Изобретение относится к машиностроению, а именно к схватам манипуляторов для надежного и точного захвата изделий и перемещения их в пространстве, например, между станка- ми, входящими в состав автоматической линии.
Цель изобретения - повышение производительности и надежности при захвате детали
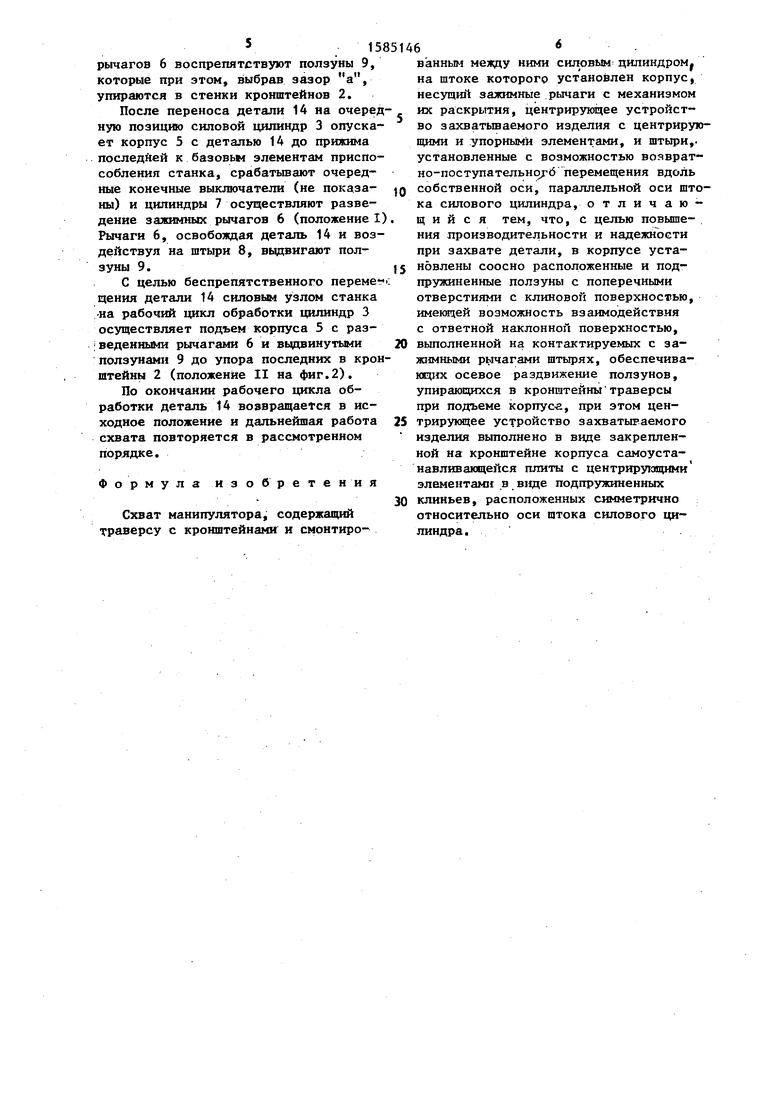
На фиг.1 изображен предлагаемый схват, разрез; на фиг.2 - то же, с разведенными зажимными рычагами и корпусом в промежуточном положении.
Схват манипулятора состоит из траверсы 1 с кронштейнами 2, на которой смонтирован силовой цилиндр 3, к штоку 4 которого прикреплен корпус 5 с шарнирно установленными на нем зажимными рычагами 6 и механизмом их раскрытия, выполненным в виде цилиндров 7.
В корпусе 5 установлены с возможностью возвратно-поступательного перемещения вдоль собственной оси, параллельной оси итока 4, штыри 8, а так- же соосно расположенные ползуны 9.
Ползуны 9 подпружинены навстречу один другому пружиной 10 и содержат поперечное отверстие с клиновой поверхностью 11, взаимодействующей с ответной наклонной поверхностью шты- ,рей 8, находящихся во взаимодействии с одним из плеч зажимных рычагов посредством роликов 12.
