Изобретение относится к транспорту, в частности к устройствам для регулирования скорости тягового электродвигателя электроподвижно о сое- тава.
Цель изобретения - повышение надежности.N На чертеже представлена блок-схема предлагаемого устройства.
Устройство содержит (по чертежу) тиристорно-нмпульсный преобразователь 1, питающий якорную обмотку 2 электродвигателя и подключенный входом к выходу регулятора 3. Вход ре- гулятора 3 соединен с выходом первого элемента 4 сравнения, один вход которого подключен к выходу датчика 5 тока якорной обмотки, а другой - к выходу регулятора 6 скорости, соеди- ненного входом с выходом второго элемента 7 сравнения, К одному из входов элемента 7 подключен датчик 8 скорости, а к другому - задатчик 9 скорости. Вентильный возбудитель Ю питает обмотку 11 возбуждения электродвигателя и подключен входом к выходу регулятора 1I тока обмотки возбуждения. Третий элемент 13 сравнения выходом подключен к входу регулятора 1 одним из входов - к датчику 14 тока возбуждения, другим из входов - к за- датчику 15 тока возбуждения и третьим входом - к выходу первого блока 16 умножения. Один из входов блока 16 подключен к выходу первого дополнительного элемента 17 сравнения, одним входом соединенным с выходом регулятора 3, а другим - с выходом первого источника 18 опорного сигнала. Второй дополнительный элемент 19 сравнения подключен одним входом к выходу источника 18, другим входом - к дополнительному выходу регулятора 3, а выходом - к одному из входов блока 20 деления. Блок 20 деления подключен выходом к другому входу блока 16, а другим входом - выходу третьего дополнительного элемента 21 сравнения. Один из входов элемента Л сравнения соединен с выходом задатчнка 15, а другой из входов - с выходом второго блока 22. умножения. Один лход блока 22 подключен к выходу регулятора 6, а другой вход - к выходу второго источ- ика 23 опорного сигнала.
Устройство работает следующим образом.
5 0 5 о
5
0
5
Автоматизированный тяговый электропривод осуществляет стабилизацию скорости и токов обмоток 2 и 11 якоря и возбуждения электродвигателя с помощью регулятора 6 скорости, регулятора 3 тока и регулятора 1 } тока возбуждения. Регулятор 6 скорости на основе рассогласования по скорости от датчика 8 и задатчика Ч формирует сигнал Ifl5 задания тока якоря. Регулятор 3 на основе рассогласования по току якоря от датчика 5 и регулятора 6. Ф°РмиРУет сигнал управления U тиристорным преобразователем 1. Аналогично, регулятор 12 тока возбуждения на основе рассогласования по току возбуждения от датчика 14 и задатчика 15 1 е в Формирует управляющее воздействие на входе вентильного возбудителя 10. Пока оп от регулятора 3, от источника 18 выходной сигнал Д11 первого дополнительного элемента 17 сравнения равен нулю и коррекгирующий сигнал КчЗи на выходе блока 16 умножения отсутствует.
Тля обеспечения работы электропривода на высоких скоростях предусмотрено автоматическое ослабление поля электродвигателя на величину, пропорциональную сигналу управления U регулятора 3. Так, при 1 - Поп (например lJ0 0 9UMMKcb сигнал 1аз задания тока возбуждения начинает уменьшаться на величину К Д с помощью третьего элемента 13 сравнения. При этом величина коэффициента 1C усиления функционально зависит от значений сигнала 163 задатчика 15 тока возбуждения и сигнала I на выходе регулятора 6 скорости. Блок 2J умножения (Нормирует на выходе сигнал произведения д мин 1рЗ Третий дополнительный элемент 21 сравнения формир -ет на выходе сигнал разности 18з- |ЗмиН- I ч . Второй дополнительный элемент 19 сравнения формирует на выходе сигнал разности U - -Uon. На выходе блока 20 деления формируется сигнал частного от деления числителя 1(,5 на знаменатель nMOCkc 1Jon- Таким образом реализуется выражение для вычисления
коэффициента К усиления: K -fii-- -а.
