II
Известно устройство для перемещения деталей с одной позиции на другую, состоящее из захватного органа, смонтированного на подвижной каретке, и гидроцилиндра для его перемещения, в котором захватный орган выполнен в виде двух раздвижных планок, каждый конец которых щарнирно соединен с одной из двух зубчатых реек, связанных между собой посредством щестерни, смонтированной на ползуне, фиксация которого в крайних положениях осуществляется посредством взаимодействия установленного на направляющей щарикового фиксатора с пазами, выполненными на ползуне, удерживаемом на месте щариковыМ фиксатором в момент освобождения и зажима детали захватным органом. Недостатком известного устройства является непостоянство силы захвата детали вследствие срабатывания щарикового фиксатора.
Предлагаемое устройство отличается от известного тем, что подвижная каретка снабжена шарнирно связанным со щтоком силового цилиндра подпружиненным с двух сторон ползуном, имеющим на своих концах упоры, поочередно взаимодействующие с плечом двуплечего рычага, второе плечо которого в свою очередь вза имодействует с другим ползуном, несущим клиновой механизм, сообщающий движение подвижной губке захватного органа. Такое выполнение устройства
для перемещения изделий повышает надежность его работы.
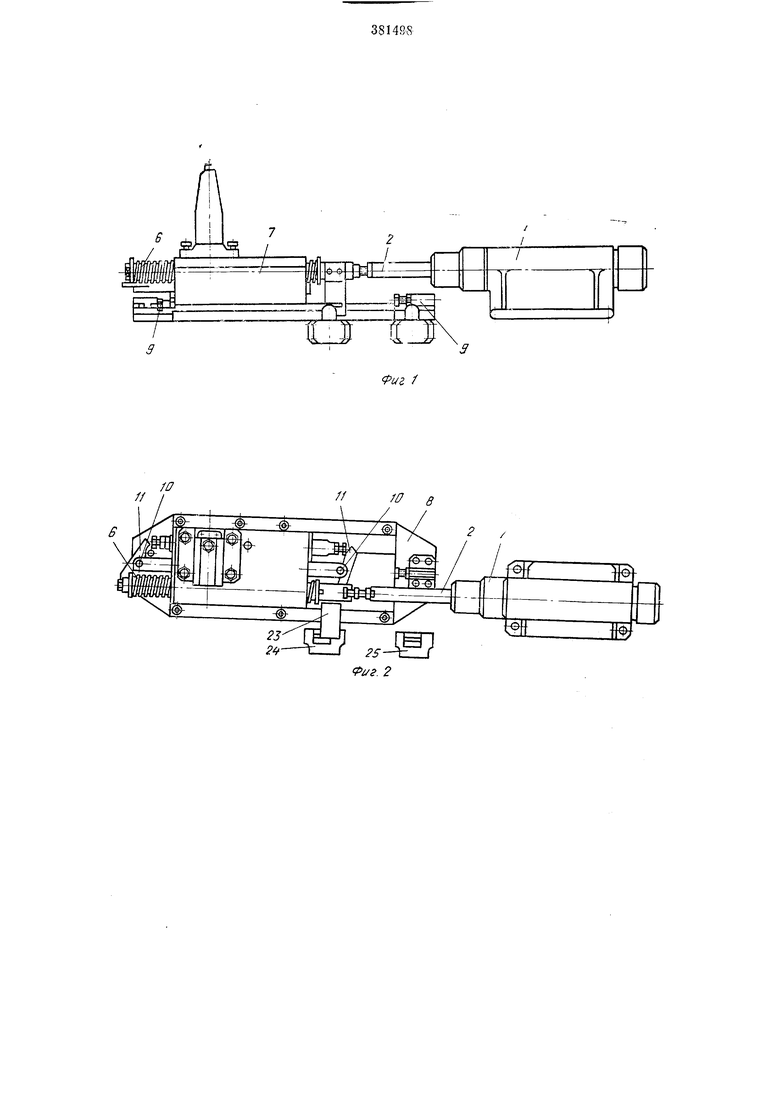
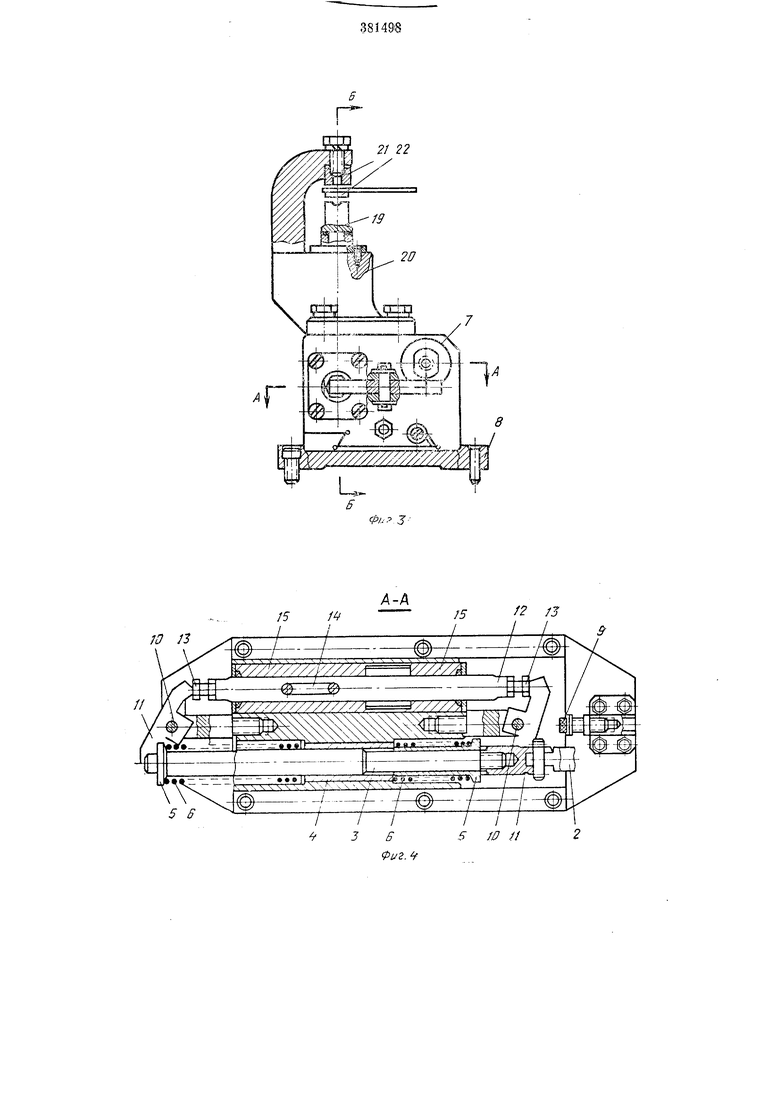
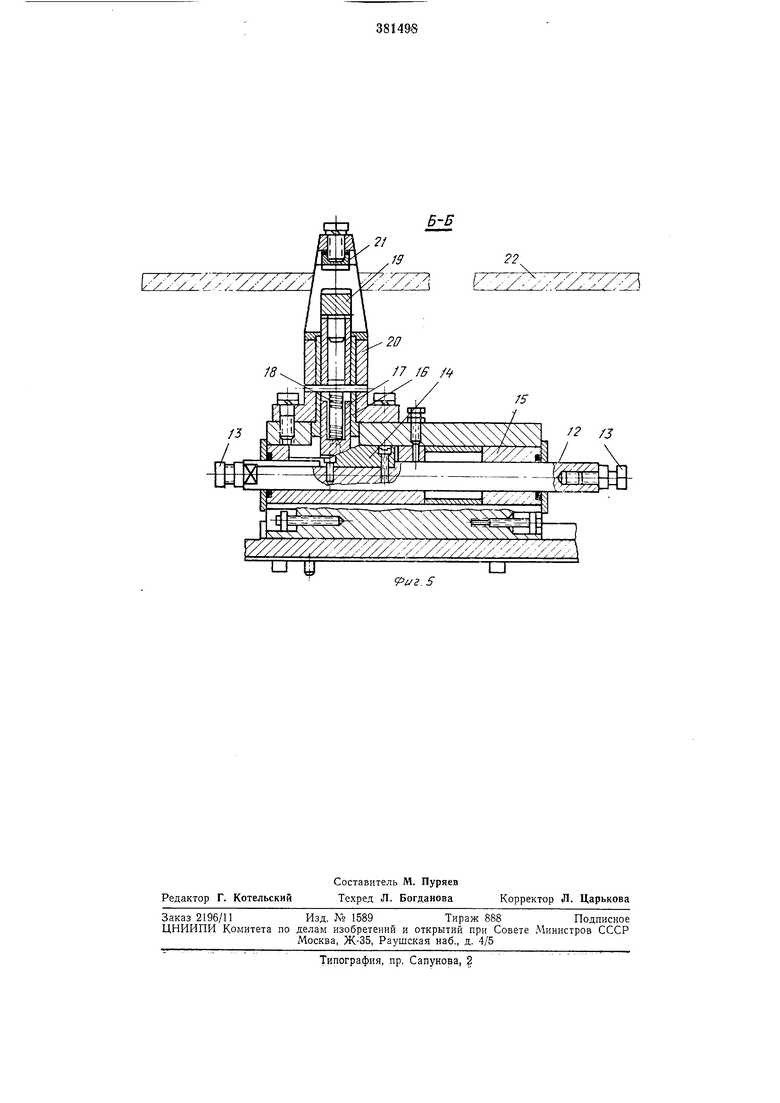
На фиг. I-3 изображено предлагаемое устройство в трех проекциях; на фиг. 4 - разрез по А-А на фиг. 3; на фиг. 5 - разрез по Б-Б на фиг. 3.
