35
Я
СП
О
;о to ;
б«
65
Изобретение относится к технологическим средствам машиностроения и предназначено для использования в качестве захватного устройства в промышленных роботах и манипуляторах.
Цель изобретения - расширение эксплуатационных возможностей захвата за счет обеспечения возможности поворота деталей относительно оси, перпендикулярной продольной оси детали, и упрощения переЗажимная рейка 6 содержит кронштейн- 30 и приспособление 31 для переналадки на детали различных типоразмеров, в состав которого входят гайки 32, в пазах 33 с которых установлена с возможностью возвратно-поступательного перемещения зажимная рейка 6. Гайки 32 установлены с возможностью поворота на резьбовых концах втулок 34, жестко закрепленных на корпусе 1. Втулки 34 выполнены с пазами
наладки захвата на детали различных типо- - 35, оси которых параллельны продольной
размеров.оси приводной рейки 5, взаи-модействующими
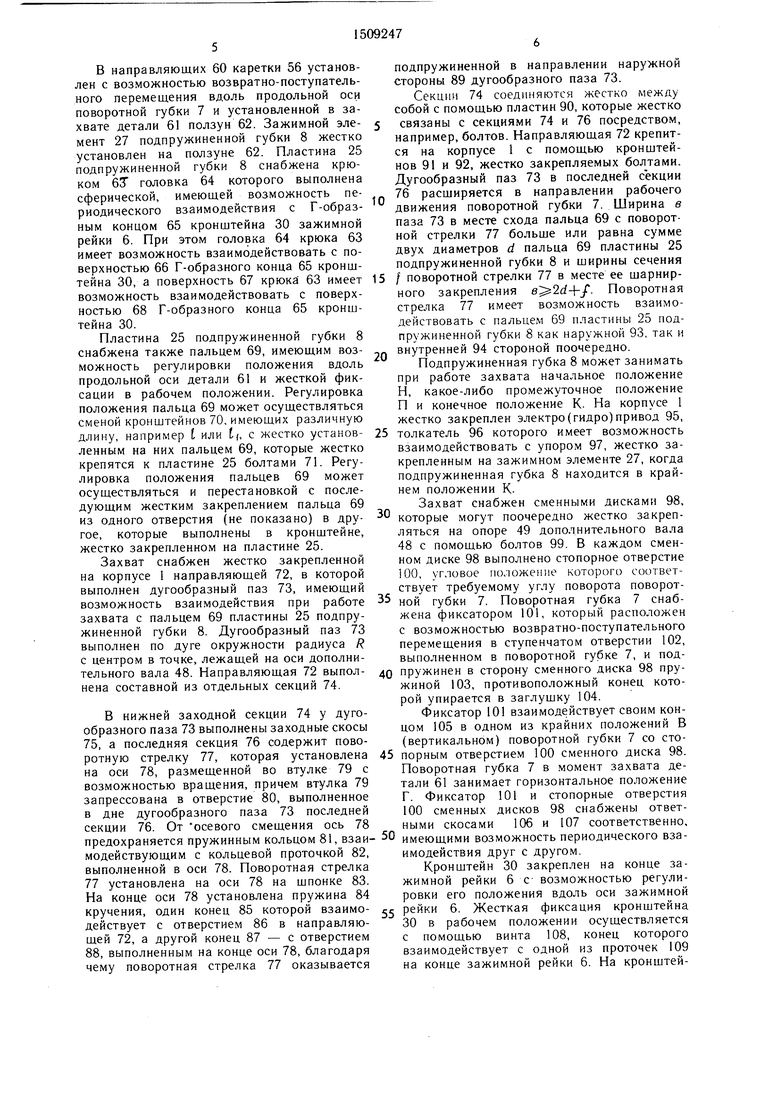
На фиг. I изображен захват, общий вид;с поверхностью 36 скольжения зажимной
на фиг. 2 - вид А на фиг. 1; на фиг. 3 - сече-рейки 6. Гайки 32 снабжены фиксаторами
ние Б-Б на фиг. 1; на фиг. 4 - сечение В-В37 рабочего положения, выполненными в
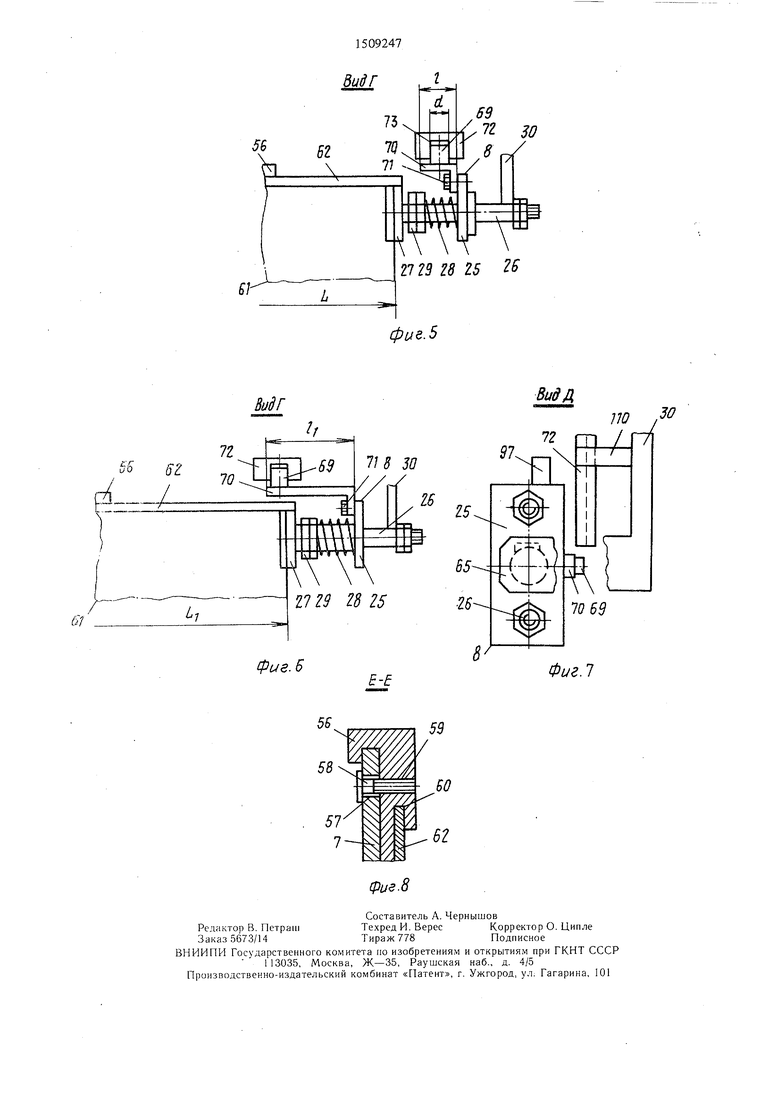
на фиг. 1; На фиг. 5 - вид Г на фиг. 2; на виде пластинчатых пружин 38, взаимодейфиг. 6 - то же, в захват зажата детальствующих одними концами с гнездами 39
другого типоразмера; на фиг. 7 - вид Д нав боковых гранях 40 гаек 32. Другие концы
фиг. 2; на фиг. 8 - сечение Е-Е на фиг. 2.пластинчатых пружин 38 жестко закрепЗахват содержит корпус- 1, в которомлены в бобышках 41 корпуса 1. В рабона валу 2 установлены на шпонке зубчатыечем положении оси пазов 33 гаек 32
колеса 3 и 4, взаимодействующие соот-20 перпендикулярны осям пазов 35 втулок
ветственно с приводной 5 и зажимной 634. При этом пазы 33 гаек 32 взаимодейрейками, поворотную губку 7 и подпружи-ствуют с поверхностью 36 скольжения заненную губку 8.жимной рейки 6. Рейка 6 снабжена проПриводная рейка 5 установлена с воз-дольными пазами 42, взаимодействующими
