Изобретение относится к подъемно-транспортному машиностроению, а именно к ленточным конвейерам с промежуточными приводами.
Цель изобретения - повышение надеж- ности работы конвейера путем снижения динамических нагрузок на конвейерную ленту при пуске и изменении загрузки конвейера.
На фиг. 1 показана схема ленточного конвейера; на фиг. 2 - промежуточный привод в рабочем положении; на фиг. 3 - то же, в нерабочем положении.
Ленточный конвейер включает огибающую барабаны 1 и 2 конвейерную ленту 3 и промежуточный привод. Последний со дер- жит расположенные между грузонесущей и холостой ветвью ленты 3 приводной 4 и натяжной 5 барабаны, охватываемые резинотканевой лентой 6, и магнитную систему 7. Конвейер снабжен датчиками 8 загрузки конвейера, установленными перед промежуточным приводом. Промежуточный привод снабжен бесприводным ферромагнитным бесконечно замкнутым контуром 9, который установлен над грузонесущей ветвью ленты 3 с возможностью взаимодействия с ней. Контур 9 может быть выполнен, например, из резинотросовой ленты или круг- лозвенных цепей со скребками. Магнитная система 7 установлена между рабочей и нерабочей ветвями ленты 6 с возможностью взаимодействия с контуром 9 посредст- вом магнитного поля. Магнитная система 7 и контур 9 установлены с возможностью перемещения в вертикальной плоскости в противоположных направлениях посредством рычагов 10 и 11 и приводного механизма 12. Последний связан с датчи- ками 8 через блок 13 управления и может быть выполнен, например, в виде гидроцилиндра.
Конвейер работает следующим образом. При полностью и равномерно загруженной ленте 3 для устойчивого транспортирования без рывков и пробуксовок достаточно тягового усилия, создаваемого верхней рабочей ветвью ленты 6 промежуточного привода. При этом лента 3 движется между барабанами 1 и 2 равномерно и испытывает стабильные расчетные натяжения. При этом, датчики 8 выдают на блок 13 управления сигнал о наличии груза на ленте 3 и приводной механизм 12 поддерживает рычаги 10 и 11 в положении, при котором контур 9 находится к крайнем верхнем положении и не препятствует прохождению грузов на ленте 3, а магнитная система 7 - в крайнем нижнем положении, при котором провисающая под действием силы тяжести груза и грузонесущей ленты 3 лента 6 их не касается.
0
5 5 0 5
0 5
При пуске холостой либо частично загруженной ленты 3 датчики 8 передают сигнал на блок 13 управления об отсутствии груза на ленте 3, который включает приводной механизм 12. Рычаги 10 и 11 опускают контур 9 на ленту 3, а магнитная система 7 подымается в крайнее верхнее положение, при котором обеспечивается минимальный воздушный зазор между незагруженной лентой 3 и магнитной системой 7. Системы 7 вступают в магнитное взаимодействие с ферромагнитным контуром 9.
При появлении груза на контролируемом участке трассы конвейера блок 13 управления, получив сигнал от датчиков 8, с задержкой времени, равной времени прохождения фронта груза от последнего по ходу ленты датчика 8 до начала контура 9, включает приводной механизм 12, который подымает контур 9 в крайнее верхнее и опускает систему 7 в крайнее нижнее положения, обеспечивая свободный проход груза под контуром 9. Контур 9 смещен относительно рабочей ветви ленты 6 промежуточного привода в направлении движения грузонесущей ленты 3, что позволяет осуществлять вывод контура 9 из контакта с лентами 3 и 6 при частично загруженной ленте 3 на участке ее взаимодействия с рабочей ветвью ленты 6 промежуточного привода.
Формула изобретения
Ленточный конвейер, включающий огибающую барабаны конвейерную ленту и промежуточный привод, содержащий расположенные между грузонесущей и холостой ветвью конвейерной ленты приводной и натяжной барабаны, охватываемые резинотканевой лентой, и магнитную систему, отличающийся тем, что, с целью повышения надежности работы конвейера путем снижения динамических нагрузок на конвейерную ленту при пуске и изменении загрузки конвейера, он снабжен датчиками загрузки конвейера, установленными перед промежуточным приводом, а промежуточный привод снабжен бесприводным ферромагнитным контуром, установленным над грузонесущей ветвью конвейерной ленты с возможностью взаимодействия с ней, при этом магнитная система установлена между рабочей и нерабочей ветвями резинотканевой ленты с возможностью магнитного взаимодействия с бесприводным ферромагнитным контуром, причем магнитная система и бесприводной ферромагнитный контур установлены с возможностью перемещения в вертикальной плоскости в противоположных направлениях посредством рычагов и приводного механизма, связанного с датчиками загрузки конвейера.
