Изобретение относится к подъемно- транспортному машиностроению, а именно к конструкции промежуточных приводов ленточных конвейеров.
Известен промежуточный привод ленточного конвейера, в котором для создания тягового усилия используется сила тяжести основных элементов привода: приводного элемента - барабанного исполнительного органа и приводных блоков. Однако, данный привод обладает пониженной тяговой способностью, т. к. сила тяжести подвижных в вертикальной плоскости элементов привода лишь частично участвует в создании тягового усилия. Это обусловлено тем, что гравитационные силы этих элементов воспринимаются как опорными роликами в зоне контакта приводного барабана с лентой конвейера, как и подвижной опорой. Часть гравитационных сил, приходящаяся на подвижную опору, передается на закрепленную на почве направляющую и в создании тягового усилия не участвует.
Наиболее близким по технической сути и достигаемому результату является промежуточный привод ленточного конвейера, содержащий фрикционно взаимодействующую с лентой конвейера приводную ленту, огибающую приводной и обводной барабаны, расположенные на каретке с установленными на ней концами осей прижимных роликов, и стационарную раму. В данном приводе, с целью повышения тяговой способности привода путем автоматического регулирования сил сцепления приводной ленты с лентой конвейера, рама выполнена с вертикальными, а каретка - с наклонными к продольной оси конвейера направляющими, в которых расположены концы осей прижимных роликов. При этом каретка выполнена подпружиненной с возможностью перемещения по раме вдоль ленты конвейера.
VI 00
00
Привод работает следующим образом.
При передаче тягового усилия за счет предварительного нажатия прижимных роликов возникает сила реакции, смещающая подвижную каретку относительно закрепленной на почве рамы привода. При этом оси прижимных роликов должны перемещаться в вертикальных направляющих рамы и в наклонных направляющих каретки. Данное перемещение прижимных роликов должно автоматически регулироваться в зависимости от нагрузки на конвейер, т. е. от сил сопротивления движению ленты конвейера, и должно повышать тяговую способность привода при возрастании нагрузки.
Однако рассматриваемый промежуточный привод имеет пониженную тяговую способность.
Это определяется прежде всего тем, что верхняя ветвь ленты конвейера с рабочей ее стороны на участке промежуточного привода, как и по всей длине конвейера, не имеет ограничителей перемещения, прижатие к которым лент привода и конвейера-прижимными роликами при перемещении каретки обусловило бы возрастание сил сцепления между приводным и грузонесущим контурами. Поэтому подъем верхних роликоопор при движении их осей в вертикальных пазах рамы привода не обеспечит повышения тягового усилия верхней ветви привода, т. к. нормальное давление в зоне контакта лент при реальном значении подъема только поддерживающих роликоопор не изменится. Таким образом, повышение тяговой спо- собности за счет автоматического регулирования сил сцепления приводной и грузонесущей лент на верхней ветви привода рассматриваемой конструкции отсутствует.
Кроме того, привод взаимодействует с обеими ветвями конвейера и способен перемещаться под воздействием силы реакции, противоположной по направлению передаваемому тяговому усилию. Однако, тяговые усилия, создаваемые верхней и нижней ветвями привода, имеют взаимно противоположные направления. Следовательно, при равенстве реализуемых ветвями привода тяговых усилий его каретка перемещаться не будет, т. к. сила реакции будет равна нулю, и повышения тяговой способности привода в целом за счет автоматического регулирования сил сцепления приводной и грузонесущей лент в данном случае наблюдаться не будет.
Если тяговое усилие, реализуемое верхней ветвью привода, будет превосходить тяговое усилие его нижней ветви, что возможно, например, при полностью загруженной грузонесущей ленте конвейера, каретка привода будет перемещаться в направлении от разгрузочного барабана конвейера к хвостовому. При этом ролики на
нижней ветви будут отжиматься наклонными направляющими каретки от приводной ленты и тяговая способность привода будет снижаться.
