Изобретение относится к манипуляторам, а именно к передвижным кранам-манипуляторам для переноса и монтажа штучных изделий, в частности укрупненных камней и
плит.,.
Цель изобретения - повышение удобства эксплуатации при передаче груза в стесненных условиях строительного объекта.
На фиг. 1 показан кран в рабочем состоянии, вид сбоку; на фиг. 2 - то же, вид сверху; на фиг. 3 - кран в транспортном состоянии, вид сбоку; на фиг. 4 - вид А на
фиг. 2.
Кран содержит горизонтальную раму 1, смонтированную на ней колонну 2, несуВыносные опоры 15 для создания возможности перекатывания крана-м-анипулятора в рабочем состоянии снабжены опорными колесами 20, посаженными в вилках 21, связанных с плечами 16 посредством осей 22 для разворота согласно требуемому направлению перемещения. Эти вилки, как и вилки колес 7, имеют фиксаторы разворота и болты торможения, не показанные на фигуре.
10 Кран снабжен распределенным противовесом-балластом, части которого размещаются на четырех выносных опорах, причем каждая часть предпочтительно состоит из двух и большего количества элеменлилчсппп.
Каждый элемент имеет снизу паз (не показан), а сверху прямоугольную скобу-рукоять 24, причем паз и рукоять по ширине отвечают ширине плеча выносной опоры. Это позволяет в рабочем состоянии надевать один элемент на плечо выносной опоры, а другой на рукоять первого, фиксируя их друг к другу. Для управления подъемом стрелы служит переносная кноf f
гмпнтипованную на ней килинну .i, n,v.j--.
пГю п вооотную стрелу 3 для груза, пере- 5 ™в 23 для облегчения ручного съема и в Тхва способном по ней накладывания, а также переноса с одного пеоекать ваться и снабженную кареткой 4, этажа на другой, если кран-манипулятор посаженноГв вертикальные направляющие используется с перемещениями на разные 5 имеющие возможность свободно вращать- этажи здания. Распределенный балласт ся вокруг колонньТ 2 Каретка 4 вместе со уравновешивает груз, а также дополнительно стрелои З а также переносимым грузом мо- 20 фиксирует выносные опоры 15 в рабочем жет подниматься и опускаться в направляю- положении. щих под- действием электролебедки 6, прикрепленной к тем же направляющим и способной вращаться вместе с ними вокруг колонны 2.
Рама 1 снабжена ходовыми колесами /, связанными с ней посредством вилок 8 с вертикальными осями 9. Как видно на фиг. 4, горизонтальная ось 10 вращения каждого колеса 7 посажена в вилке 8 через эксцентри-. ки 11 поворачиваемые фиксируемой ру- зо почная станция 25. коятью 12 Это позволяет выставлять коле- Работа крана пояснена применительно к са в вилках в нижнее положение для приема монтажу его с помощью фосфогипсовых пазо- на себя тяжести кр ана-манипулятора при не- гребенных плит в перегородочные стены с , обходимости его перекатывания на этих коле- его перекатыванием по уложенным вдоль сах в транспортном нерабочем состоянии. стены швеллерам и осуществляется слеВипки с колесами могут разворачивать- 35 ДУЮЩИм образом.
ся на осях 9 относительно рамы согласноДоставив к месту возведения стены пася на оснх 3 ulнu. к тележке и расположив в рабочем состоянии, т. е. опирая на разведенные выносные опоры 15, параллельно линии стены, приступают к поштучному переносу
Для удерживания крана-манипулятора плит из пакета в стену. Для этого опера- на месте на колесах в стенке каждой вилки тор берет в левую руку переносную кно- имеется болт 14 с рукоятью, позволяющий почную станцию управления лебедкой крана, прижать его до упора в колесный диск для а правой рукой наводит в горизонтальной торможенияплоскости захват, подвешенный к стреле.
