1 Изобретение относится к станко - ртроению, в частности к устройствам ля крепления деталей, и является усо рершенствованием изобретения по авт.св. № 1465182,
Целью изобретения является повыше- Ние точности.
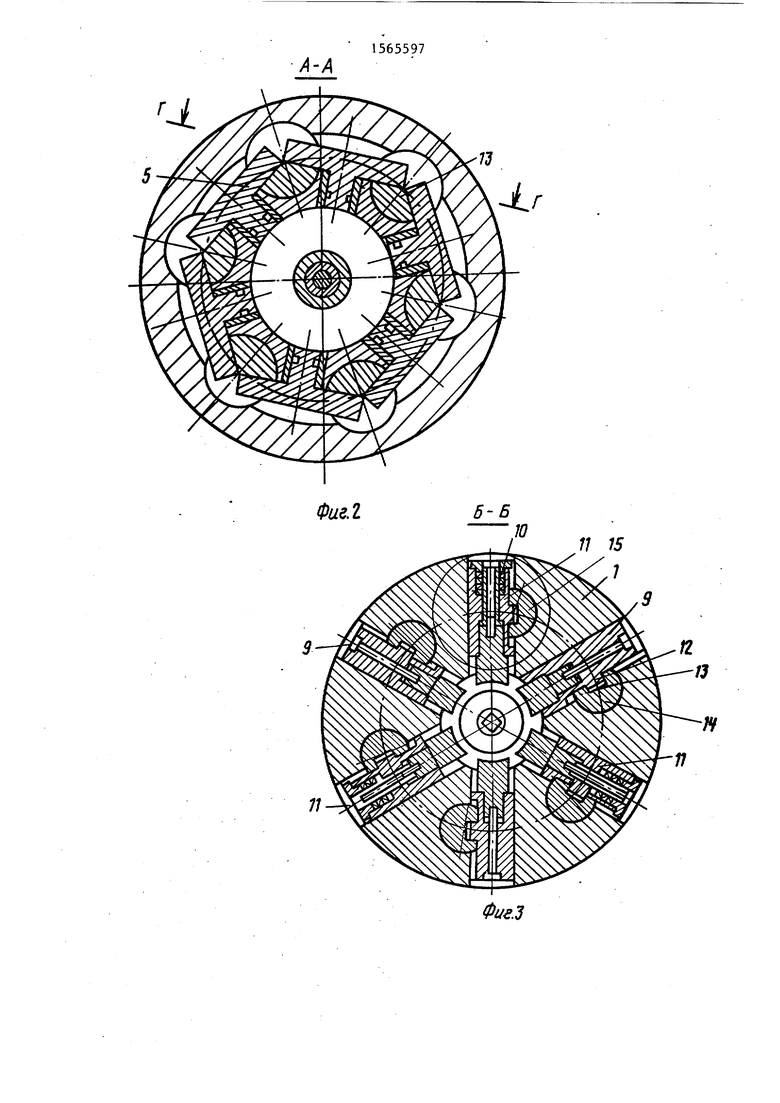
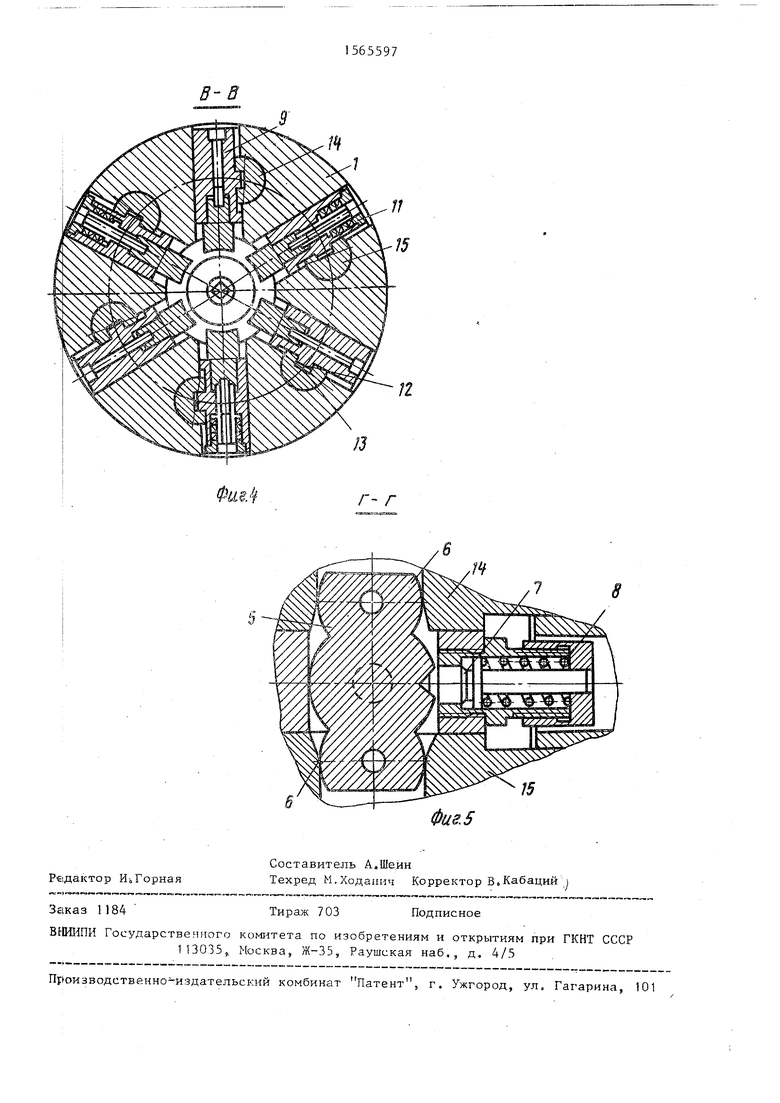
На фиг.1 показано предлагаемое устройство,разрез; нафиг.2 - сечение А-А на фиг.1; на фиг.З - сечение 3-Б на фиг.1; на фиг.4 - сечение В-В на фиг.1; на фиг,5 - сечение Г-Г ka фиг.2.
Устройство содержит корпус 1 с Планшайбой 2 и направляющим элементом 3, жестко связанным с корпусом, наружная поверхность элемента пред- Назначена для взаимодействия с внутренней цилиндрической поверхностью Сяги, выполненной в виде штока 4. На последнем установлены с возможностью поворота двуплечие рычаги 5, рабочие поверхности 6 плеч которых Ограничены частью цилиндрической поверхности, а оси поворота расположены в плоскости, перпендикулярной Йси патрона, при этом каждый рычаг 5 зафиксирован с помощью фиксатора 1/, подпружиненного с помощью пружины 8. В корпусе патрона установлены два ряда плунжеров, каждый ряд содержит Зажимные плунжеры 9 и установленные между ними подпружиненные с помощью Пружин 10 центрирующие плунжеры S1 с рабочими поверхностями, высту- Лающими относительно рабочих поверхностей зажимных плунжеров 9 на 0,4- 0,5 мм. Плунжеры 9 и 11 снабжены Клиновыми поверхностями 12, вэаимоде Ствующими с ответными