Некоторый положительный эффект бу0 дет достигаться при условии реализации большего тягового усилия нижней ветвью привода. В этом случае сила реакции будет перемещать каретку привода в направлении к разгрузочному барабану конвейера,
5 прижимные ролики будут прижиматься дополнительно к приводной ленте и, в конечном итоге тяговая способность нижней ветви повысится. Однако, возможное повышение тяговой способности будет снижать0 ся тяговым усилием верхней ветви привода и усилием растяжения пружины, направленным противоположно усилию реакции.
Рассматриваемый привод будет обладать пониженной тяговой способностью да5 же при взаимодействии только с нижней ветвью ленты конвейера.
В этом случае, результирующее значение силы реакции, определяющей увеличение нормального давления в зоне контакта
0 проводной и грузонесущей лент, будет снижено на величину усилия растяжения пружины, возвращающей каретку привода в исходное положение.
Кроме того, данный привод обладает
5 пониженной тяговой способностью ввиду того, что силы тяжести всех его элементов, за исключением нижней ветви приводного контура и нижних прижимных роликов, не участвуют в увеличении нормального давле0 ния в зоне контакта лент, т. е. не создают дополнительного тягового усилия.
Целью изобретения является повышение тяговой способности привода за счет использования сил тяжести его элементов и
5 автоматического регулирования усилия прижатия проводного контура к ленте конвейера.
Указанная цель достигается тем, что известный промежуточный привод ленточного
0 конвейера, включающий приводную ленту, огибающую установленные на раме приводной, натяжной и прижимные элементы, с возможностью взаимодействия с холостой ветвью конвейерной ленты и размещенные
5 под последней поддерживающие ролики, размещенные со смещением по горизонтали относительно приводного, натяжного и прижимных элементов, дополнительно снабжен телескопическими тягами шарнир- но соединенными с рамой с возможностью
плоско-параллельного перемещения последней в вертикальной плоскости, при этом телескопические тяги выполнены с ограничителями их хода.