можностью возвратно-поступательного пере-25 со шпонками 43, установленными в пазах
мещения во втулках 9, закрепленных на35 втулок 34.
корпусе 1. Один конец приводной рейки 5Для предотвращения самопроизвольного связан с электро(гидро)приводом (не пока-проворачивания вала 2 с зубчатыми коле- зан), а противоположный конец снабженсами 3 и 4 при выходе зубьев привод- пазами 10, в которых размещены с возмож-- ной рейки 5 из зацепления с зубчатым ностью возвратно-поступательного переме-ЗО колесом 3 торец 44 вала 2 имеет возмож- щения пальцы 11. Одни концы 12 пальцевность взаимодействовать со штоком 45 тор- 11 взаимодействуют с зубчатым колесом 13,мозного-устройства 46, жестко закреплен- посаженным по шпонке 14 на валу 15,ного на корпусе 1 и снабженного электрорасположенном с возможностью вращения(гидро приводом (не показан), в опоре 16, жестко закрепленной на кор-Поворотная губка 7 жестко посажена по пусе 1. Торец 17 вала 15 имеет возмож-35 шпонке 47 на дополнительном валу 48, ность взаимодействовать со штоком 18 тор-который размешен с возможностью враще- мозного устройства 19, жестко закреплен-ния в опоре 49, жестко закрепленной на ного на опоре 16 вала 15 и снабженногокорпусе 1 с помощью кронштейна 50. По- электро(гидро) приводом. Другие концы 20воротная губка 7 снабжена жестко установ- пальцев 1 I имеют возможность взаимодей-.„ ленным на ней Г-образным упором 51 и стопо- ствовать с копиром 21, размещенным с воз-рится от смещения вдоль оси дополнитель- можностью возвратно-поступательного пере-ного вала 48 посредством винта 52. До- мещения своим ползуном 22 в кронштейнеполнительный вал 48 расположен перпен- 23, жестко закрепленном на корпусе 1. Пол-дикулярно оси вала 15 зубчатого колеса 13 зун 22 копира 2-1 жестко связан с электро- и кинематически связан с ним посредством (гидро)приводом перемещения (не пока-45 конической зубчатой передачи 53, зубчатые зан). Пальцы 11 подпружинены пружинамиколеса 54 и 55 которой жестко посажены
на соответствующих валах 48 и 15.