имокс иоп
Это выражение получено из условия, что во всех возможнп:-; режимах работы электропривода должно соблюдаться следующее соотношение :
где
/3
51
IB
т;г РМКН
- минимально допустимое значение коэффициента регулирования возбуждения электродвигателя .
Таким образом, при изменении сигнала управления U тиристорным преобразователем в диапазоне от Uon до и/к«к.сдля полного использования возможности регулирования магнитного потока электродвигателя необходимо ток возбуждения Ig изменять в диапазоне от I«, до А I ,,.
03 глин 3
Эффективность устройства закпючает ся в повышении надежности работы тягового электродвигателя путем исключения аварийного режима работы - кругового огня на коллекторе, за счет введения функциональной зависимости степени ослабления поля электродвигателя от заданных значений тока якоря и тока возбуждения.
Формула изобретения
Устройство дчя регулирования скорости тягового электродвигателя электроподвижного состава, содержащее включенный в цепь якорной обмотки электродвигателя тиристорно-импульсный преобразователь, вход которого подключен к выходу регулятора, соединенного входом с выходом первого элемента сравнения, один из входов которого подключен к датчику тока якорной обмотки электродвигателя, а другой -- к выходу регулятора скорости, соединенного входом с выходом второго элемента сравнения, один из входов которого подключен к датчику скорости
Ь74196
электродвигателя, а другой - к зядат- чику скорости электродвигателя, и включенный в цепь обмотки возбуждения электродвигателя вентильный возбудитель, вход которого подключен к выходу регулятора возбуждения, соединенного с выходом третьего элемента сравнения, один из входов которого подключен к датчику тока обмотки возбуждения, другой вход - к задатчику тока возбуждения, а третий вход связан с выходом регулятора тока электродвига10
0
S
0
5
0
что, с целью повышения надежности, оно снабжено источниками опорного сигнала, блоком деления, блоками умножения и дополнительными элементами сравнения, один из входов одного из которых подключен к выходу регулятора тока, другой вхбд - к выходу одного из источников опорного сигнала, а выход - к одному ит входов одного из блоков умножения, выход которого соединен с третьим входом третьего элемента сравнения, а другой вход соединен с выходом блока деления, подключенного одним входом к выходу второго дополнительного элемента сравнения, один из входов которого соединен с выходом одного из источников опорного сигнала, а другой - с другим выходом регулятора тока, а другим входом - с выходом третьего дополнительного элемента сравнения, один вход которого подключен к задатчику тока возбуждения, а другой вход - к выходу другого блока умножения, соединенного одним входом с выходом другого источника опорного сигнала, а другим-входом - с выходом регулятора скорости электродвигателя .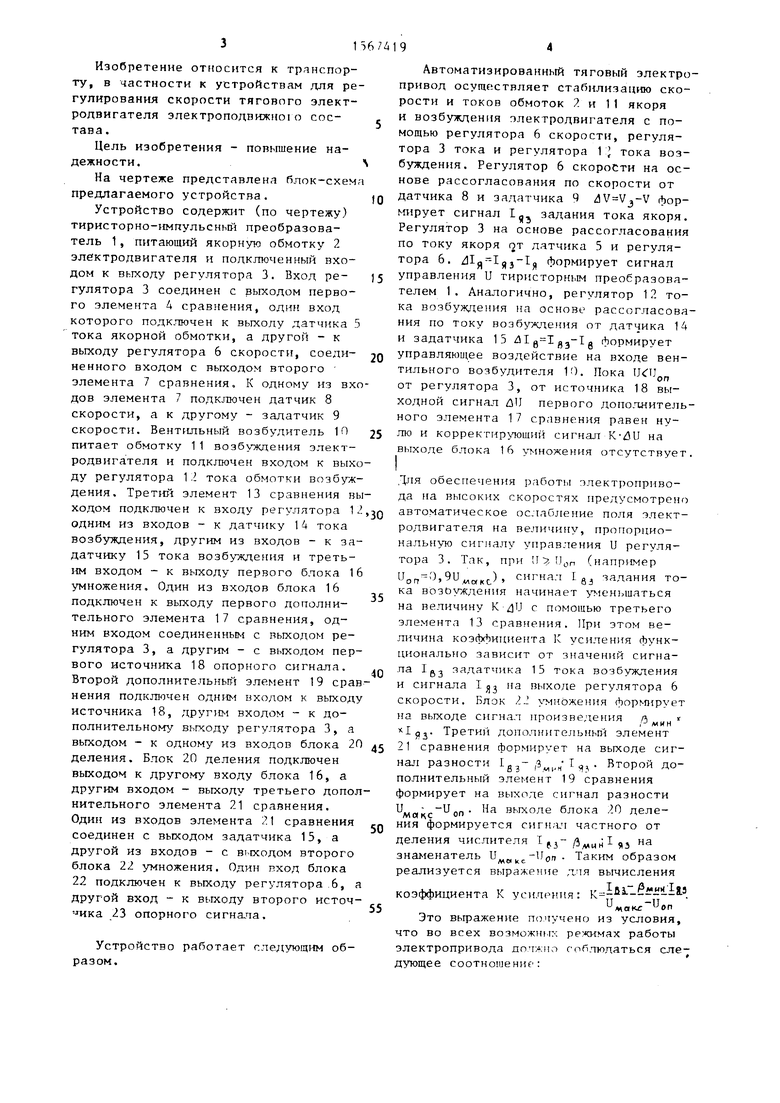

