Изобретение относится к автоматике и вычислительной технике и может быть использовано в станках с число- вым программным управлением,
Целью изобретения является расширение области применения устройства за счет исключения ошибки на контуре обрабатываемой детали, вызванной за- паздыванием выборки люфта.
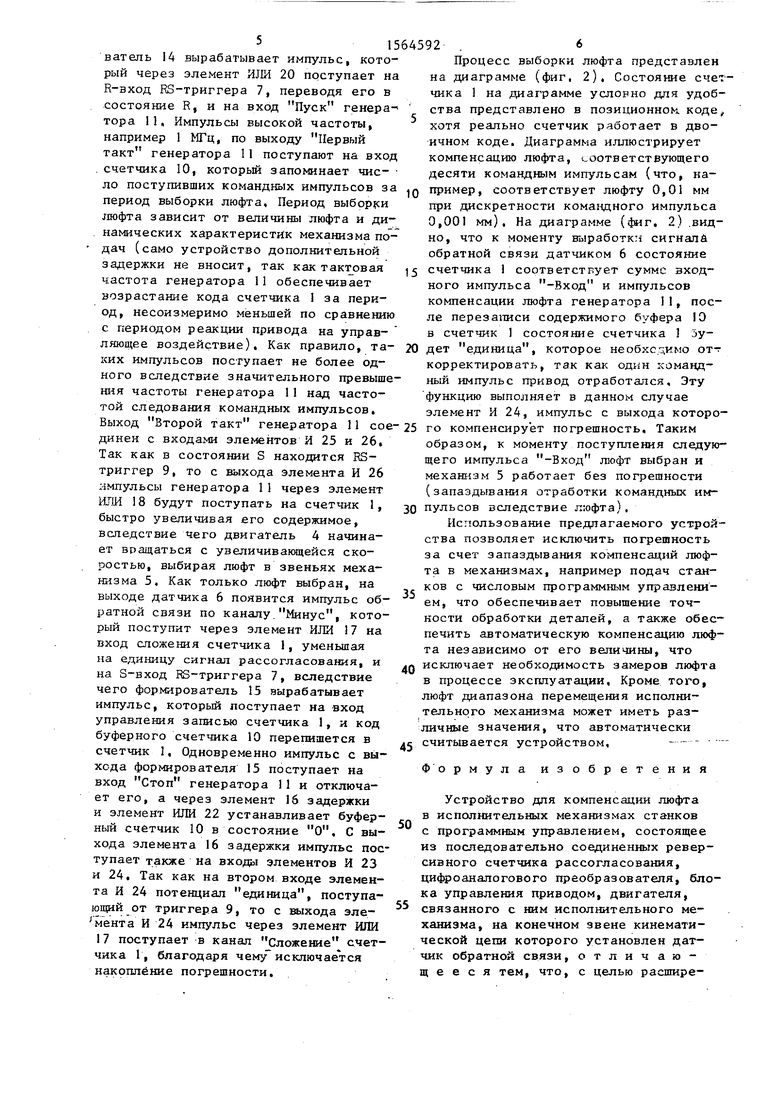
Па фиг, 1 представлена функциональная схема устройства; на фиг, 2 - временные диаграммы.
Устройство (фиг, i) состоит из ре версивного счетчика 1 рассогласования цифрозналогового преобразователя 2, блок 3 управления приводом, двигателя 4, исполнительного механизма 5 станка, датчика 6 обратдой связи, ус- тановленного на конечном звене исполнительного механизма. Перечисленные устройства образуют следящий привод, замкнутый по положению. Кроме того, в устройство входят три RG-триггера с двумя S-входами 7-9, буферный счетчик 10 импульсов, управляемый генератор 11 с двухтактным выходом, блок 12 синхронизации, три формирователя 13-15 импульсов из перепадов потенци- ала ноль-единица элемент 16 задержки, элементы ИЛИ 17-22 и элементы И 23-26.
Устройство работает следующим образом.
После включения питания входным сигналом начальной установки НУ, поступающим от устройства числового программного управления, устанавливается в нулевое состояние счетчик 1 и через элемент ИЛИ 22 счетчик 10, Работа станка с программным управлением начинается с выхода в исходные точки (нулевые точки) положения и.с
5 о 5
0
5
полнительных механизмов. При этом входным сигналом Вход триггер 8 устанавливается в состояние S, а триггер 9 - в состояние R, При выходе в исходные точки устройство не функционирует, так как формирователи 13-15 работают только при перепадах потенциала ноль-единица.