Устройство для перемещения изделий с одной позиции на другую содержит силовой цилиндр 1, щток 2 которого щарнирно связан с
ползуном 3 (см. фиг. 4), перемещающимся во втулках 4 и снабженным с двух сторон упорами 5. На ползуне 5 центрируются пружины 6, ограниченные с одной стороны упорами 5, а с другой - корпусом подвижной
каретки 7, перемещающейся в направляющих плиты 8 (см. фиг. 3), на которой размещены регулируемые упоры 9. К корпусу 7 жестко прикреплены с двух сторон оси 10 двуплечих рычагов П (см. фиг. 2). В корпусе 7 расположен ползун 12, снабженный с
двух сторон регулируемыми упорами 13 и
содержащий в своей средней части клин М.
Ползун 12 перемещается во втулках 15.
В расточке корпуса 7 во втулках 16 перемещается подвижная губка 17 (см. фиг. 5), имеющая внутри пружину 18 и зажимную пяту 19. Втулки 16 запрессованы в кронщтейн 20, являющийся неподвижной губкой, жестко прикрепленной к корпусу 7. На кронщтейне 20 имеется неподвижная пята 21, к
которой поджимается подвижной губкой 17 перемещаемое изделие 22.
На ползуне 3 закреплен флажок 23 (см. фиг. 1), включающий поочередно конечные выключатели 24 и,.2,. цередающ ие сигналы в систему управлени-ях:
Устройство работает в следующей последовательности.. , .;:
После получения соответотвующей команды от системы управления силовой цилиндр / своим щтаком 2 сообщает движение ползуну сЗ, который перемещается вправо до тех пор, пока усилия предварительно сжатых пружин 6 не уравновесятся. После этого начинает перемещаться корпус подвижной каретки 7 в нап ра вляющих плиты. 8 до тех пор, пока его не остановит правый регулируемый упор 9. В этот момент двуплечие рычаги // не контактируют ни с упорами 5 ползуна 3, ни с регулируемыми упорами 13 ползуна 12 механизма захвата.
После остановки корпуса 7 ползун .3 продолжает перемещаться вправо до тех пор, пока правый упор 5 при помощи рычага 11 и упоров 13 не переместит ползун 12 влево. При этом клин 14 своим скосом сообщает движение подвижной губке 17, преодолевая сопротивление Пружины 18, до сжатия изделия 22 зажимной пятой 19 и неподвижной пятой 21. В этот момент срабатывает конечный выключатель 25, получивщий сигнал от флажка 23, закрепленного на ползуне 5.
Для компенсации погрещности размеров допуска поперечного сечения вала упор 5 выполняют в виде подвижной втулки, гарантируя тем самым надежное зажатие изделия, после которого и получает команду конечный выключатель 25. Шток 2 силового цилиндра перемещает ползун 5 до тех пор, пока правая пружина 6, разжимаясь, не уравновесит усилие левой; лищь после этого корпус подвижной каретки 7 вместе с зажатой деталью 22, пятами 19 и 21, кронщтейном 20 начнет передвигаться влево, при этом усилие трения, инерционные толчки и т. д. гасятся предварительно сжатыми пружинами 6. Двуплечие рычаги 11 опять находятся в освобол денном состоянии до тех пор, пока корпус 7
не будет остановлен левым упором 9.
После остановки корпуса 7 через некоторый гаранти1рованный зазор левый упор 5 поворачивает двуплечий рычаг 11, который через левый упор 13 перемещает ползун 12
и клин 14 до тех пор, пока подвижная губка 17 под действием пружины 18 не опустится вниз, освобождая изделие 22.
В этот момент начинает включаться конечный выключатель 24, дающий команду на повторное движение.
