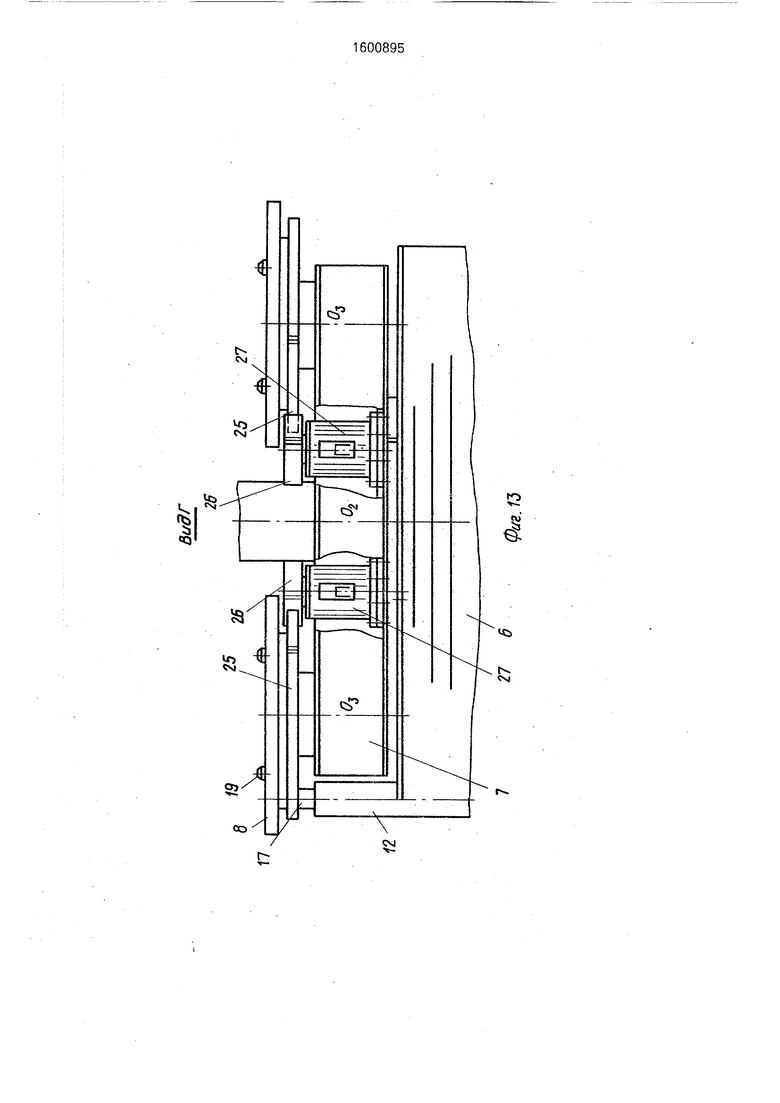
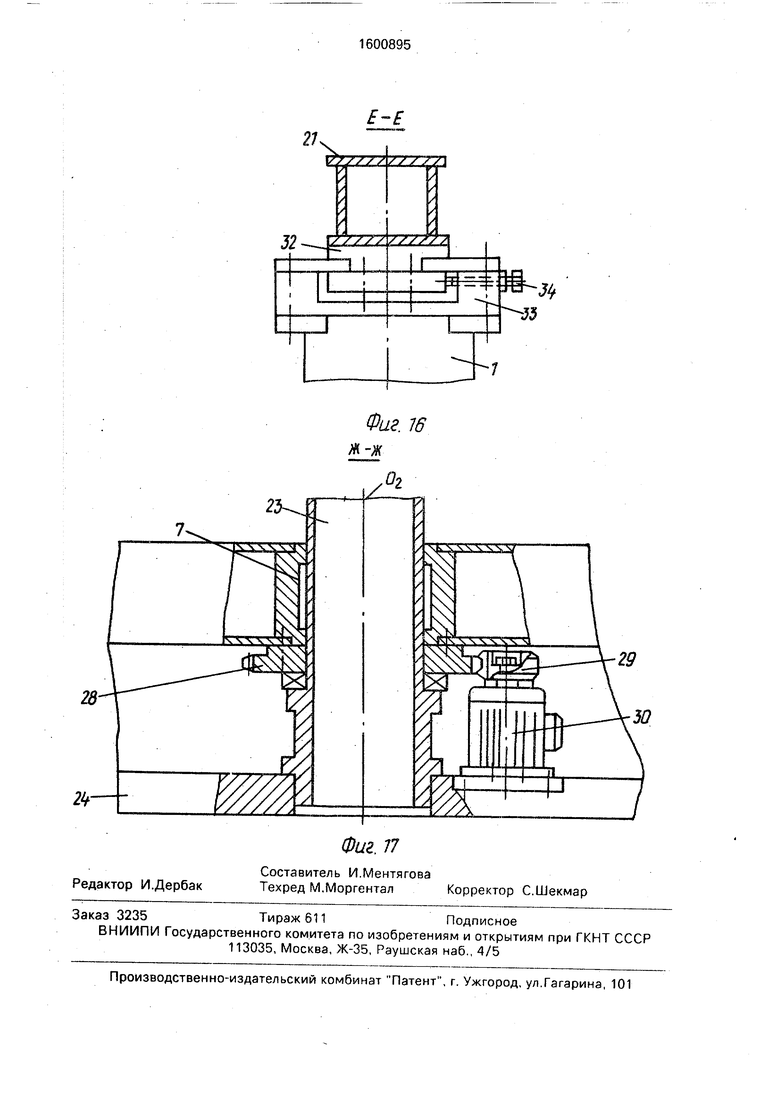
Диски 8 для осуществления дискретных поворотов снабжаются зубчатыми колесами 25, входящими в зацепление с шестернями 26(фиг. 12 и 13). Последние крепятся соосно с валом двигателя 27, статор которого неподвижно крепят к поворотной платформе 7. Для передачи крутящего момента диском 8 зубчатые колеса устанавливаются неподвижно и соосно с дисками 8. Для осуществления поворота платформы 7 на 180° предусмотрена зубчатая пара, состоящая из колеса 28 и шестерни 29. насаженной на вал двигателя 30. Корпус двигателя 30 закреплен на неподвижной стойке 24. Колесо 28 жестко устанааливается на поворотную -платформу 7 соосно оси 02.
Для исключения относительного перемещения штанги 21 с Т-образной колонной в процессе работы робота использована гайка 31, стягивающая шарнирное соединение (фиг. 15). Продольное перемещение робота 1 по штанге 21 (фиг. 16)осуществляется по направляющей 32, закрепленной к штанге 21.
