(21)4147373/25-08
(22)20 02 «7
(46) 300590 Ьюл № 20
(71)Гомельский станкостроительный завод им С VI Кирова
(72)В С Игнатович и Г Б Френкдах
(53)621 906-2292(0888) (56) Патент ПИЛ № 4616397, кл В 23 Q М57, 1986
(54)ДВУХЗАХБАТНЛЯ МЕХАНИЧЕСКАЯ РУКЛ
(7) И Н ние опнн ится к машиносгрое нии) ц .,цмин и к ганмк гроению. и мо
/Ы 1 Г)1,11Ь НС ПОТЬЗОВаНО В VI 7 | OHi I lid
антоматичс .он . 1чмы i-uu a Нлмью и Hi мы ж Hi I I ынюние на u Anov.
i IIНчВЛСНО t Н
HOi,iK liIHe На КОГОрОМ ри t
,i,i ч пи IMOAHOI. ГЬЮ OB()|K)Id ОГНО1 И
и п.чо шчю 1ВИЖНО (-т- топленных в гчнови sd/KiiMHbie бки 5 и 6, i HciO/Hi iiHbR ta ными поверхностями 7 и 8.
Для ориентации ИН1 lp WJHTd В )VKC ).
i iyoiptMi,i fi i 1нка Ч закрепленная на бо Koiio.i ii ioi p HOiTH 10 зажимной 5 На основании (акренлен механизм 11 фиксации (бок, корпус 12, в котором выложены расточки Н и 14, заполнен ные рабочей жидкостью и в которых pai
положены поршни 15, 16 и 17 Штоки 18 и 19 взаимодействуют с боковыми поверхностями 10 и 20 зажимных губок Полости расточек 13 и 14 сообщаются через отверстие 21 На штоке поршня 17 жестко закреплен фиксатор 24, размещенный в центральном отверстии втулки 23 Фиксатор 24 установлен с возможностью взаимодействия с центральным сквозным отверстием 26 При смене инструмента механическая рука подается по стрелке А в направлении инструмента, который выщелкивается по стрел ке Б в зажимные губки 5 и 6, раздви- i аи их при том по стрелке В Зажим- |1ы 5 и 6 боковыми поверхностя ми ii) и 20 взаимодействуют со штоками 18 и N, I tpi мешая их по стрелке Г Рабочая жидким, ;;ри том вытесняется поршнями 15 и 1Ь из расточки 13 через отверстие 21 в расточку 14 и перемещает поршень 17 по стрелке Д, сжимая пружину 22. Фикипор 24 перемещается по стрелке Е и вхошг в отверстие 26 вала 1 Как только инструмент займет свое место на захватных поверхностях 7 и 8 зажимных губок 5 и 6, гик ie жие возвращаются по стрелке Ж под действием усилия пружины 22 в исходное положение Фиксатор 24 перемешается по стрелке 3 и выходит из от вере гия 26 вала 1 2 ил
(Л
ел
О)
J
00
ел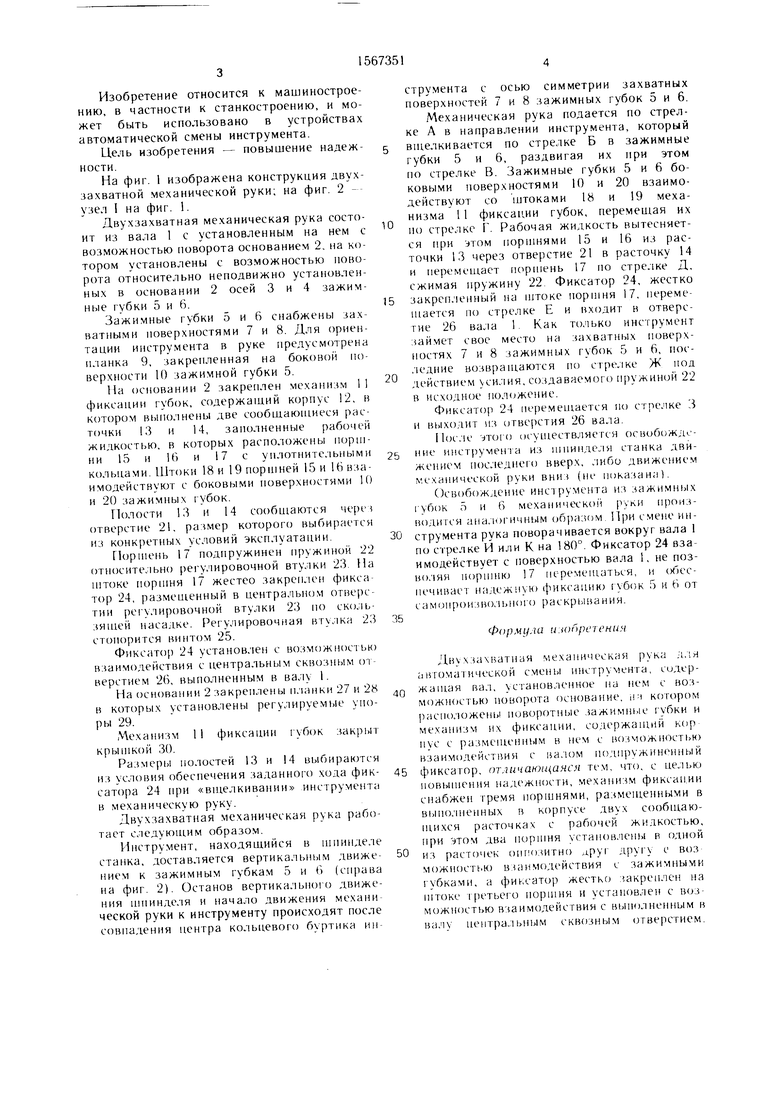
| название | год | авторы | номер документа |
|---|---|---|---|
| УСТРОЙСТВО ДЛЯ РЕЗКИ ТОНКОСТЕННЫХ ТРУБ | 1991 |
|
RU2010687C1 |
| Устройство для резки тонкостенных труб | 1989 |
|
SU1687381A2 |
| Захватное устройство | 1986 |
|
SU1473943A1 |
| Револьверная головка | 1988 |
|
SU1696158A1 |
| Многооперационный станок | 1984 |
|
SU1212753A1 |