Поворотная губка 7 снабжена также кареткой 56, размещенной на ней с возможностью возвратно-поступательного перемевание (пластину) 25, в котором располо-50 щения вдоль продольной оси поворотной
жены с возможностью возвратно-поступа-губки 7. Кроме того, вдоль продольной
тельного перемещения стержни 26, на концахоси поворотной губки 7 по обе стороны
которых жестко установлен зажимной эле-от оси выполнены два ряда сквозных отверсмент 27. Основание 25 и зажимной элементтий 57. Фиксация каретки 56 в рабочем по27 под-пружинены в сторону друг от другаложении осуществляется с помощью винтов
пружинами 28, установленными на стержнях 58, пропущенных в соответствующие парные
24 в сторону копира 21. Вал 15 установлен параллельно зажимной рейке 6.
Подпружиненная губка 8 содержит осно26. При этом стержни 26 снабжены регулировочными гайками 29, служащими для регулирования усилия пружин 28.
отверстия 57 поворотной губки 7 и завернутых в резьбовые отверстия 59, выполненные в каретке 56.
Зажимная рейка 6 содержит кронштейн- 30 и приспособление 31 для переналадки на детали различных типоразмеров, в состав которого входят гайки 32, в пазах 33 которых установлена с возможностью возвратно-поступательного перемещения зажимная рейка 6. Гайки 32 установлены с возможностью поворота на резьбовых концах втулок 34, жестко закрепленных на корпусе 1. Втулки 34 выполнены с пазами
35, оси которых параллельны продольной
отверстия 57 поворотной губки 7 и завернутых в резьбовые отверстия 59, выполненные в каретке 56.
В направляющих 60 каретки 56 установлен с возможностью возвратно-поступательного перемещения вдоль продольной оси поворотной губки 7 и установленной в захвате детали 61 ползун 62. Зажимной элемент 27 подпружиненной губки 8 жестко установлен на ползуне 62. Пластина 25 подпружиненной губки 8 снабжена крюком бТ головка 64 которого выполнена сферической, имеющей возможность периодического взаимодействия с Г-образ- ным концом 65 кронщтейна 30 зажимной рейки 6. При этом головка 64 крюка 63 имеет возможность взаимодействовать с поверхностью 66 Г-образного конца 65 кронщтейна 30, а поверхность 67 крюка 63 имеет возможность взаимодействовать с поверхностью 68 Г-образного конца 65 кронщтейна 30.
Пластина 25 подпружиненной губки 8 снабжена также пальцем 69, имеющим возможность регулировки положения вдоль продольной оси детали 61 и жесткой фиксации в рабочем положении. Регулировка положения пальца 69 может осуществляться сменой кронщтейнов 70, имеющих различную длину, например или If, с жестко установленным на них пальцем 69, которые жестко крепятся к пластине 25 болтами 71. Регулировка положения пальцев 69 может осуществляться и перестановкой с последующим жестким закреплением пальца 69 из одного отверстия (не показано) в другое, которые выполнены в кронщтейне, жестко закрепленном на пластине 25.
Захват снабжен жестко закрепленной на корпусе 1 направляющей 72, в которой выполнен дугообразный паз 73, имеющий возможность взаимодействия при работе захвата с пальцем 69 пластины 25 подпружиненной губки 8. Дугообразный паз 73 выполнен по дуге окружности радиуса / с центром в точке, лежащей на оси дополнительного вала 48. Направляющая 72 выполнена составной из отдельных секций 74.
В нижней заходной секции 74 у дугообразного паза 73 выполнены заходные скосы 75, а последняя секция 76 содержит поворотную стрелку 77, которая установлена на оси 78, размещенной во втулке 79 с возможностью вращения, причем втулка 79 запрессована в отверстие 80, выполненное в дне дугообразного паза 73 последней секции 76. От осевого смещения ось 78 предохраняется пружинным кольцом 81, взаимодействующим с кольцевой проточкой 82, выполненной в оси 78. Поворотная стрелка 77 установлена на оси 78 на шпонке 83. На конце оси 78 установлена пружина 84 кручения, один конец 85 которой взаимодействует с отверстием 86 в направляющей 72, а другой конец 87 - с отверстием 88, выполненным на конце оси 78, благодаря чему поворотная стрелка 77 оказывается
0
5
0
5
0
5
0
5
0
5
подпружиненной в направлении наружной стороны 89 дугообразного паза 73.
Секции 74 соединяются жестко между собой с помощью пластин 90, которые жестко связаны с секциями 74 и 76 посредством, например, болтов. Направляющая 72 крепится на корпусе 1 с помощью кронщтейнов 91 и 92, жестко закрепляемых болтами. Дугообразный паз 73 в последней секции 76 расщиряется в направлении рабочего движения поворотной губки 7. Ширина в паза 73 в месте схода пальца 69 с поворотной стрелки 77 больще или равна сумме двух диаметров d пальца 69 пластины 25 подпружиненной губки 8 и щирины сечения / поворотной стрелки 77 в месте ее щарнир- ного закрепления . Поворотная стрелка 77 имеет возможность взаимодействовать с пальцем 69 пластины 25 подпружиненной губки 8 как наружной 93. так и внутренней 94 стороной поочередно.