Робот 1 снабжен ползуном 33, который перемещается по направляющей 32. Для фиксации робота 1 относительно штанги 21 предусмотрен стопорный винт 34, взаимодействующий с направляющей 32.
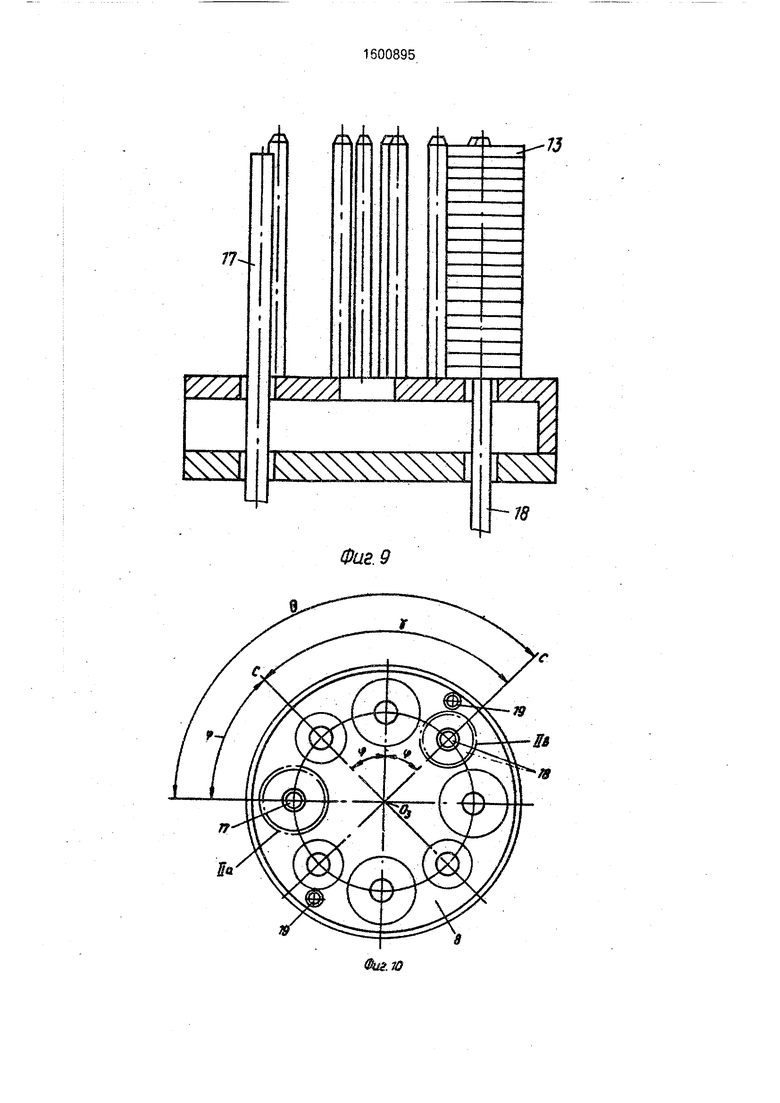
Поворот дисков 8 относительно центра Оз осуществляется каждый раз на угол у, образованный двумя лучами, выходящими из центра Оз к центрам кассет для заготовок или готовых изделий, при этом р (фиг. 10), где f) - угол, образованный двумя лучами, выходящими из центров рядом стоящих кассет под заготовки и готовые изделия к центру Оз. Лучи, выходящие из центра вращения диска к центрам штоков механизма выдачи и приема готовых изделий, образуют угол 0 п 9 , где п - принимает нечетные значения чисел (1, 3,5 и т.д.), причем на фиг. 10 0 3 , а на фиг. 11 в(p ,-r.Q.,
Робототехнический комплекс работает следующим образом.