Вместе с тем к раме 1 прикреплены д. на первую из плит пакета. Нажимая кнопку подвижно четыре выносные сводимые опо- опускания стрелы 3 он ставит самозаземляю- ры 15 (фиг 4), являющиеся аутригерами, щий захват на верхнюю грань плиты и, каждая из которых имеет плечо 16, связан- нажимая на кнопку подъема стрелы, вызы- ное с рамой через вертикальный шарнир 17 вает подъем захвата.
для создания возможности разворота опорыПри этом захват защемляет плиту и подв горизонтальной плоскости, и горизон- 50 нимается вместе с ней на желаемую опе- тальный шарнир 18, позволяющий опускать ратором высоту. Воздействуя правой рукой выносную опору в горизонтальное рабочее на захват для его перемещения по стреле, положение или запрокидывать кверху при а вместе с тем на стрелу для ее повора- приведении крана-манипулятора в транс- чивания, оператор подводит плиту к месту портное состояние.монтажа в стену и вызывает нажатием на
Плечо 16 имеет дополнительно упорный 55 кнопку установку плиты в стену, что ав- наконечник для жесткой фиксации в рабо- томатически сопровождается раскрытием зах- чем горизонтальном состоянии, например вата. Повторяя те же операции, он последо- посредством чеки 19.вательно переносит в стену следующие плитребуемому направлению перекатывания, причем фиксаторы 13 позволяют удерживать вилки при выбранном развороте.
Выносные опоры 15 для создания возможности перекатывания крана-м-анипулятора в рабочем состоянии снабжены опорными колесами 20, посаженными в вилках 21, связанных с плечами 16 посредством осей 22 для разворота согласно требуемому направлению перемещения. Эти вилки, как и вилки колес 7, имеют фиксаторы разворота и болты торможения, не показанные на фигуре.
Кран снабжен распределенным противовесом-балластом, части которого размещаются на четырех выносных опорах, причем каждая часть предпочтительно состоит из двух и большего количества элемен-.
™в 23 для облегчения ручного съема и накладывания, а также переноса с одного этажа на другой, если кран-манипулятор используется с перемещениями на разные этажи здания. Распределенный балласт уравновешивает груз, а также дополнительно фиксирует выносные опоры 15 в рабочем положении.
лилчсппп.
Каждый элемент имеет снизу паз (не показан), а сверху прямоугольную скобу-рукоять 24, причем паз и рукоять по ширине отвечают ширине плеча выносной опоры. Это позволяет в рабочем состоянии надевать один элемент на плечо выносной опоры, а другой на рукоять первого, фиксируя их друг к другу. Для управления подъемом стрелы служит переносная кноf f
5 ™в 23 для облегчения ручного съема и накладывания, а также переноса с одного этажа на другой, если кран-манипулятор используется с перемещениями на разные этажи здания. Распределенный балласт уравновешивает груз, а также дополнительно 0 фиксирует выносные опоры 15 в рабочем положении.
. зо почная станция 25. Работа крана пояснена применительно к монтажу его с помощью фосфогипсовых пазо- гребенных плит в перегородочные стены с его перекатыванием по уложенным вдоль стены швеллерам и осуществляется слеты, вплоть до конца ряда в стене, или насколько это позволяет длина стрелы крана- манипулятора.
Во втором случае, исчерпав возможности стрелы 3 по длине стены, оператор, не сводя выносных опор 15, перекатывает кран вдоль стены, насколько это целесообразно, и, зафиксировав на месте затор- можением одного из колес 20 болтом его вилки, продолжает кладку начатого ряда до его конца. Обычно одной перекатки бывает Ю достаточно. При очень длинных стенах можно число перекаток увеличить.
Доведя монтаж плит первого ряда до конца, не перекатывая кран обратно, начинают кладку следующего ряда в обратном направлении, делая и при этом позже необходимую обратную перекатку крана.
Когда в процессе укладки рядов друг на друга высоту стены доводят до предела досягаемости человеческой руки, ставят подЕсли при подаче крана-манипулятора на верхние этажи здания отсутствуют электроподъемник или другие механические средства, кран можно перенести и на руках, g разбирая предварительно на узлы массой до 80 кг. Такими самостоятельно переносимыми частями являются стрелы 3, узел привода ее подъема, направляющие 5 с колонной 2, рама 1 с ее колесами 7, выносные опоры 15 и элементы 23 балласта.