Подпружиненная губка 8 может занимать при работе захвата начальное положение И, какое-либо промежуточное положение П и конечное положение К. На корпусе 1 жестко закреплен электро(гидро)привод 95, толкатель 96 которого имеет возможность взаимодействовать с упором 97, жестко закрепленным на зажимном элементе 27, когда подпружиненная губка 8 находится в крайнем положении К.
Захват снабжен сменными дисками 98, которые могут поочередно жестко закрепляться на опоре 49 дополнительного вала 48 с помощью болтов 99. В каждом сменном диске 98 выполнено стопорное отверстие 100, угловое положение которого соответствует требуемому углу поворота поворотной губки 7. Поворотная губка 7 снабжена фиксатором 101, который расположен с возможностью возвратно-поступательного перемещения в ступенчатом отверстии 102, выполненном в поворотной губке 7, и подпружинен в сторону сменного диска 98 пружиной 103, противоположный конец которой упирается в заглущку 104.
Фиксатор 101 взаимодействует своим концом 105 в одном из крайних положений В (вертикальном) поворотной губки 7 со стопорным отверстием 100 сменного диска 98. Поворотная губка 7 в момент захвата детали 61 занимает горизонтальное положение Г. Фиксатор 101 и стопорные отверстия 100 сменных дисков 98 снабжены ответными скосами 106 и 107 соответственно, имеющими возможность периодического взаимодействия друг с другом.
Кронщтейн 30 закреплен на конце зажимной рейки 6 с возможностью регулировки его положения вдоль оси зажимной рейки 6. Жесткая фиксация кронштейна 30 в рабочем положении осуществляется с помощью винта 108, конец которого взаимодействует с одной из проточек 109 на конце зажимной рейки 6. На кронштейзажимной элемент 27 подпружиненной губки 8, находящиеся в исходном перед работой положении, были установлены против соответствующих торцов детали 61. Затем 5 при перемещении приводной рейки 5 вверх взаимодействующее с ее зубьями зубчатое колесо 3 начинает вращать вал 2, а вместе с ним и зубчатое колесо 4. Зажимная рейка 6 начинает смещаться влево вместе с крон- щтейном 30, который, взаимодействуя- поне 30 также жестко закреплен упор 110, который имеет возможность взаимодействовать в одном из крайних положений за- рейки 6 с конечным выключателем 111, жестко закрепленным на направляющей 72.
Захват работает следующим образом.
Перед началом работы производится регулировка зажимной рейки 6 и подпружиненной губки 8 на соответствующий типо-.....ч.,„ , ,., „,.,„„«..,„,„ ..
размер детали 61. Для этого гайки 32 пово- верхностью 66 своего Г-образного конца 65 рачивают на угол 90° до совмещения па- со сферической головкой 64 крюка 63, пере- зов 33 с пазами 35 во втулках 34. Пружи- мещает подпружиненную губку 8 в сторону мы 38 при этом выходят из гнезд 39 на зажимаемой детали 61. Происходит зажим боковых гранях 40 гаек 32. Смещением детали 61. Пружины 28 подпружиненной вдоль осей совмещенных пазов 33 и 35 за- 15 губки 8 при этом сжимаются, обеспе- жимной рейки 6 выводят ее зубья из зацепления с зубчатым колесом 4 и перемещением вдоль своей продольной оси легко устанавливают зажи.мную рейку 6 на требуемый габаритный размер захватываемой детал и 61.
Затем отворачивают винты 58, перемещают каретку 56 в соответствующее положение и, установив -винты 58 в соот20
ветствующие отверстия 57, выполненные в
чивая заранее заданное усилие зажима детали 61.
После этого пускорегулирующая аппаратура (не показана) отключает привод перемещения приводной рейки 5. Рейка 5 устанавливается в крайнем верхнем положении, при этом зубья приводной рейки 5 выходят из .зацепления с зубчатым колесом 3. Чтобы не произошло при этом самопроизвольного поворота зубчатых ко- поворотной губке 7, затягивают винты 58 в 25 3 и 4 перемещения зажимной рейки резьбоЕ5ых отверстиях 59 каретки 56, жест-б, что может привести к разжатию детако фиксируя ее в рабочем положении. Бо-ли 61, включается электро(гидро) привод
лее точную регулировку зажимной рейки 6 тормозного устройства 46, закрепленного на и подпружиненной губки 8 осуществляют,корпусе 1, шток 45 которого, прижимаясь к
оснобождая винт 108 и смещая кронщтейн торцу 44 вала 2, фиксирует вал 2 от про- 30 вдоль оси зажимной рейки 6. Уста- 30 ворота. При этом палец 69 пластины 25 новив кронштейн 30 в соответствующее положение, затягивают винт 108, который, взаимодействуя своим концом с одной из проточек 109 зажимной рейки 6, жестко фиксирует кронщтейн 30 на конце зажимной рейки 6 в рабочем положении.
При повороте гаек 32 на угол 90° в обратном направлении зажимная рейка 6
подпружиненной губки 8 оказывается расположен перед заходными скосами 75 дугообразного паза 73 направляющей 72. Далее деталь 61, зажатая между подпружиненной 8 и поворотной 7 губками, перемещается 35 на следующую позицию.