Транспортным средством 10 поддон 9 с магазинами заготовок 11 устанавливается на поворотный диск 8 приводного стола 6 на позицию I перегрузки поддонов и фиксируется элементами 19 фиксации от осевого и
углового смещения, После загрузки диска 8 поддоном 9 с магазинами заготовок транспортное средство 10 покидает позицию загрузки диска 8 для взятия другого поддона с магазинами заготовок. Приводной стол осуществляет поворот платформы 7 вокруг оси 02 на 180°, где и устанавливается поддон с магазинами заготовок 11 на позицию II поштучной перегрузки, причем магазин со стопой заготовок 11 занимает позицию На, а пустой магазин под стопу изделий 13 занимает позицию lib (фиг. 2). При атом штоки механизмов поштучной выдачи заготовок и приема готовых изделий находятся в крайнем нижнем положении и не препятствуют повороту платформы 7.
Затем штоки 17 и 18 выходят на исходную позицию (фиг. 8), причем шток 17 механизма 12 поштучной выдачи заготовок 11 находится в нижнем положении, а шток 18 механизма 14 поштучного приема готовых изделий 13 - в крайнем верхнем положении. Далее механизм 12 выдачи осуществляет подъем штока 17 на величину толщины заготовки, а шток 18 механизма 14 приема опускается на величину, равную толщине готового изделия (фиг. 5). Циклы подъема штока выдачи осуществляются до тех пор, пока на штоке есть заготЬвки. Когда же заготовок на штоке нет (фиг. 9), штоки 17 и 18 занимают крайнее нижнее положение, не препятствующие повороту диска 8. Циклы опускания штока механизма приема готовых изделий осуществляются до тех пор, пока на штоке не находится полный комплекс готовых изделий в магазине (фиг. 9). Когда же все магазины на поддоне заполнены готовыми изделиями, штоки 17 и 18 вновь уходят в крайнее нижнее положение, не препятствующие повороту платформы 7 на 180°.
Тем временем, транспортное средство 10 уже загрузило поддон с магазинами заготовок поворотный диск 8, находящийся на позиции I. После поворота платформы 7 на 180 и соответственно перехода поддона с магазинами заготовок на позицию II, а поддона со стопами готовых изделий на позицию I, транспортное средство 10 забирает поддон с магазинами и устанавливает его на другую технологическую позицию (не показана). Затем транспортное средство берет поддон с магазинами заготовок и устанавливает его на поворотный диск 8 позиции I. Далее цикл работы повторяется.
Зазрузка и выгрузка штучных изделий осуществляется промышленным роботом 1. Одной рукой 2 промышленный робот снимает заготовку с позиции Па и устанавливает
в штамп, одновременно другой рукой 3 снимает готовое изделие со штампа 5 и укладывает на позицию Mb. После того, как магазин, находящийся на позиции Па, пол- 5 ностью разгружен, а магазин, находящийся на позиции lib, полностью, загружен, приводной стол осуществляет один дискретный поворот диска на угол у 90°. находящегося на позиции П. т.е. на величину, равную 10 расстоянию между магазинами, где расположены заготовки или готовые изделия (фиг. 3). по часовой стрелке.
В результате поворота поддона магазин на позиции Па опять загружен заготовками, 15 а магазин на позиции lib вновь готов принять готовые изделия после обработки на листоштамповочном прессе.