Кроме того, корпус 5 содержит крон штейн 13 со смонтированным в нем центрирующим устройством захватываемого из делия 14, выполненным в виде самоустанавливающейся плиты 15 с центрирующими клинвямд 16, оси .которых сим- метричны относительно оси штока 4 силового цилиндра 3. Клинья 16 подпружинены в осевом направлении пружинами 17.
5
30
35
40
45
jg 55
Схват манипулятора работает сле- 5 дующим образом.
В исходном положении корпус 5 с раскрытыми рычагами 6 располагаются над позицией загрузки, где деталь 14 ориентируется в горизонтальной плос- 0 кости, или над приспособлением позиции обработки (положение II на фиг.2).
Для зажима и переноса детали 14 силовому цилиндру 3 подается команда на опускание корпуса 5. При опускании корпуса 5 последний самоустанавливающейся плитой 15 прижимает деталь 14 к базовым элементам приспособления, а подпружиненные клинья 16 входят в контакт с внутренней поверхностью детали 14, не смещая ее в горизонтальной плоскости.
В этом положении I корпуса 5 срабатывает конечный выключатель (не показан), дающий команду цилиндрам 7 на зажим детали 14. При этом зажимные рычаги 6 сводятся и осуществляют зажим детали 14, которая сохраняет свое ориентированное положение даже если рычаги 6 сводятся неодновременно, так как усилие цилиндра 3, передаваемое через плиту 15, и боковые поверхности клиньев 16 препятствуют смещению детали.
При сведении зажимных рычагов 6 кинематически связанные с ними штыри 8 под действием пружины 10 опускаются, а ползуны 9 утапливаются в положение, изображенное на фиг.1, образуя некоторый зазор а с целью беспрепятственного подъема корпуса 5 с зажатой деталью 14.
После этого цилиндр 3 осуществляет подъем корпуса 5 в верхнее крайнее положение III - выше уровня выступающих частей станков, а манипулятор перемещает траверсу 1 на следующую позицию обработки.
В случае аварии (течь или пробой трубопровода и т.п.) самораскрытию
рычагов 6 воспрепятствуют ползуны 9, которые при этом, выбрав зазор а, упираются в стенки кронштейнов 2.
После переноса детали 14 на очередную позицию силовой цилиндр 3 опускает корпус 5 с деталью 14 до прижима последней к базовым элементам приспособления станка, срабатывают очередные конечные выключатели (не показаны) и цилиндры 7 осуществляют разведение зажимных рычагов 6 (положение I) Рычаги 6, освобождая деталь 14 и воздействуя на штыри 8, выдвигают ползуны 9.
С целью беспрепятственного перемеценил детали 14 силовым узлом станка -на рабочий цикл обработки цилиндр 3 осуществляет подъем корпуса 5 с разведенными рычагами 6 и выдвинутыми ползунами 9 до упора последних в кронштейны 2 (положение II на фиг.2).
По окончании рабочего цикла обработки деталь 14 возвращается в исходное положение и дальнейшая работа схвата повторяется в рассмотренном порядке.
Формула изобретения
Схват манипулятора, содержащий траверсу с кронштейнами и смонтиро0
0
S
5
0
ванным между ними силовым цилиндром на штоке которого установлен корпус, несущий зажимные рычаги с механизмом их раскрытия, центрирующее устройство захватываемого изделия с центрирующими и упорными элементами, и штыри,, установленные с возможностью вояврат- но-поступательногб перемещения вдоль собственной оси, параллельной оси штока силового цилиндра, отличающийся тем, что, с целью повышения производительности и надежности при захвате детали, в корпусе установлены соосно расположенные и подпружиненные ползуны с поперечными отверстиями с клиновой поверхностью, имеющей возможность взаимодействия с ответной наклонной поверхностью, выполненной на контактируемых с зажимными рычагами штырях, обеспечивающих осевое раздвижение ползунов, упирающихся в кронштейны траверсы при подъеме корпуса, при этом центрирующее устройство захватываемого изделия выполнено в виде закрепленной на кронштейне корпуса самоуста- навливакщейся плиты с центрирующими элементами в виде подпружиненных клиньев, расположенных симметрично относительно оси штока силового цилиндра .