Кроме того, совпадение положения пальца 69 подпружиненной губки 8 и заходных скосов 75 дугообразного паза 73 обеспечивается предварительной регулировкой положения пальца 69 в зависимости от длины детали L или L. Это достигается или перестановкой пальца 69 в соответствующее отверстие (не показано) кронштейна 70 и жесткой фиксацией пальца 69 в этом положении, или в зависимости от призажи.ма детали 61 за счет изменения на- 45 нятой конструкции сменой кронштейнов 70 чального усилия сжатия пружин 28. При- кронщтейн подходящей длины / или /,,
водная рейка 5 в процессе этих регулировок находится в крайнем нижнем положении и входит в зацепление с зубчатым колесом 3, а пальцы 11 под действием
вновь вводится в зацепление с зубчатым колесом 4, а концы пружин 38 входят в гнезда 39 на боковых гранях 40 гаек 32, фиксируя их от самопроизвольного прово- рота.
Вращением гаек 29 на стержнях 26 подпружиненной губки 8 регулируют усилие
40
на котором жестко установлен палец 69. В процессе перемещения или непосредственно перед установкой детали 61 на новую позицию срабатывает пускорегулипружин 24 втянуты в пазы 10 и не вы- аппаратура, отключающая тормоз- ступа ют из них за плоскость рейки 5. устройство 19, шток 18 которого от- В процессе этих регулировок Г-образ- ходит от торца 17 вала 15, растормажи- ный конец 65 кронштейна 30 находится его, и включающая электро(гидро)- постоянном зацеплении с захватным крю-привод перемещения ползуна 22 копира 21 в ком 63, жестко закрепленным на пласти- 55 Роиштейне 23. Копир 21 при этом смене 25 подпружиненной губки 8. щается в крайнее положение вправо. Далее
приводная рейка 5 начинает перемещаться вниз. При этом сферические головки
После этого захват подводится к перемещаемой детали 61 таким образом, чтобы Г-образн 1Й упор 51 поворотной губки 7 и
концов 20 пальцев 11 приводной рейки 5
зажимной элемент 27 подпружиненной губки 8, находящиеся в исходном перед работой положении, были установлены против соответствующих торцов детали 61. Затем при перемещении приводной рейки 5 вверх взаимодействующее с ее зубьями зубчатое колесо 3 начинает вращать вал 2, а вместе с ним и зубчатое колесо 4. Зажимная рейка 6 начинает смещаться влево вместе с крон- щтейном 30, который, взаимодействуя- по.....ч.,„ , ,., „,.,„„«..,„,„ ..
верхностью 66 своего Г-образного конца 65 со сферической головкой 64 крюка 63, пере- мещает подпружиненную губку 8 в сторону зажимаемой детали 61. Происходит зажим детали 61. Пружины 28 подпружиненной губки 8 при этом сжимаются, обеспе-
концов 20 пальцев 11 приводной рейки 5
поочередно взаимодействуют с копиром 21, смещаясь в сторону зубчатого колеса 13 и входят в зацепление с его зубьями. Пружины 24 при этом сжимаются.
При дальнейшем перемещении рейки 5 вниз происходит поворот зубчатого колеса 13, жестко закрепленного на валу 15. При этом коническое зубчатое колесо 55, жестко закрепленное на этом же валу 15, начинает вращать взаимодействующее с ним зубчатое колесо 54, жестко установленное на валу 48. В результате вместе с валом 48 начинает поворачиваться и жестко закрепленная на нем поворотная губка 7 с подпружиненной губкой 8 и зажатая между ними деталь 61. При этом палец 69 подпружиненной губки 8, взаимодействуя с одним из скосов 75 дугообразного паза 73, заходит в паз 73, взаимодействуя в даль- нейщем с его стенками. Одновременно с этим, когда палец 69 вошел в паз 73, крюк 63 подпружиненной губки 8 полностью выходит из зацепления с Г-образным концом 65 кронштейна 30. В процессе дальнейшей работы захвата постоянство усилия зажима детали 61 обеспечивается благодаря взаимодействию пальца 69 подпружиненной губки 8 со стенками дугообразного паза 73. Кронштейн 30 зажимной рейки 6 при дальнейшей работе захвата остается неподвижным, поскольку зубчатые колеса 3 и 4, а следовательно, и зажимная рейка 6 зафиксированы от смещения с помощью тормозного устройства 46.
Происходит поворот детали 61 в плоскости, параллельной ее продольной оси. При этом палец 69 подпружиненной губки 8 скользит вдоль дугообразного паза 73 направляющей 72. В конце поворота, когда палец 69 доходит до последней секции 76 направляющей 72, он вступает во взаимодействие с внутренней стороной 94 стрелки 77, которая подпружинена пружиной 84 в направлении наружной стороны 89 дугообразного паза 73. В самом конце поворота, когда деталь 61 находится в вертикальном положении В, фиксатор 101, конец 105 которого в процессе поворота скользит по поверхности сменного диска 98, вступает во взаимодействие концом 105 со стопорным отверстием 100, выполненным в сменном диске 98. Одновременно происходит отключение механизма привода приводной рейки 5, и поворотная губка 7 вместе с деталью 61 оказывается- зафиксированной в вертикальном положении В.