Предлагаемый промежуточный привод обладает повышенной тяговой способностью благодаря использованию для создания тягового усилия силы тяжести элементов привода и автоматического дополнительного прижатия приводного контура к грузонесущему при возрастании нагрузки на конвейер.
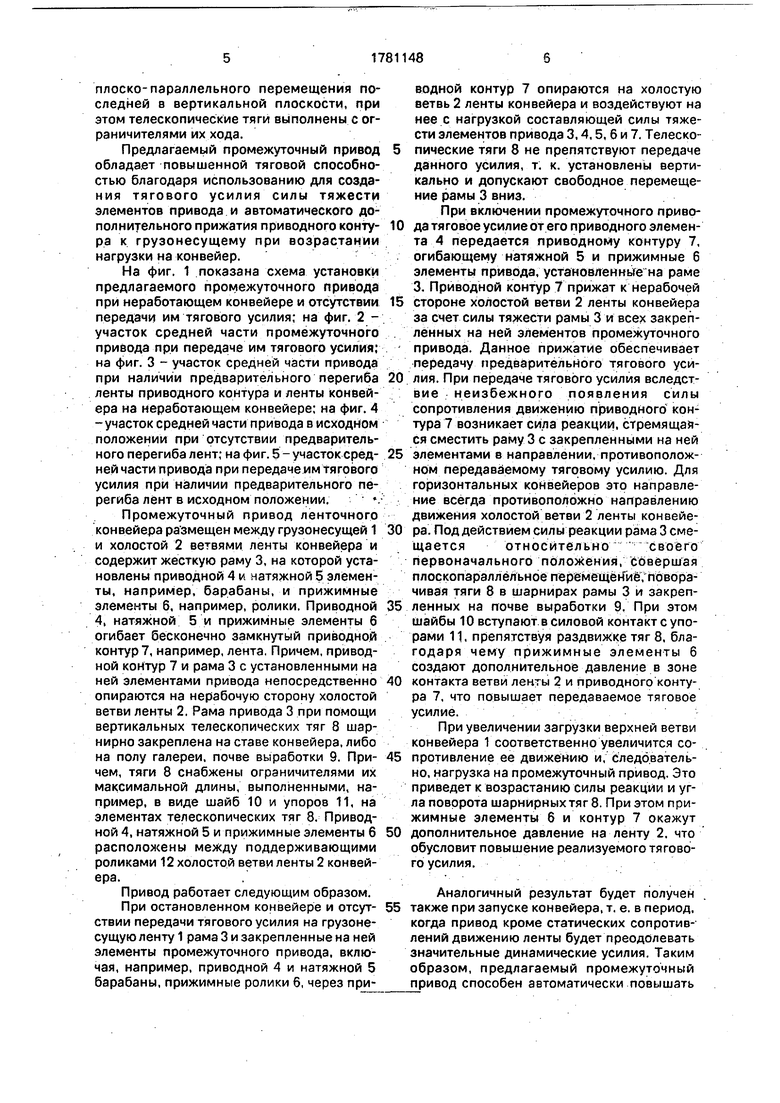
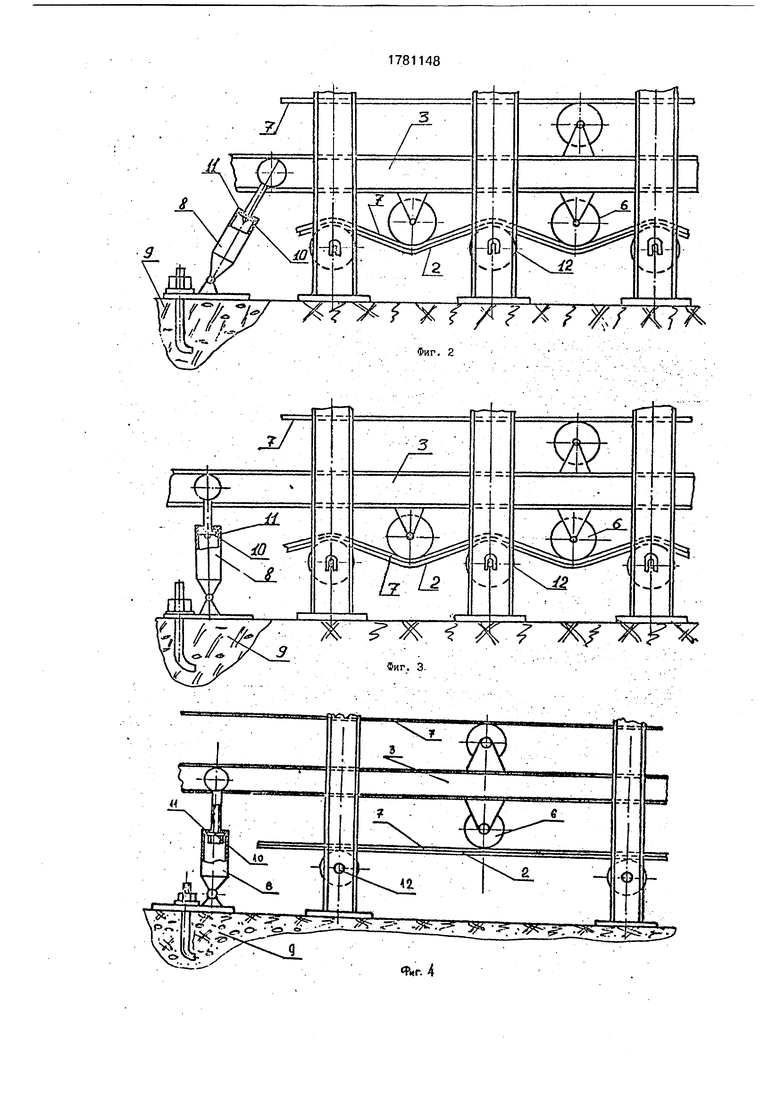
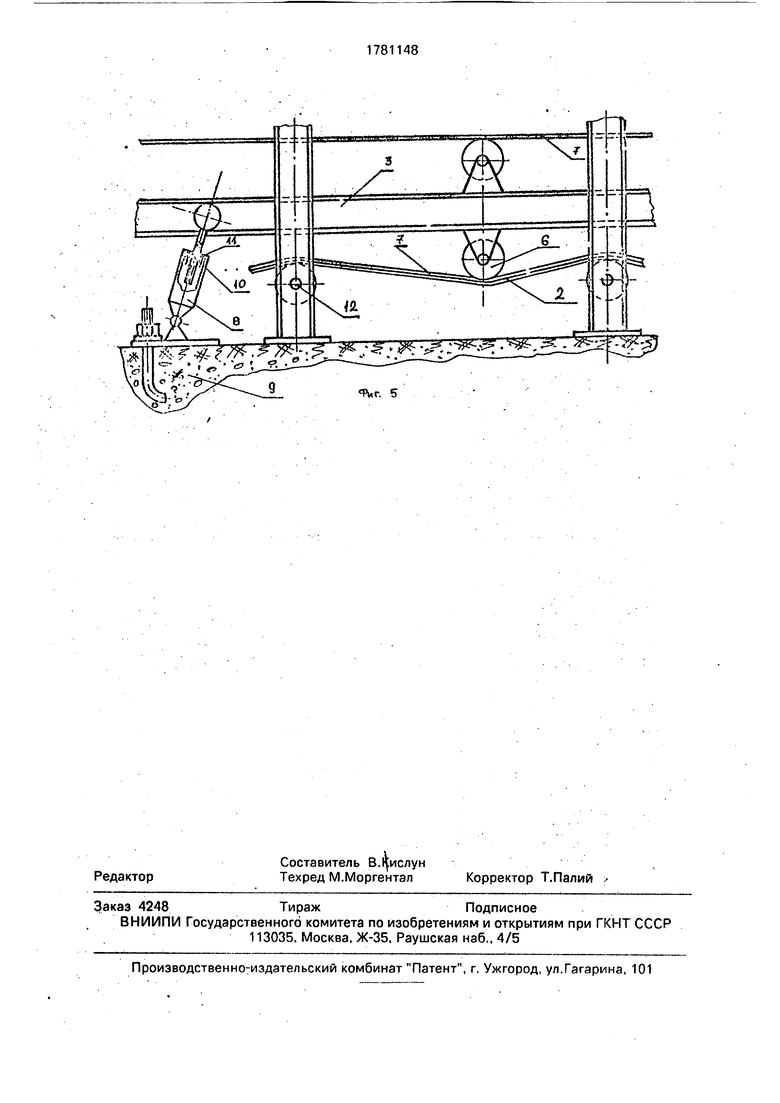
На фиг. 1 показана схема установки предлагаемого промежуточного привода при неработающем конвейере и отсутствии передачи им тягового усилия; на фиг. 2 - участок средней части промежуточного привода при передаче им тягового усилия; на фиг. 3 - участок средней части привода при наличии предварительного перегиба ленты приводного контура и ленты конвейера на неработающем конвейере; на фиг. 4 -участок средней части привода в исходном положении при отсутствии предварительного перегиба лент; на фиг. 5 - участок средней части привода при передаче им тягового усилия при наличии предварительного перегиба лент в исходном положении.