клиновыми по верхностями 13, выполненными на пол-т зунах 14 и 15, при этом одно из плеч Каждого рычага 5 взаимодействует с Ползуном 14, связанным с подпружинен Вым центрирующим плунжером 11 первог ряда и зажимным плунжером 9 втррого ряда, а другое плечо рычага 5 взаимодействует с ползуном 15, связанным
5
0
5
0
5
0
5
0
5
с зажимным плунжером 9 первого ряда и центрирующим плунжером 11 второго ряда, образуя замкнутую кинематическую цепь.
Устройство работает следующим образом.
При перемещении штока 4, поскольку нагрузка от веса детали, действующая на плунжеры 9 и 11, не превышает усилия пружины 8 фиксатора 7, двуплечие рычаги 5 не поворачиваются, и происходит синхронное перемещение ползунов и связанных с ними плунжеров 9 и 11, при этом деталь сначала центрируется плунжерами 11. Синхронное перемещение центрирующих плунжеров 11 обеспечивает совмещение оси детали с осью устройства. Если деталь имеет погрешность, то после закрепления ее одним рядом центрирующих плунжеров 1 1, который раньше каг- сается поверхности детали, происходят дальнейшее перемещение штока 4 и поворот рычагов 5, которые, преодолевая усилие пружины 8 фиксаторов 7, переме- щают его. Поворачиваясь, рычаги 5. перемещают ползуны, связанные с плунжерами другого ряда, до закрепления детали центрирующими плунжерами 11 этого ряда после чего производится окончательный зажим детали зажимными 9 и центрирующими 11 плунжерами двух рядов.