| Устройство для автоматической смены инструмента | 1982 |
|
SU1074700A1 |
| Захватное устройство | 1991 |
|
SU1816688A1 |
| Захват промышленного робота | 1987 |
|
SU1509247A1 |
| Схват промышленного робота | 1984 |
|
SU1250452A1 |
| Устройство для автоматической передачи инструмента | 1976 |
|
SU656803A1 |
Изобретение относится к машиностроению, в частности к станкостроению, и может быть использовано в устройствах автоматической смены инструмента. Целью изобретения является повышение надежности. На валу 1 установлено с возможностью поворота основание, на котором размещены с возможностью поворота относительно неподвижно установленных в основании осей 3 и 4 зажимные губки 5 и 6, снабженные захватными поверхностями 7 и 8. Для ориентации инструмента в руке предусмотрена планка 9, закрепленная на боковой поверхности 10 зажимной губки 5. На основании закреплен механизм 11 фиксации губок, содержащий 12, в котором выполнены расточки 13 и 14, заполненные рабочей жидкостью и в которых расположены поршни 15, 16 и 17. Штоки 18 и 19 взаимодействуют с боковыми поверхностями 10 и 20 зажимных губок. Полости расточек 13 и 14 сообщаются через отверстие 21. На штоке поршня 17 жестко закреплен фиксатор 24, размещенный в центральном отверстии втулки 23. Фиксатор 24 установлен с возможностью взаимодействия с центральным сквозным отверстием 26. При смене инструмента механическая рука подается по стрелке А в направлении инструмента, который выщелкивается по стрелке Б в зажимные губки 5 и 6, раздвигая их при этом по стрелке В. Зажимные губки 5 и 6 боковыми поверхностями 10 и 20 взаимодействуют со штоками 18 и 19, перемещая их по стрелке Г. Рабочая жидкость при этом вытесняется поршнями 15 и 16 из расточки 13 через отверстие 21 в расточку 14 и перемещает поршень 17 по стрелке Д, сжимая пружину 22. Фиксатор 24 перемещается по стрелке Е и входит в отверстие 26 вала 1. Как только инструмент займет свое место на захватных поверхностях 7 и 8 зажимных губок 5 и 6, последние возвращаются по стрелке Ж под действием усилия пружины 22 в исходное положение. Фиксатор 24 перемещается по стрелке 3 и выходит из отверстия 26 вала 1. 2 ил.
-L--5
1
1
Изобретение относится к машиностроению, в частности к станкостроению, и может быть использовано в устройствах автоматической смены инструмента.
Цель изобретения - повышение надежности.
На фиг. 1 изображена конструкция двух- захватной механической руки; на фиг. 2 -- узел 1 на фиг. 1.