Формула изобретения Робототехнический комплекс для штам- 20 повки деталей из штучных заготовок, содержащий технологическое оборудование с оснасткой, механизм перемещения деталей и заготовок, основание, поворотный стол, смонтированный при помощи приводного 25 вала на основании и связанный с приводом поворота, по меньшей мере два поворотных вала, смонтированные на поворотном столе вертикально на равном расстоянии от приводного вала, два поворотных диска, каж- 30 дый из которых закреплен на одном из поворотных валов горизонтально, магазины для размещения стопы заготовок, смонтированные на каждом из поворотных дисков и расположенные по окружности на равном 35 расстоянии от поворотного вала, привод дискретного поворота поворотных валов на заданный угол, установленный на поворотном столе и механизм перемещения стопы заготовок, смонтированный на позиции вы- 40 дачи под плоскостью поворота поворотных . дисков, отличающийся тем. что. с .целью повышения надежности работы и расширения технологических возможностей путем укладки деталей в стопу, он снаб- 5 жен колонной, смонтированной на основании вертикально и соосно с приводным валом, балкой; закрепленной на колонне, горизонтальной штангой, установленной на балке с возможностью поворота в горизон- 0 тальной плоскости при помощи шарнира, расположенного от оси приводного вала на расстоянии, равном расстоянию между поворотными и приводным валами, дополнитель- ными магазинами для размещения стоп 5 деталей, смонтированными на поворотных дисках между магазинами ,цля размещения заготовок, и дополнительным механизмом перемещения стопы деталей, смонтированных на позиции приема деталей под плоскостью поворота поворотных дисков, причем
механизм перемещения деталей и загото- имеющего две руки с обхватами, располо- вок выполнен в виде промышленного робо- женные горизонтально под углом одна отно- та, подвижно установленного на штанге и сительно другой.
22
If21 Д,
| название | год | авторы | номер документа |
|---|---|---|---|
| Робототехнический комплекс | 1986 |
|
SU1349972A1 |
| Роботизированный технологический комплекс | 1986 |
|
SU1532148A1 |
| Загрузочное устройство к роботизированному комплексу | 1986 |
|
SU1470401A1 |
| Многопозиционное загрузочное устройство | 1984 |
|
SU1333533A1 |
| Магазинное устройство | 1985 |
|
SU1326376A1 |
| Робототехнический комплекс | 1987 |
|
SU1416244A1 |
| Автоматическая линия | 1982 |
|
SU1043036A1 |
| КОНТРОЛЬНО-СОРТИРОВОЧНЫЙ КОМПЛЕКС | 1990 |
|
RU2023571C1 |
| Автоматизированный комплекс для листовой штамповки | 1979 |
|
SU774722A1 |
| Устройство для поштучной подачи листовых заготовок в рабочую зону пресса | 1990 |
|
SU1727946A1 |
Изобретение относится к обработке металлов давлением и может быть использовано для штамповки деталей из штучных заготовок. Цель изобретения - повышение надежности в работе и расширение технологических возможностей путем укладки деталей в стопу. Робототехнический комплекс содержит технологическое оборудование с оснасткой, механизм перемещения деталей и заготовок, основание, поворотный стол, смонтированный при помощи приводного вала на основании и связанный с приводом поворота, по меньшей мере два поворотных вала, смонтированных на поворотном столе вертикально на равном расстоянии от приводного вала два поворотных диска, каждый из которых закреплен на одном из поворотных валов горизонтально. На поворотных дисках установлены по окружности магазины для размещения стоп заготовок. На поворотном столе расположен привод дискретного поворота поворотных дисков на заданный угол. На позиции выдачи установлен механизм перемещения стопы заготовок. На поворотных дисках смонтированы магазины для размещения стоп деталей, расположенные между магазинами для размещения стоп заготовок. На основании вертикально и соосно приводному валу смонтирована колонка, несущая горизонтально закрепленную балку. На балке с возможностью поворота в горизонтальной плоскости установлена штанга при помощи шарнира. На штанге подвижно размещен промышленный робот, оснащенный двумя руками со схватами. 17 ил.
5 2 фа8.1
22
10
Фиг.3
5-В
ФигЛ
/J
7J
Фиг. 6
7J
;i
Фиг.7
IL /;}
v///.
Фиг. 8
20
-7B -20
V//7r
1
b
B
У/ТА
122222
Фиг. 9
2i
у Ч
JT
У///Л
У/ТА.
nf)
6
26
25
Фиг. 77
28 23/X
.Ф
25
oj
CD
д-д
I
//7/
щ
13
гг
QZ
д
4J
Фиг.Щ
22
25
г
-J7
Фаг, 15
J2
7
М-Ж
5-J
/////j
QI
29
| Магазинное устройство | 1985 |
|
SU1326376A1 |