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство для электрического торможения электроподвижного состава переменного тока | 1982 |
|
SU1079491A1 |
| Устройство для управления электрическим торможением электроподвижного состава переменного тока | 1987 |
|
SU1468790A1 |
| УСТРОЙСТВО ДЛЯ РЕГУЛИРОВАНИЯ РЕКУПЕРАТИВНОГО ТОРМОЗА ЭЛЕКТРОВОЗА ПОСТОЯННОГО ТОКА | 2012 |
|
RU2514961C1 |
| Устройство для регулирования скорости электроподвижного состава | 1989 |
|
SU1643219A1 |
| Устройство для управления тяговым приводом электровоза с двигателями независимого возбуждения | 1982 |
|
SU1079493A1 |
| Регулятор мощности тяговых электродвигателей подвижного состава | 1980 |
|
SU965822A1 |
| Электропривод | 1981 |
|
SU985911A1 |
| Способ регулирования скорости тягового электродвигателя | 1979 |
|
SU783071A1 |
| Устройство для импульсного регулирования напряжения тягового электродвигателя постояннного тока | 1979 |
|
SU880814A1 |
| Устройство для импульсного регулирования скорости электроподвижного состава | 1985 |
|
SU1390080A1 |
Изобретение относится к транспорту, в частности к устройствам для регулирования скорости тягового электродвигателя электроподвижного состава, и направлено на повышение надежности. Устройство осуществляет стабилизацию скорости и токов обмоток 2 и 11 якоря и возбуждения тягового электродвигателя, питаемых от тиристорно-импульсного преобразователя 1 и вентильного возбудителя 10 с помощью регуляторов 3, 6 и 12 соответственно токи якорной обмотки, скорости и тока возбуждения. Регулирование осуществляется по сигналам рассогласований от задатчиков 9 и 15 и датчиков 5, 8 и 14. При ослаблении поля на высоких скоростях движения для поддержания коэффициента β ослабления поля не ниже минимально допустимого значения βмин ток обмотки возбуждения изменяют в диапазоне от заданной величины тока возбуждения IВЗ до значения, равного произведению минимально допустимого значения коэффициента ослабления поля на заданное значение тока якорной обмотки. Сигнал коррекции вычисляется с помощью блоков 16 и 22 умножения, блока 20 деления, элементов 17, 19 и 21 сравнения и источников 18 и 23 опорных сигналов. 1 ил.
| Аппарат для очистки на плаву подводной части обшивки судна | 1948 |
|
SU83071A1 |
| Способ получения молочной кислоты | 1922 |
|
SU60A1 |