Формула изобретения
15
1. Передвижной кран, содержащий горизонтально расположенную прямоугольную раму с ходовыми колесами и колонной, смонтированный на последней грузоподъемный механизм, поворотные в вертикальных плоскостях связанные с упомянутой рамой аутригеры с опорными колесами и приспомости, например высотой 1,3м. Продолжать 20 собление для удержания аутригеров в ра- монтаж оператор может с помощником, при-бочем положении, включающее в себя фикса тор, отличающийся тем, что, с 1.елью повышения удобства эксплуатации при передаче груза в стесненных условиях строительного объекта, поворотные в вертикальных плоскостях аутригеры прикреплены к раме по одному в зоне каждого ее угла посредством вертикальных осей, приспособление для удержания упомянутых аутригеров снабжено съемными противовесами, каждый из коточем тот остается на полу, чтобы брать плиты из пакета, тогда как сам оператор, находясь на подмости, направляет плиты при установке в стену. Работа может проводиться далее и одним оператором, если он предварительно, находясь на полу, переносит сперва определенное количество плит на под- мость, а затем, поднявщись сам на нее, переставляет плиты в стену.
25
По окончании монтажа данной стены one- 30 выполнен с возможностью соединения с
ратор может перейти на монтаж следующей, перекатывая кран на колесах 20 выносных опор, если не требуется перемещать его через дверные проемы. В противном случае для прохождения через дверь кран-манипулятор переводят в транспортное состояние. Для этого снимают балласт и сводят выносные опоры 15, оперев предварительно кран на ходовые колеса 7 рамы. Верхнюю часть направляющих запрокидывают вниз, предварительно приведя стрелу 3 в нижнее положение. Для укорочения крана стрелу 3 можно снять.
В таком транспортном состоянии кран- манипулятор транспортируют с одной стройки на другую.
35
40
соответствующим аутригером над опорным колесом, а ходовые колеса соединены с рамой посредством вертикальных осей и установлены с возможностью фиксированного регулируемого перемещения вдоль этих осей.
2. Кран по п. 1, отличающийся тем, что- каждый из противовесов выполнен составным с прямоугольной скобой-рукоятью на верхней поверхности и пазом в нижней поверхности каждого элемента этого противовеса с возможностью охвата упомянутым пазом несущей опорное колесо балки соответствующего аутригера или упомянутой скобы нижерасположенного элемента этого противовеса.
Если при подаче крана-манипулятора на верхние этажи здания отсутствуют электроподъемник или другие механические средства, кран можно перенести и на руках, разбирая предварительно на узлы массой до 80 кг. Такими самостоятельно переносимыми частями являются стрелы 3, узел привода ее подъема, направляющие 5 с колонной 2, рама 1 с ее колесами 7, выносные опоры 15 и элементы 23 балласта.
Формула изобретения
30 выполнен с возможностью соединения с
35
40
соответствующим аутригером над опорным колесом, а ходовые колеса соединены с рамой посредством вертикальных осей и установлены с возможностью фиксированного регулируемого перемещения вдоль этих осей.
2. Кран по п. 1, отличающийся тем, что- каждый из противовесов выполнен составным с прямоугольной скобой-рукоятью на верхней поверхности и пазом в нижней поверхности каждого элемента этого противовеса с возможностью охвата упомянутым пазом несущей опорное колесо балки соответствующего аутригера или упомянутой скобы нижерасположенного элемента этого противовеса.