При начале движения из исходных точек устройство работает следующим образом, Поступивший первый входной импульс по каналу Вход через элемент ИЛИ 18 поступает на вход Вычитание счетчика 1, кодовый сигнал состояния счетчика 1 Минус единица цифроаналоговым преобразователем 2 преобразуется в слаботочный сигнал управления, который устанавливается блоком 3 управления приводом, и двигатель 4 начинает вращаться на максимальной частоте вращения.
Блок 3 управления приводом слаботочный сигнал усиливается по мощности и воздействует на двигатель 4, Так как сигнал вотрастает в соответствии с возрастанием кода счетчика 1, то двигатель вращается с увеличивающейся скоростью,
Так как в звеньях кинематической цепи механизма 5 имеется люфт, то конечное звено механизма 5 до выборки люфта остается неподвижным и датчик 6 сигналов обратной связи не вырабатывает. Одновременно с поступлением через элемент ИЛИ 18 на вход счетчика 1 сигнал - Вход через элемент ИЛИ 19 поступает на вход блока 12 синхронизации, где запоминается входным элементом блока 12, а также на R-вход триггера 8 и S-вход триггера 9, Вследствие перепада потенциала ноль-единица на выходе RS-триггера 9 формиро51564592
ватель 14 вырабатывает импульс, который через элемент ИЛИ 20 поступает на R-вход КЗ-триггера 7, переводя его в состояние R, и на вход Пуск генератора 11, Импульсы высокой частоты, например 1 МГц, по выходу Первый такт генератора 11 поступают на вход счетчика 10, который запоминает число поступивших командных импульсов за период выборки люфта. Период выборки люфта зависит от величины люфта и динамических характеристик механизма подач (само устройство дополнительной задержки не вносит, так как тактовая частота генератора 11 обеспечивает возрастание кода счетчика 1 за период, несоизмеримо меньшей по сравнению с периодом реакции привода на управ10
15
Процесс выборки люфта представлен на диаграмме (фиг. 2), Состояние сче чика 1 на диаграмме условно для удоб ства представлено в позиционном, коде хотя реально счетчик работает в двоичном коде. Диаграмма иллюстрирует компенсацию люфта, соответствующего десяти командным импульсам (что, например, соответствует люфту 0,01 мм при дискретности командного импульса 0,001 мм). На диаграмме (фиг. 2) вид но, что к моменту выработки сигнала обратной связи датчиком 6 состояние счетчика 1 соответствует сумме входного импульса -Вход и импульсов компенсации люфта генератора 11, пос ле перезаписи содержимого буфера 10
в счетчик 1 состояние счетчика 1 jy единица, которое необходимо от
ляющее воздействие). Как правило, та- 20 дет ких импульсов поступает не более од-корректировать, так как один командного вследствие значительного превыше- ный импульс привод отработался. Эту ния частоты генератора 11 над частотой следования командных импульсов.
функцию выполняет в данном случае элемент И 24, импульс с выхода которо
функцию выполняет в данном случае элемент И 24, импульс с выхода кото
Выход Второй такт генератора И сое-25 го компенсирует погрешность. Таким
динен с входами элементов И 25 и 26, Так как в состоянии S находится RS- триггер 9, то с выхода элемента И 26 импульсы генератора 11 через элемент ИЛИ 18 будут поступать на счетчик 1, быстро увеличивая его содержимое, вследствие чего двигатель 4 начинает вращаться с увеличивающейся скоростью, выбирая люфт в звеньях механизма 5, Как только люфт выбран, на выходе датчика 6 появится импульс обратной связи по каналу Минус, который поступит через элемент ИЛИ 17 на вход сложения счетчика 1, уменьшая на единицу сигнал рассогласования, и на S-вход КЗ-триггера 7, вследствие чего формирователь 15 вырабатывает импульс, который поступает на вход управления записью счетчика 1, и код буферного счетчика 10 перепишется в счетчик 1. Одновременно импульс с выхода формирователя 15 поступает на вход Стоп генератора 11 и отключает его, а через элемент 16 задержки и элемент ИЛИ 22 устанавливает буферный счетчик 10 в состояние О, С выхода элемента 16 задержки импульс поступает также на входы элементов И 23 и 24. Так как на втором входе элемента И 24 потенциал единица, поступающий от триггера 9, то с выхода эле- мента И 24 импульс через элемент ИЛИ 17 поступает в канал Сложение счетчика 1, благодаря чему исключается накопление погрешности.