Одновременно с этим при достижении конца расширяюшейся части дугообразного паза 73 палец 69 сходит с поворотной стрелки 77 и пластина 25 подпружиненной губки 8 отжимается под действием пружин 28 вверх до упора пальца 69 в наружную сторону 89 расширяющейся части дугообразного паза 73. Ориентированная в вертикальном положении деталь 61 устанавливается на новую позицию. Но при этом деталь 61 еще остается зажатой с небольшим усилием между поворотной 7 и подпружиненной 8 губками, поскольку противоположные концы пружин 28 прижимают зажимной элемент 27 подпружиненной губки 8 к торцу детали 61.
Когда деталь 61 окажется установленной на новой позиции, включается элек- тро(гидро) привод 95, толкатель 96 которого начинает взаимодействовать с упором 97, жестко закрепленным на зажимном элементе 27 подпружиненной губки 8, отжимая зажимной элемент 27 вверх и освобождая деталь 61 от зажима ее со стороны губок 7
5 н 8. После этого захват отводится от детали 61, установленной на новой позиции. Включается электро(гидро)привод приводной рейки 5, и рейка 5 начинает перемещаться вверх. Пальцы 11 приводной рейки 5 начинают взаимодействовать с копиром
21, вращая зубчатое колесо 13, а следовательно, и поворотную губку 7 с установленной на ней подпружиненной губкой 8 в обратном направлении. При этом благодаря тому, что щирина паза 73 Ь в расширен5 ной его части больше или равна сумме двух диаметров d пальца 69 и ширины сечения / поворотной стрелки 77 в месте ее шарнирного закрепления, палец 69 подпружиненной губки 8 начинает взаимодействовать с наружной стороной 93 поворотной
0 стрелки 77, поворачивая ее к противоположной стороне паза 73 и закручивая при этом пружины 84 кручения. При дальнейшем вращении поворотной губки 7 палец 69 перемещается вдоль дугообразного паза 73. Когда палец 69 сходит с наружной
5 стороны 93 стрелки 77, то последняя под действием пружины 84 возвращается в исходное положение.
При этом следует иметь в виду, что в начальный момент поворота в обратном на0 правлении скос 106 фиксатора 101 поворотной губки 7 входит во взаимодействие с ответным скосом 107 стопорного отверстия 100 сменного диска 98. В результате в начальный момент поворота происходит расфиксация поворотной губки 7 из крайне5 го вертикального положения В.
В конце поворота в обратном направлении поворотная губка 7 вместе с подпружиненной губкой 8 возвращается в исходно горизонтальное положение Г, и в мо0 мент выхода пальца 69 из дугообразного паза 73 захватный крюк 63 пластины 25 подпружиненной губки 8 входит в зацепление с Г-образным концом 65 кронштейна 30. Привод рейки 5 отключается. Срабатывает
г привод тормозного устройства 46. шток 45 которого отходит от торца 44 вала 2 зубчатых колец 3 и 4, растормаживая вал 2. Кроме того, одновременно с этим копир 21 отводится своим приводом в исходное поло11
жение, пальцы 1 1 под действием пружин 24 смещаются влево и выходят из зацепления с зубчатым колесом 13. Одновременно с этим срабатывает привод тормозного устройства 19, прижимающий щток 18 к торцу 17 вала 15, и затормаживающий вал 15, а следовательпо, и вал 48 вместе,с поворотной 7 и иодпружипеннон 8 губками в этом положении.
После этого приводная рейка 5 под действием своего электро(гидро)привода начинает перемещаться вниз (при этом ее пальцы 1 1 уже не взаимодействуют с зубчатым колесом 13) и, когда ее зубья вступают во взаимодействие с зубчатым колесом 3, зажи.мная рейка 5 начинает в результате перемещаться вправо. При этом поверхность 68 Г-образного конца 65 кронштейна 30 вступает во взаи.модействие с поверхностью 67 крюка 63 и подпружиненная губка 8 также перемещается вправо, скользя своим ползуном 62 в направляющих 60 каретки 56 и подготавливая тем самым губки 7 и 8 к зажиму очередной детали 61. Затем захват промьипленного робота подводится к следующей детали 61, и весь процесс его работь повторяется в последовательности, описанной выще.
В том случае, когда при переналадке захвата на деталь другого -типоразмера длины L и L деталей отличаются значительно и их разбег нельзя компенсировать регулировкой гайками 29 подпружиненной губки 8, перестановкой каретки 56 в новое положение или же сменой положения пальца 69, то направляющую 72 разбирают на составляющие ее секции 74 и заменяют новой направляющей, имеющей радиус R дугообразного паза 73, пропорциональный длине детали 61 нового типоразмера.
Благодаря тому, что направляющая 72 выполнена составной, можно деталь 61 ус- тановит1 под любым углом к горизонтальной плоскости. Для этого берется нужное количество секций 74 направляющей 72 и последней устанавливается концевая секция 76. Угол поворота при этом обеспечивается подбором длин и количества этих секций. Кроме того, устанавливается новый сменный диск 98, в котором стопорное отверстие 100 размещено под углом к горизонтали, соответствующим требуемому угловому положению детали 61 в момент установки ее на новую позицию. Все остальные требуемые регулировки описаны выще.