Промежуточный привод ленточного конвейера размещен между грузонесущей 1 и холостой 2 ветвями ленты конвейера и содержит жесткую раму 3, на которой установлены приводной 4 и натяжной 5 элементы, например, барабаны, и прижимные элементы б, например, ролики. Приводной 4, натяжной 5 и прижимные элементы б огибает бесконечно замкнутый приводной контур, например, лента. Причем, приводной контур 7 и рама 3 с установленными на ней элементами привода непосредственно опираются на нерабочую сторону холостой ветви ленты 2. Рама привода 3 при помощи вертикальных телескопических тяг 8 шар- нирно закреплена на ставе конвейера, либо на полу галереи, почве выработки 9. Причем, тяги 8 снабжены ограничителями их максимальной длины, выполненным например, в виде шайб 10 и упоров 11, на элементах телескопических тяг 8. Приводной 4, натяжной 5 и прижимные элементы 6 расположены между поддерживающими роликами 12 холостой ветви ленты 2 конвейера.
Привод работает следующим образом.
При остановленном конвейере и отсутствии передачи тягового усилия на грузоне- сущую ленту 1 рама 3 и закрепленные на ней элементы промежуточного привода, включая, например, приводной 4 и натяжной 5 барабаны, прижимные ролики 6, через приводной контур 7 опираются на холостую ветвь 2 ленты конвейера и воздействуют на нее с нагрузкой составляющей силы тяжести элементов привода 3,4,5, 6 и 7. Телеско- 5 пические тяги 8 не препятствуют передаче данного усилия, т. к. установлены вертикально и допускают свободное перемещение рамы 3 вниз.
При включении промежуточного приво0 да тяговое усилие от его приводного элемента 4 передается приводному контуру 7, огибающему натяжной 5 и прижимные 6 элементы привода, установленные на раме 3. Приводной контур 7 прижат к нерабочей
5 стороне холостой ветви 2 ленты конвейера за счет силы тяжести рамы 3 и всех закрепленных на ней элементов промежуточного привода. Данное прижатие обеспечивает передачу предварительного тягового уси0 лия. При передаче тягового усилия вследствие неизбежного появления силы сопротивления движению приводного контура 7 возникает сила реакции, стремящаяся сместить раму 3 с закрепленными на ней
5 элементами в направлении, противоположном передаваемому тяговому усилию. Для горизонтальных конвейеров это направление всегда противоположно направлению движения холостой ветви 2 ленты конвейе0 ра. Под действием силы реакции рама 3 смещается относительно своего первоначального положения, совершая плоскопараллельное перемещение, поворачивая тяги 8 в шарнирах рамы 3 и закреп5 ленных на почве выработки 9. При этом шайбы 10 вступают в силовой контакт с упорами 11, препятствуя раздвижке тяг 8, благодаря чему прижимные элементы 6 создают дополнительное давление в зоне
0 контакта ветви ленты 2 и приводного контура 7, что повышает передаваемое тяговое усилие.
При увеличении загрузки верхней ветви конвейера 1 соответственно увеличится со5 противление ее движению и, следовательно, нагрузка на промежуточный привод. Это приведет к возрастанию силы реакции и угла поворота шарнирных тяг 8. При этом прижимные элементы б и контур 7 окажут
0 дополнительное давление на ленту 2, что обусловит повышение реализуемого тягового усилия.
Аналогичный результат будет получен 5 также при запуске конвейера, т. е. в период, когда привод кроме статических сопротивлений движению ленты будет преодолевать значительные динамические усилия. Таким образом, предлагаемый промежуточный привод способен автоматически повышать
передаваемое тяговое усилие в период пуска конвейера.
При снижении загрузки верхней ветви 1 сила реакции, воздействующая на привод, упадет и рама 3 привода с закрепленными на ней элементами и тяги 8 под воздействием сил упругости и натяжения ветви ленты 2 и контура 7 совершат обратное движение, занимая положение соответствующее передаваемому тяговому усилию.
При отключении конвейера подвижные элементы промежуточного привода займут исходное положение.
Следует отметить, что расположение приводного 4, натяжного 5 и прижимных б элементов промежуточного привода между поддерживающими роликами 12 холостой ветви ленты 2 обеспечивают беспрепятственную возможность плоскопзраллёльного перемещения рамы 3.