образом, к моменту поступления след щего импульса -Вход люфт выбран и механизм 5 работает без погрешности (запаздывания отработки командных и
30 пульсов вследствие люфта).
Использование предлагаемого устр ства позволяет исключить погрешност за счет запаздывания компенсаций лю та в механизмах, например подач ста ков с числовым программным управлен ем, что обеспечивает повышение точности обработки деталей, а также об печить автоматическую компенсацию л та независимо от его величины, что исключает необходимость замеров люф в процессе эксплуатации, Кроме того люфт диапазона перемещения исполнительного механизма может иметь различные значения, что автоматически
45 считывается устройством,- - Формула изобретени
35
40
50
55
Устройство для компенсации люфта в исполнительных механизмах станков с программным управлением, состояще из последовательно соединенных ревер сивного счетчика рассогласования, цифроаналогового преобразователя, бл ка управления приводом, двигателя, связанного с ним исполнительного механизма, на конечном звене кинемати ческой цепи которого установлен датчик обратной связи.отличающееся тем, что, с целью расшире0
Процесс выборки люфта представлен на диаграмме (фиг. 2), Состояние счетчика 1 на диаграмме условно для удобства представлено в позиционном, коде, хотя реально счетчик работает в двоичном коде. Диаграмма иллюстрирует компенсацию люфта, соответствующего десяти командным импульсам (что, например, соответствует люфту 0,01 мм при дискретности командного импульса 0,001 мм). На диаграмме (фиг. 2) видно, что к моменту выработки сигнала обратной связи датчиком 6 состояние счетчика 1 соответствует сумме входного импульса -Вход и импульсов компенсации люфта генератора 11, после перезаписи содержимого буфера 10
в счетчик 1 состояние счетчика 1 jy единица, которое необходимо отектировать, так как один командный импульс привод отработался. Эту
функцию выполняет в данном случае элемент И 24, импульс с выхода которого компенсирует погрешность. Таким
образом, к моменту поступления следующего импульса -Вход люфт выбран и механизм 5 работает без погрешности (запаздывания отработки командных им-
пульсов вследствие люфта).
Использование предлагаемого устройства позволяет исключить погрешность за счет запаздывания компенсаций люфта в механизмах, например подач станков с числовым программным управлением, что обеспечивает повышение точности обработки деталей, а также обеспечить автоматическую компенсацию люфта независимо от его величины, что исключает необходимость замеров люфта в процессе эксплуатации, Кроме того, люфт диапазона перемещения исполнительного механизма может иметь различные значения, что автоматически
считывается устройством,- - Формула изобретения
Устройство для компенсации люфта в исполнительных механизмах станков с программным управлением, состоящее из последовательно соединенных реверсивного счетчика рассогласования, цифроаналогового преобразователя, блока управления приводом, двигателя, связанного с ним исполнительного механизма, на конечном звене кинематической цепи которого установлен датчик обратной связи.отличающееся тем, что, с целью расширения области применения устройства за счет исключения ошибки на контуре обрабатываемой детали, вызванной запаздыванием выборки люфта, устройство содержит буферный счетчик импульсов, три RS-триггера, управляемый генератор импульсов, шесть элементов ИЛИ, три формирователя импульсов, блок синхронизации, элемент задержки и четыре элемента И, вход Плюс устройства соединен с первым входом первого элемента ИЛИ, с первым входом второго элемента ИЛИ, с первым S-входом первого RS-триггера и R-входом второго RS-триггера, а вход Минус устройства соединен с первым входом третьего элемента ИЛИ, с вторым входом второго элемента ИЛИ, с R-входом первого триггера и с первым S-входом второ- го RS-триггера, вход Начальная установка устройства соединен с вторыми S-входами первого и второго RS-тригге- ров, с входом установки нуля счетчика рассогласования, с первым 3-вхо- дом третьего RS-триггера и с первым входом чествертого элемента ИЛЛ, второй вход которого соединен с выходом элемента задержки и с первыми входами первого и второго элементов И, причем второй вход первого элемента И соединен с S-выходом первого RS-триггера, с входом