12Формула изобретения
0
1.Захват промыщленного робота, включающий корпус, установленные в нем зубчатые колеса, взаимодействующие с приводной и зажимной рейками, при этом на зажимной рейке установлена подпружиненная губка, а приводная рейка кинематически связана с губкой, имеющей возможность поворота относительно оси, параллельной продольной оси детали, отличающийся тем, что, с целью расщирения эксплуатационных возможностей захвата за счет обеспечения возможности поворота деталей относительно оси, перпендикулярной продольной оси детали, и
5 за счет упрощения переналадки захвата на детали различных типоразмеров, поворотная губка жестко закреплена на дополнительном валу, размещенном в опоре корпуса, а его ось перпендикулярна продольной оси детали, при этом дополнительный вал кине матически связан с приводной рейкой, а поворотная губка снабжена дополнительно введенной кареткой, имеющей возможность регулируемого перемещения вдоль продольной оси детали и имеющей продоль5 ные направляющие с возможностью расположения в них ползуна с жестко закрепленным на нем зажимным элементом подпружиненной губки, на основании которой установлены палец с возможностью регулировки и фиксации его положения относительно про0 дольной оси детали и крюк, головка которого выполнена сферической и имеющей возможность взаимодействия с Г-образным концом дополнительного кронштейна зажимной рейки, кроме того, на корпусе захвата жестко закреплена составная направляющая с
5 выполненным в ней дугообразным пазом, с центром в точке, лежащей на оси дополнительного вала, причем последняя секция направляющей выполнена расширяющейся с щириной больще или равной сумме двух
., диаметров пальца подпружиненной губки, который имеет возможность расположения в пазу и поочередного взаимодействия с внутренней и наружной сторонами дополнительно введенной стрелки, шарнирно смонтированной на последней секции направляющей
5 и подпружиненной в направлении наружной стороны дугообразного паза направляющей.
2.Захват по п. 1, отличающийся тем, что он снабжен сменными дисками, жестко устанавливаемыми на дополнительном валу и снабженными фиксатором своего положения
0 относительно поворотной губки в одном из крайних ее положений.
5/
Фиг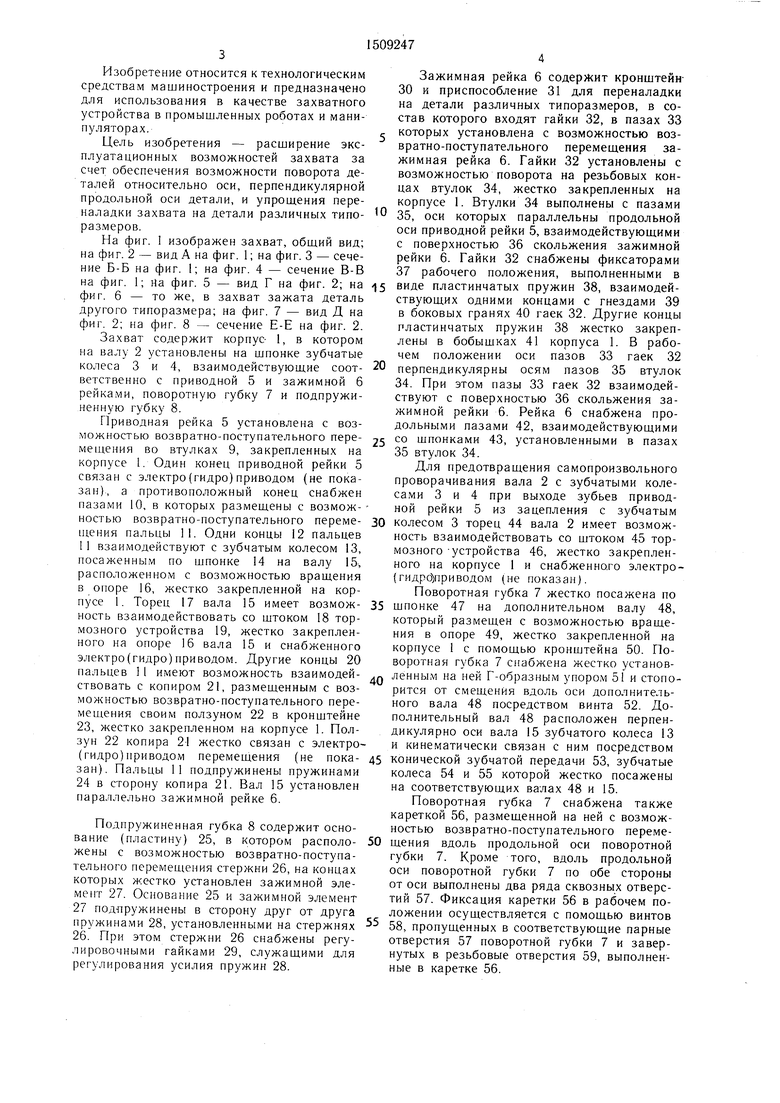
| название | год | авторы | номер документа |
|---|---|---|---|