11
Фиг. 2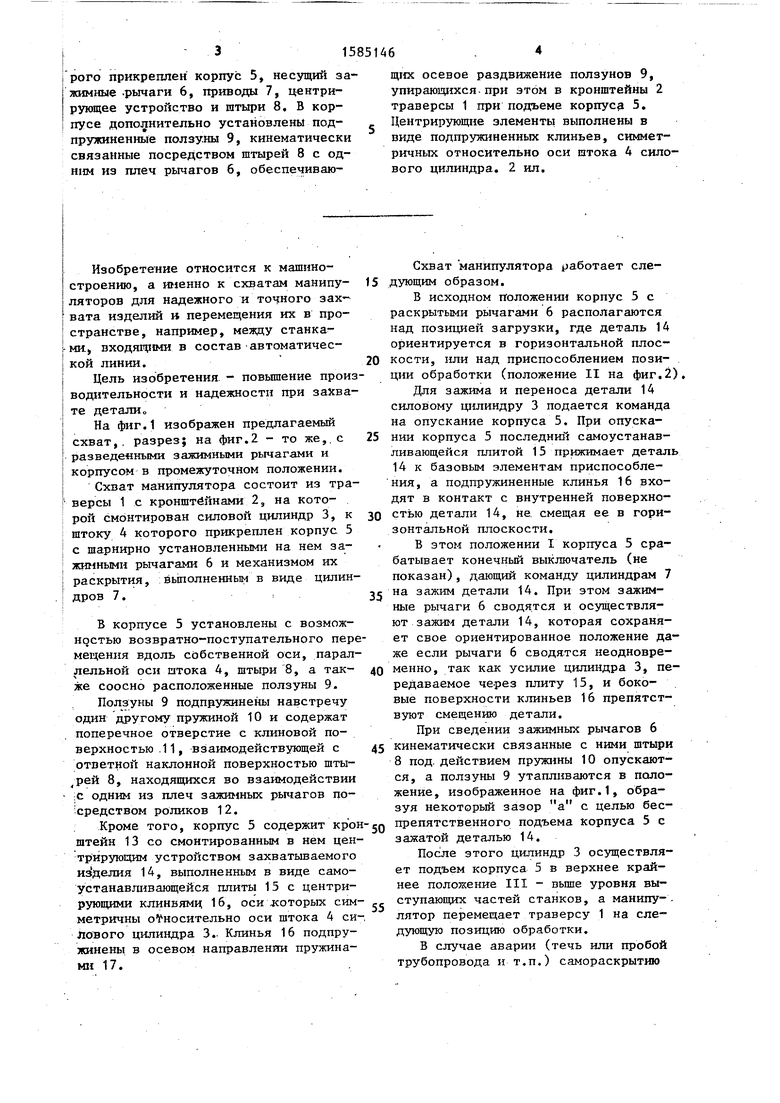
| название | год | авторы | номер документа |
|---|---|---|---|
| Автоматизированный комплекс для штамповки крупногабаритных деталей | 1985 |
|
SU1324725A1 |
| Металлорежущий станок с устройством для автоматической смены многошпиндельных коробок | 1988 |
|
SU1521552A2 |
| Схват робота | 1986 |
|
SU1350004A1 |
| Схват манипулятора | 1983 |
|
SU1057273A1 |
| Автоматическая линия | 1986 |
|
SU1465263A1 |
| Автоматическая линия для многопереходной штамповки | 1987 |
|
SU1565563A1 |
| Манипулятор для кантования корпусных деталей | 1990 |
|
SU1750941A1 |
| Манипулятор | 1983 |
|
SU1151450A1 |
| Манипулятор | 1979 |
|
SU823071A1 |
| Автоматизированный комплекс для штамповки деталей | 1987 |
|
SU1581436A1 |
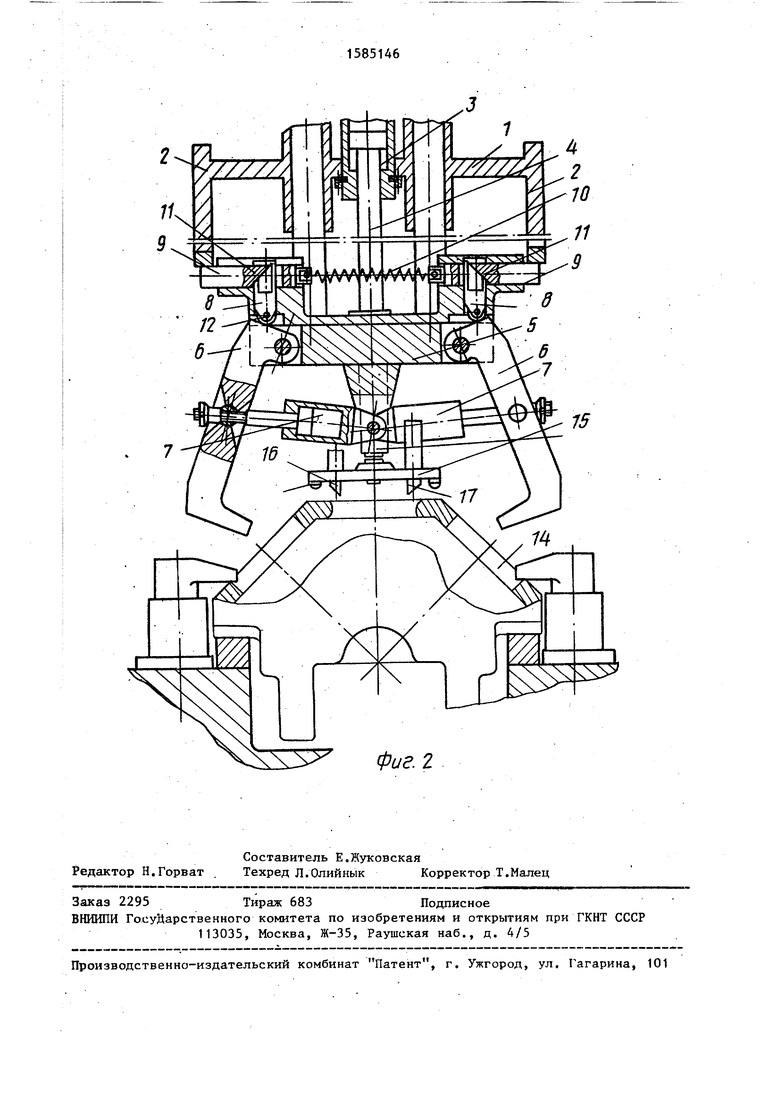
Изобретение относится к машиностроению, а именно к схватам манипуляторов для надежного и точного захвата изделий и перемещения их в пространстве, например, между станками, входящими в состав автоматической линии. Целью изобретения является повышение производительности и надежности при захвате детали. Схват содержит траверсу 1 с кронштейнами 2 и силовым цилиндром 3, к штоку 4 которого прикреплен корпус 5, несущий зажимные рычаги 6, приводы 7, центрирующее устройство и штыри 8. В корпусе дополнительно установлены подпружиненные ползуны 9, кинематически связанные посредством штырей 8 с одним из плеч рычагов 6, обеспечивающих осевое раздвижение ползунов 9, упирающихся при этом в кронштейны 2 траверсы 1 при подъеме корпуса 5. Центрирующие элементы выполнены в виде подпружиненных клиньев, симметричных относительно оси штока 4 силового цилиндра. 2 ил.
| Схват манипулятора | 1983 |
|
SU1057273A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