первого формирователя импульсов и с первым входом третьего элемента И, второй вход второго элемента И соединен с S-выходом второго RS- триггера, с входом второго формирователя импульсов и с первым входом четвертого элемента И, вторые входы третьего и четвертого элементов И соеди- неныс выходом второго такта управляемого генератора импульсов, выход первого такта которого соединен с синхронизирующим входом блока синхронизации, вход Пуск - с выходом пятого элемента ИЛИ и с R-входом третьего RS-триггера, вход Стоп управляемого генератора импульсов соединен с выходом третьего формирователя импульсов, с входом управления записью счетчика рассогласования и выходом элемента задержки, при этом выходы первого и второго формирователей импульсов соединены с входами пятого элемента ИЛИ, вход третьего формирователя импульсов соединен с S-выходом третьего RS-триггера, второй S-вход которого соединен с выходом шестого элемента ИЛИ, первый вход которого соединен с выходом канала положительного направления датчика обратной связи и вторым входом третьего элемента ИЛИ, второй вход шестого элемента ИЛИ соединен с выходом канала отрицательного направления датчика обратной связи и вторым входом первого элемента ИЛИ, третий и четвертый входы которого соединены соответственно с выходами второго и третьего элементов И, а выход - с входом Сложение реверсивного счетчика рассогласования, вход Вычитание которого соединен с выходом третьего элемента ИЛИ, третий и четвертый входы которого соединены соответственно с выходами первого и четвертого элементов И, при этом выход второго элемента ИЛИ соединен с синхронизируемым входом блока синхронизации, выход которого соединен с счетным входом буферного счетчика импульсов, вход установки нуля которого соединен с выходом четвертого элемента ИЛИ,
Фие.г
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для программного управления | 1979 |
|
SU862117A1 |
| Система адаптивного числового программного управления металлорежущим станком | 1980 |
|
SU954945A1 |
| Устройство для программного управления позиционного типа | 1983 |
|
SU1158976A1 |
| Устройство для управления следящим приводом | 1976 |
|
SU703781A1 |
| Позиционный регулятор для систем с запаздыванием | 1986 |
|
SU1416934A1 |
| Устройство для управления позиционированием в ноль исполнительных органов станка | 1988 |
|
SU1571549A1 |
| Следящий электропривод с компенсацией люфта | 1985 |
|
SU1273875A1 |
| Устройство для управления разгоном и торможением исполнительного двигателя станка | 1981 |
|
SU1062646A1 |
| Круговой интерполятор | 1988 |
|
SU1566321A1 |
| Цифровой регулятор | 1982 |
|
SU1019397A1 |

Изобретение относится к автоматике и вычислительной технике и может быть использовано в системах числового программного управления станками. Цель изобретения - расширение области применения устройства за счет исключения ошибки на контуре обрабатываемой детали, вызванной запаздыванием выборки люфта. Изобретение позволяет исключить погрешности за счет запаздывания компенсации люфта в механизмах подач станков с программным управлением, что повышает точность обработки деталей, а также обеспечивает автоматическую компенсацию люфта независимо от его величины, что исключает необходимость замеров люфта в процессе эксплуатации. Решение этих задач достигается введением в известное устройство, состоящее из двоичного счетчика рассогласования 1, цифроаналогового преобразователя 2, блока управления приводом 3, двигателя 4, исполнительного механизма 5 станка, датчика обратной связи 6, дополнительных элементов: трех RS-триггеров 7, 8, 9 с двумя S - входами, буферного счетчика 10, управляемого генератора 11 с двухтактным выходом, блока синхронизации 12, трех формирователей импульсов из перепадов потенциала "ноль-единица" 13, 14, 15, элемента задержки 16, элементов ИЛИ 17 - 22 и элементов И 23 - 26. 2 ил.

| Прибор для измерения расстояний между центрами отверстий | 1941 |
|
SU63613A1 |
| Японии, кл | |||
| Кипятильник для воды | 1921 |
|
SU5A1 |
| Андрейчикоз Б.И, Динамическая точность систем программного управления станками | |||
| М.: Машиностроение, 1964, с | |||
| Способ изготовления замочных ключей с отверстием для замочного шпенька из одной болванки с помощью штамповки и протяжки | 1922 |
|
SU221A1 |
| IV,23. | |||