Кроме того, регулировка максимальной длины тяг 8 в сторону ее уменьшения в исходном положении позволяет повысить значение предварительного тягового усилия, передаваемого приводом, за счет дополнительного перегиба ленты 2 и контура 7 между прижимными элементами привода 6 и поддерживающими роликами 12. В этом случае нормальное давление в зоне контакта ленты 2 и контура 7 а, следовательно, и передаваемое тяговое усилие, будет увеличено за счет равнодействующих усилий их натяжений в местах перегиба на прижимных элементах 6 и роликах 12 (см. фиг. 5).
В остальном работа привода в различных режимах эксплуатации конвейера остается прежней.
Таким образом, предлагаемый промежуточный привод обладает повышенной тяговой способностью за счет автоматического регулирования нормалького давления в зоне контакта грузонесуще- го и приводного контуров.
Расчеты показывают, что, например, применительно к конвейеру КЛМК-1, 2 Донецкого машиностроительного завода им.
ЛКУ, промежуточный привод предлагаемой конструкции мощностью 110 кВт, будет иметь длину на 52 % меньше базового, в качестве которого принят ленточный фрикционный привод нижней ветви конструкции
ВНИИПТМаш, ввиду повышения тяговой способности только от использования силы тяжести элементов привода: приводных блоков, рамы с опорами, натяжного барабана.
Формула изобретения
Промежуточный привод ленточного конвейере, включающий приводную ленту, огибающую установленные на раме приводной, натяжной и прижимные элементы с
возможностью взаимодействия с холостой ветвью конвейерной ленты, и размещенные под последней поддерживающие ролики, размещенные со смещением по горизонтали относительно приводного, натяжного и
прижимных элементов, отличающийся тем, что, с целью повышения тяговой способности привода, он снабжен телескопическими тягами, шарнирно соединенными с рамой с возможностью плоско-параллельного перемещения последней в вертикальной плоскости, при этом телескопические тяги выполнены с ограничителями их хода.
| название | год | авторы | номер документа |
|---|---|---|---|
| Промежуточный привод ленточного конвейера | 1983 |
|
SU1098873A1 |
| КРУТОНАКЛОННЫЙ ЛЕНТОЧНЫЙ КОНВЕЙЕР | 2000 |
|
RU2181685C2 |
| Ленточный конвейер | 1983 |
|
SU1077835A1 |
| Промежуточный привод ленточного конвейера | 1985 |
|
SU1247323A1 |
| ПРОМЕЖУТОЧНЫЙ ЛИНЕЙНЫЙ ПРИВОД ЛЕНТОЧНОГО КОНВЕЙЕРА | 2012 |
|
RU2487071C1 |
| НАКЛОННЫЙ ЛЕНТОЧНЫЙ КОНВЕЙЕР | 2000 |
|
RU2201884C2 |
| Ленточный конвейер | 1988 |
|
SU1565789A1 |
| Телескоп кассетный ленточный | 2024 |
|
RU2828312C1 |
| Промежуточный привод ленточногоКОНВЕйЕРА | 1978 |
|
SU829497A1 |
| Ленточный конвейер | 1974 |
|
SU905157A1 |
Использование: конструкции промежуточных приводов лен очных конвейеров. Сущность изобретения: привод ленточного конвейера включает приводную ленту, огибающую установленные на раме приводной, натяжной и прижимные элементы с возможностью взаимодействия с холостой ветвью конвейерной ленты, и размещенные под последней поддерживающие ролики. Последние размещены со смещением относительно приводного, натяжного и прижим- ных элементов. Привод снабжен телескопическими тягами, шарнирно соединенными с рамой с возможностью плоскопараллельного перемещения последней в вертикальной плоскости. Телескопические тяги выполнены с ограничителями их хода, бил. . Ј
Фиг. I
х
Рмг. 5
| Ленточный конвейер | 1986 |
|
SU1382777A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
| Промежуточный привод ленточного конвейера | 1983 |
|
SU1098873A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