Формула изобретения
Устройство для крепления деталей по авт.св. № 14651Й2, о т л и ч а к - щ е е с я тем, что, с целью повышения точности, устройство снабжено . расположенными между зажимными плунжерами каждого ряда подпружиненными центрирующими плунжерами с клиновыми поверхностями, предназначенными для взаимодействия с ответными поверхностями, выполненными на i ползунах друг того ряда, при этом каждый двуплечий рычаг снабжен подпружиненным фиксато- ром.
| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для крепления деталей муратова в.и. | 1985 |
|
SU1465182A1 |
| Зажимное устройство | 1986 |
|
SU1315220A1 |
| УСТРОЙСТВО для ПЕРЕМЕЩЕНИЯ ИЗДЕЛИЙ С ОДНОЙ ПОЗИЦИИ НА ДРУГУЮ | 1973 |
|
SU381498A1 |
| Оправка | 1989 |
|
SU1743716A1 |
| Патрон для установки вала со шпоночным пазом на центрах станка | 2024 |
|
RU2836426C1 |
| Захватное устройство | 1986 |
|
SU1351774A1 |
| Токарный патрон | 1988 |
|
SU1569093A1 |
| Схват промышленного робота | 1983 |
|
SU1122505A1 |
| Зажимное устройство для опоки и подмодельной плиты | 1980 |
|
SU939163A1 |
| Схват манипулятора | 1988 |
|
SU1585146A1 |
Изобретение относится к станкостроению, в частности к устройствам для крепления деталей. Целью изобретения является повышение точности. При перемещении штока 4 влево происходит перемещение двуплечих рычагов 5, установленных на штоке 4, рабочие поверхности плеч которых ограничены частью цилиндрической поверхности и связаны с ползунами 14 и 15, взаимодействующими клиновыми поверхностями с клиновыми поверхностями плунжеров 9 и 11, расположенных в корпусе 1 в два ряда. Каждый ряд содержит центрирующие подпружиненные 11 и зажимные 9 плунжеры, а одно из плеч каждого рычага 5 взаимодействует с ползуном, связанным с подпружиненным центрирующим плунжером 11 первого ряда и зажимным плунжером 9 второго ряда. Другое плечо каждого рычага 5 взаимодействует с ползуном, связанным с зажимным плунжером 9 первого ряда и центрирующим плунжером 11 второго ряда, образуя замкнутую кинематическую цепь. При перемещении ползунов 14 и 15 происходит сначала центрирование детали центрирующими плунжерами 11 одного ряда. Если деталь имеет погрешность, то при дальнейшем перемещении штока 4 и повороте рычагов 5, последние, преодолевая сопротивление пружины фиксатора, перемещают его. Поворачиваясь, рычаги 5 перемещают ползуны, связанные с плунжерами другого ряда, до закрепления детали центрирующими плунжерами 11 этого ряда, после чего производится окончательный зажим детали зажимными 9 и центрирующими 11 плунжерами двух рядов. 5 ил.
9-9
1 2Т)ф
Г.
Ј6SS9ЈI
V-V
Редактор И,Горная
Составитель А.Шеин
Техред М.Ходанич Корректор В.Кабаций j
Заказ 1184
Тираж 703
ВНИИПИ Государствечного комитета по изобретениям и открытиям при ГКНТ СССР 113035, Москва, Ж-35, Раушская наб„, д. 4/5
Прюизводственно-издательекий комбинат Патент, г. Ужгород, ул, Гагарина, 101
15
Фиё.5
Подписное
| Устройство для крепления деталей муратова в.и. | 1985 |
|
SU1465182A1 |
| Прибор для равномерного смешения зерна и одновременного отбирания нескольких одинаковых по объему проб | 1921 |
|
SU23A1 |