В случае перехода на другой по толщине типоразмер изделия заменяются пяты 19 и 21, которые вьшолнены сменными.
Предмет изобретения
Устройство для перемещения изделий с одной позиции на другую с захватным органом, смонтированным на подвижной каретке, отличающееся тем, что, с целью повышения
надежности его работы, подвижная каретка снабжена щарнирно связанным со щтоком силового цилиндра подпружиненным с двух сторон ползуном, имеющим на своих концах упоры, поочередно взаимодействующие с плечом двуплечего рычага, второе плечо которого в свою очередь взаимодействует с другим ползуном, несущим клиновой механизм, со общающий движение подвижной губке захватного органа. ТИ (LJ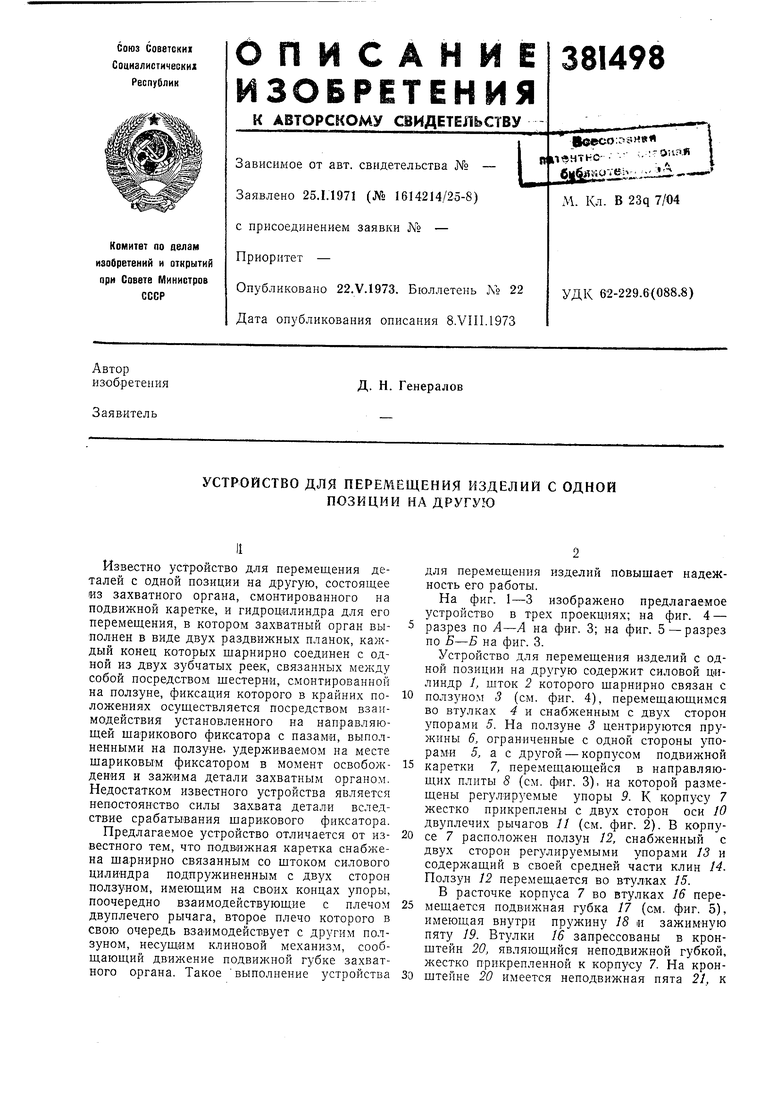

| название | год | авторы | номер документа |
|---|---|---|---|
| Установка для подачи листов к гильотинным ножницам | 1981 |
|
SU1016093A1 |
| Манипулятор | 1987 |
|
SU1423368A1 |
| Прижимное устройство | 1985 |
|
SU1306677A1 |
| Устройство для подачи листового материала в зону обработки | 1987 |
|
SU1442301A1 |
| Адаптивный захват | 1988 |
|
SU1542796A1 |
| Захват | 1983 |
|
SU1117206A1 |
| Устройство для транспортировки и поворота изделий в поточной линии | 1981 |
|
SU995439A1 |
| Манипулятор для горизонтально-ковочных машин | 1981 |
|
SU1082540A1 |
| Устройство для многоколенной гибки труб | 1990 |
|
SU1734907A1 |
| Клещевая головка хобота ковочного манипулятора | 1983 |
|
SU1133013A1 |
//fO
В
2 /51 Ю Л IIII 4-3 ff5
21 22 Фиг. 1 I }О i 1-1 Щ Ялг. 5