Двухзахватная механическая рука состоит из вала 1 с установленным на нем с возможностью поворота основанием 2, на котором установлены с возможностью поворота относительно неподвижно установленных в основании 2 осей 3 и 4 зажимные губки 5 и 6.
Зажимные губки 5 и 6 снабжены захватными поверхностями 7 и 8. Для ориентации инструмента в руке предусмотрена планка 9, закрепленная на боковой поверхности 10 зажимной губки 5.
На основании 2 закреплен механизм 1 1 фиксации губок, содержащий корпус 12, в котором выполнены две сообщающиеся расточки 13 и 14, заполненные рабочей жидкостью, в которых расположены поршни 15 и 16 и 17 с уплотнительными кольцами. Штоки 18 и 19 поршней 15 и 16 взаимодействуют с боковыми поверхностями 10 и 20 зажимных губок.
Полости 13 и 14 сообщаются мере отверстие 21, рашер которого выбирается из конкретных условий эксплуатации.
Поршень 17 подпружинен пружиной 22 относительно регулировочной втулки 23 На штоке поршня 17 жестео закреплен фикса тор 24, размешенный в центральном отверстии регулировочной втулки 23 по скользящей насадке. Регулировочная втулка 23 стопорится винтом 25.
Фиксатор 24 установлен с возможностью взаимодействия с центральным сквозным отверстием 26, выполненным в валу 1.
На основании 2 закреплены планки 27 и 28 в которых установлены регулируемые упоры 29.
Механизм 11 фиксации губок закрыт крышкой 30.
Размеры полостей 13 и 14 выбираются из условия обеспечения заданного хода фиксатора 24 при «вщелкивании инструмента в механическую руку.
Двухзахватная механическая рука работает следующим образом.
Инструмент, находящийся в шпинделе станка, доставляется вертикальным движением к зажимным губкам 5 и 6 (справа на фиг. 2). Останов вертикального движения шпинделя и начало движения механической руки к инструменту происходят после совпадения центра кольцевого буртика ин0
струмента с осью симметрии захватных поверхностей 7 и 8 зажимных губок 5 и 6. Механическая рука подается по стрелке А в направлении инструмента, который
вщелкивается по стрелке Б в зажимные губки 5 и 6, раздвигая их при этом по стрелке В. Зажимные губки 5 и 6 боковыми поверхностями 10 и 20 взаимодействуют со Штоками 18 и 19 механизма 11 фиксации губок, перемещая их но стрелке Г. Рабочая жидкость вытесняется при этом поршнями 15 и 16 из расточки 13 через отверстие 21 в расточку 14 и перемещает поршень 17 по стрелке Д, сжимая пружину 22 Фиксатор 24, жестко
закрепленный на штоке поршня 17, перемещается по стрелке Е и входит н отверстие 26 вала 1 Как только инструмент займет свое место на захватных поверхностях 7 и 8 зажимных губок 5 и 6, последние возвращаются по стрелке Ж под действием усилия, создаваемого пружиной 22 в исходное положение.
Фиксатор 24 перемешается по стрелке 3 и выходит из отверстия 26 вала.
После этом) осуществляется огвобожди5 ние инструмента из шпинделя станка движением последнею вверх, либо движением механической руки вниз (не покачана).
Освобождение инструмента из зажимных i убок 5 и 6 механической производится аналогичным образом При смене ин0 струмента рука поворачивается вокруг вала 1 по стрелке И или К на 180°. Фиксатор 24 взаимодействует с поверхностью вала 1, не позволяя поршню 17 перемещаться, и обеспечивает надежную фиксацию бок 5 и 6 от самоирои нюдьного раскрывания.
5
Формула и юЪрет ения
Двухзахватная механическая рука длн автоматической смены инструмента, содер0
0
0
жатая вал, становленное на нем с возможностью поворота основание, нч котором расположены поворотные зажимные губки и механизм их фиксации, содержащий кор пус с размещенным в нем с возможностью взаимодействия с валом подпружиненный 5 фиксатор, отличающаяся тем, что, с целью повышения надежности, механизм фиксации снабжен гремя поршнями, размещенными в выполненных в корпусе двух сообщающихся расточках с рабочей жидкостью, при этом два поршня установлены R одной
из расточек оппозигно дру| другу с воз можностью взаимодействия с зажимными губками, а фиксатор жестко закреплен на штоке третьего поршня и установлен с возможностью взаимодействия с выполненным в валу центральным сквозным отверстием.
4 6