ч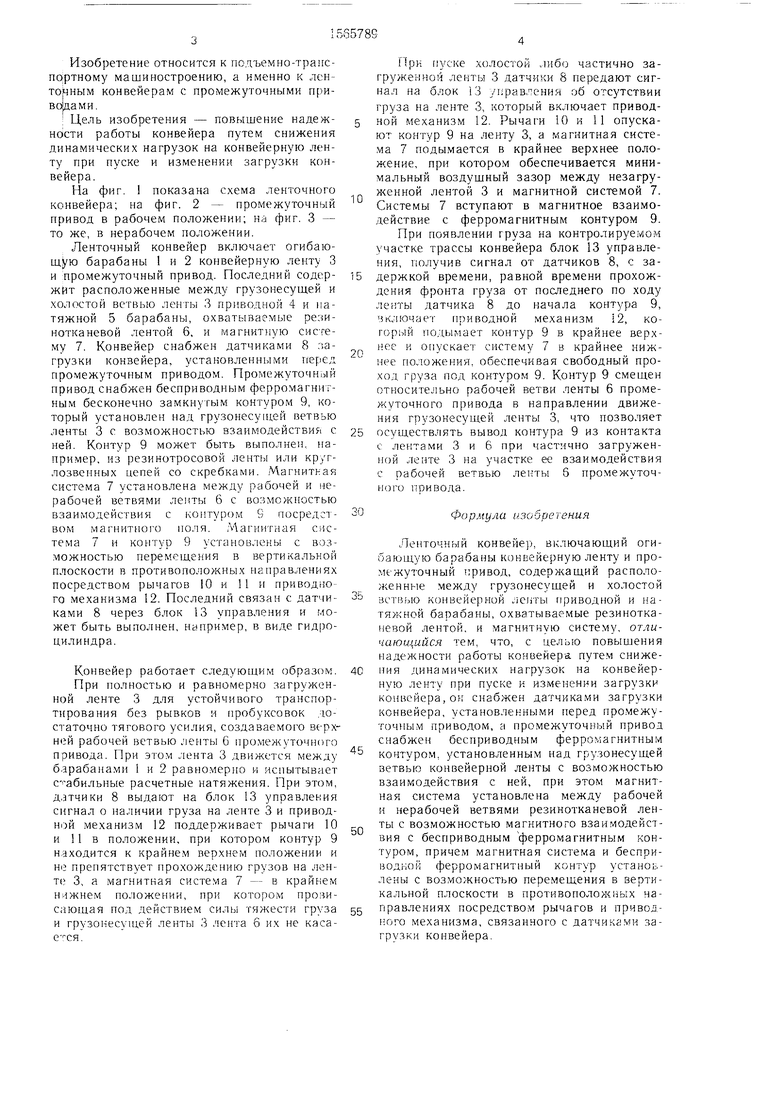
| название | год | авторы | номер документа |
|---|---|---|---|
| Ленточный конвейер для транспортирования ферромагнитных грузов | 1990 |
|
SU1751102A1 |
| Крутонаклонный ленточный магнитный конвейер для транспортирования ферромагнитных грузов | 1986 |
|
SU1411227A1 |
| Промежуточный привод ленточного конвейера | 1989 |
|
SU1781148A1 |
| ЛЕНТОЧНЫЙ КОНВЕЙЕР С ПОДВЕСНОЙ ЛЕНТОЙ | 2007 |
|
RU2342300C1 |
| Промежуточный привод ленточного конвейера | 1985 |
|
SU1247323A1 |
| Ленточный конвейер | 1982 |
|
SU1033386A1 |
| ЛЕНТОЧНО-ЦЕПНОЙ КОНВЕЙЕР | 2003 |
|
RU2239591C1 |
| ЛЕНТОЧНЫЙ КОНВЕЙЕР С ПОДВЕСНОЙ ЛЕНТОЙ | 2007 |
|
RU2342299C1 |
| Промежуточный привод ленточного конвейера | 1985 |
|
SU1247324A1 |
| ЛЕНТОЧНЫЙ КОНВЕЙЕР С ПОДВЕСНОЙ ЛЕНТОЙ | 2005 |
|
RU2294879C1 |
Изобретение относится к подъемно транспортному машиностроению, а именно к ленточным конвейерам с промежуточным приводом. Цель - повышение надежности работы конвейера путем снижения динамических нагрузок на конвейерную ленту (Л) при пуске и измерении загрузки конвейера. Он имеет огибающую барабаны 1 и 2 конвейерную Л 3 и промежуточный привод. Последний содержит расположенные между грузонесущей и холостой ветвью Л 3 приводной 4 и натяжной 5 барабаны, охватываемые резинотканевой Л 6, и магнитную систему (МС) 7. Конвейер снабжен датчиками 8 загрузки конвейера, установленными перед промежуточным приводом. Последний снабжен бесприводным ферромагнитным контуром (ФК) 9, который установлен над грузонесущей ветвью Л 3 с возможностью взаимодействия с ней. При этом МС 7 установлена между рабочей и нерабочей ветвями Л 6 с возможностью взаимодействия с ФК 9 посредством магнитного поля. Элементы МС 7 и ФК 9 установлены с возможностью перемещения в вертикальной плоскости в противоположных направлениях посредством рычагов 10 и 11 и приводного механизма 12. Последний связан с датчиками 8 через блок 13 управления. При отсутствии груза ФК 9 лежит на Л 3, а МС 7 находится в крайнем верхнем положении. С появлением груза срабатывает блок управления 13, который подает сигнал на включение привода 12. В результате чего ФК 9 переходит в крайнее верхнее положение, а МС 7 - в крайнее нижнее. 3 ил.
| Шахмейстер Л | |||
| Г., Солод Г | |||
| И | |||
| Подземные конвейерные установки.- М.: Недра, 1976, с | |||
| Вага для выталкивания костылей из шпал | 1920 |
|
SU161A1 |
| Промежуточный привод ленточного конвейера | 1985 |
|
SU1247324A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