| Захват промышленного робота | 1985 |
|
SU1288051A1 |
| Полуавтоматический станок для совместной обработки грифа и корпуса музыкальных инструментов | 1986 |
|
SU1339016A1 |
| Тележечный конвейер | 1988 |
|
SU1578053A1 |
| Способ изготовления теплообменников и стан для его осуществления. Устройство для передачи длинномерных изделий на обработку. Трубогибочная машина | 1981 |
|
SU1011322A1 |
| Устройство для мерной резки провода | 1981 |
|
SU1134266A1 |
| УСТРОЙСТВО ДЛЯ РЕЗКИ ТОНКОСТЕННЫХ ТРУБ | 1991 |
|
RU2010687C1 |
| Устройство для проведения инъекций | 1989 |
|
SU1630833A1 |
| ПРИСПОСОБЛЕНИЕ К АВТОМАТИЧЕСКИМ ТОКАРНЫМ СТАНКАМ ДЛЯ ПОДАЧИ МАТЕРИАЛА | 1931 |
|
SU38565A1 |
| Автомат для обмотки роторов электрических машин | 1972 |
|
SU540582A3 |
| Устройство для подачи материала в рабочую зону пресса | 1983 |
|
SU1346305A1 |
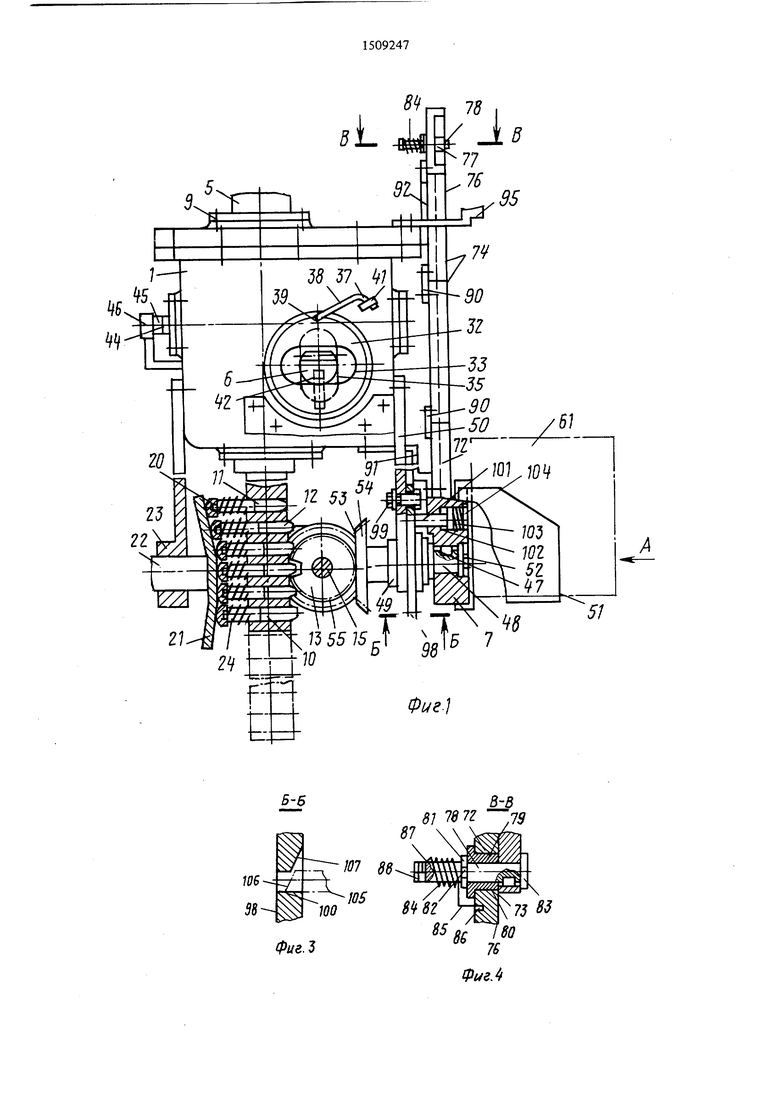
Изобретение относится к технологическим средствам машиностроения и предназначено для использования в качестве захватного устройства в промышленных роботах и манипуляторах. Целью изобретения является расширение эксплуатационных возможностей захвата за счет обеспечения возможности поворота деталей относительно оси, перпендикулярной продольной оси, и облегчение переналадки захвата на детали различных типоразмеров. Захват содержит корпус 1, приводную 5 и зажимную 6 рейки, взаимодействующие соответственно с зубчатыми колесами 3 и 4, установленными на валу 2, вал 15, размещенный в опоре 16 корпуса 1. На валу 15 установлено зубчатое колесо 13, имеющее возможность взаимодействовать с выдвижными пальцами приводной рейки 5, и коническое зубчатое колесо 54, находящееся в зацеплении с колесом 55, установленным на дополнительном валу. На этом же валу жестко крепится поворотная губка 7, в каретке 56 которой расположен ползун 62 с жестко закрепленной на нем подпружиненной губкой 8, которая состоит из основания 25 и зажимного элемента 27. На основании 25 крепится с возможностью регулировки его положения палец, имеющий возможность взаимодействия при работе с дугообразным пазом 73 направляющей 72, жестко закрепленной на корпусе 1 захвата. 8 ил.
Б-6
W6100
Фиг.З
«/ Jf fl
ML
фиг. 6
гП9 28 2.5 5
фие.5
S
Е-Е
Фиг Л
| Захват промышленного робота | 1985 |
|
SU1288051A1 |
| Видоизменение пишущей машины для тюркско-арабского шрифта | 1923 |
|
SU25A1 |
| , | |||