Фиг. 2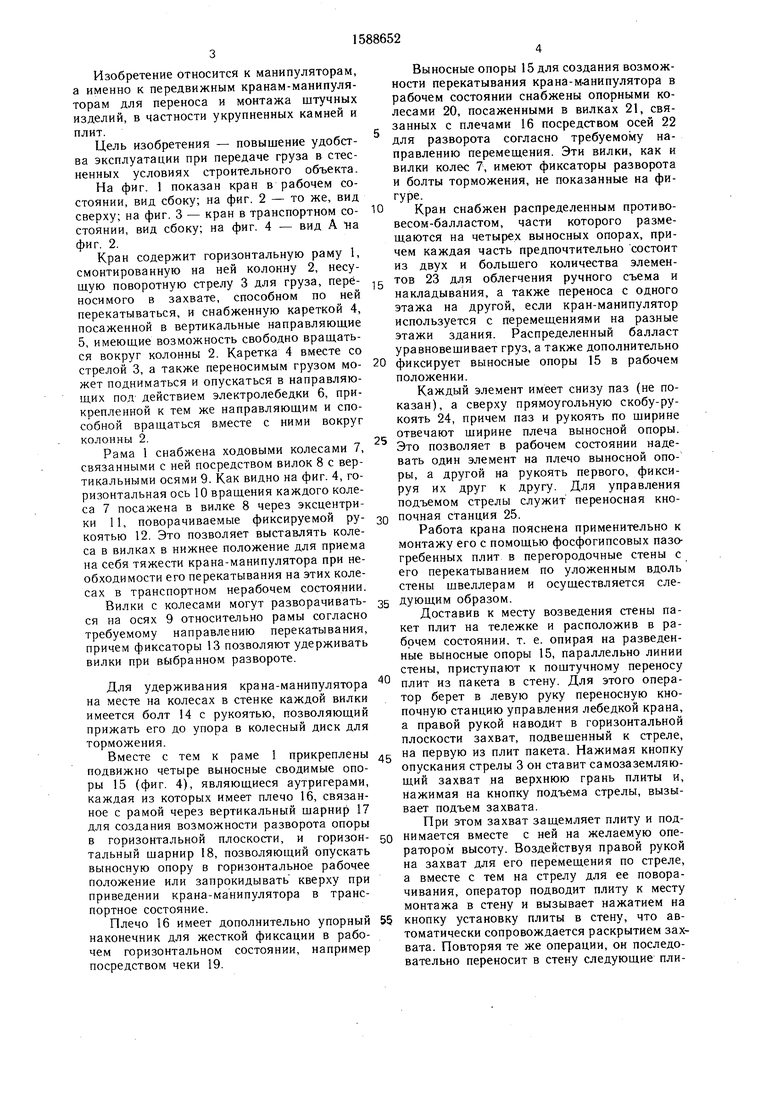

| название | год | авторы | номер документа |
|---|---|---|---|
| КРАН-МАНИПУЛЯТОР МЕТАЛЛОВОЗНЫЙ | 1998 |
|
RU2140367C1 |
| Способ подъема груза | 2019 |
|
RU2703097C1 |
| КРАНОМАНИПУЛЯТОРНАЯ УСТАНОВКА | 1999 |
|
RU2167803C2 |
| КРАН-МАНИПУЛЯТОР | 2002 |
|
RU2240972C2 |
| КРАН-МАНИПУЛЯТОР | 2002 |
|
RU2237612C2 |
| Кран-манипулятор К.Б.Розина | 1986 |
|
SU1567506A1 |
| КРАН-МАНИПУЛЯТОР ЛЕСОВОЗНЫЙ | 1999 |
|
RU2169673C2 |
| СПОСОБ ПОДЪЕМА ГРУЗОВ МОБИЛЬНЫМ КРАНОМ | 2012 |
|
RU2494955C1 |
| КРАН-МАНИПУЛЯТОР | 2004 |
|
RU2263589C1 |
| СПОСОБ ЗАБИВАНИЯ И ИЗВЛЕЧЕНИЯ ИЗ ГРУНТА МЕТАЛЛИЧЕСКИХ СТОЛБИКОВ ПРЕИМУЩЕСТВЕННО ПРИ ВОЗВЕДЕНИИ И РЕМОНТЕ БАРЬЕРНЫХ ОГРАЖДЕНИЙ АВТОМОБИЛЬНЫХ ДОРОГ И КОПРОВЫЙ МАНИПУЛЯТОР ДЛЯ ЕГО ОСУЩЕСТВЛЕНИЯ | 2001 |
|
RU2211895C2 |
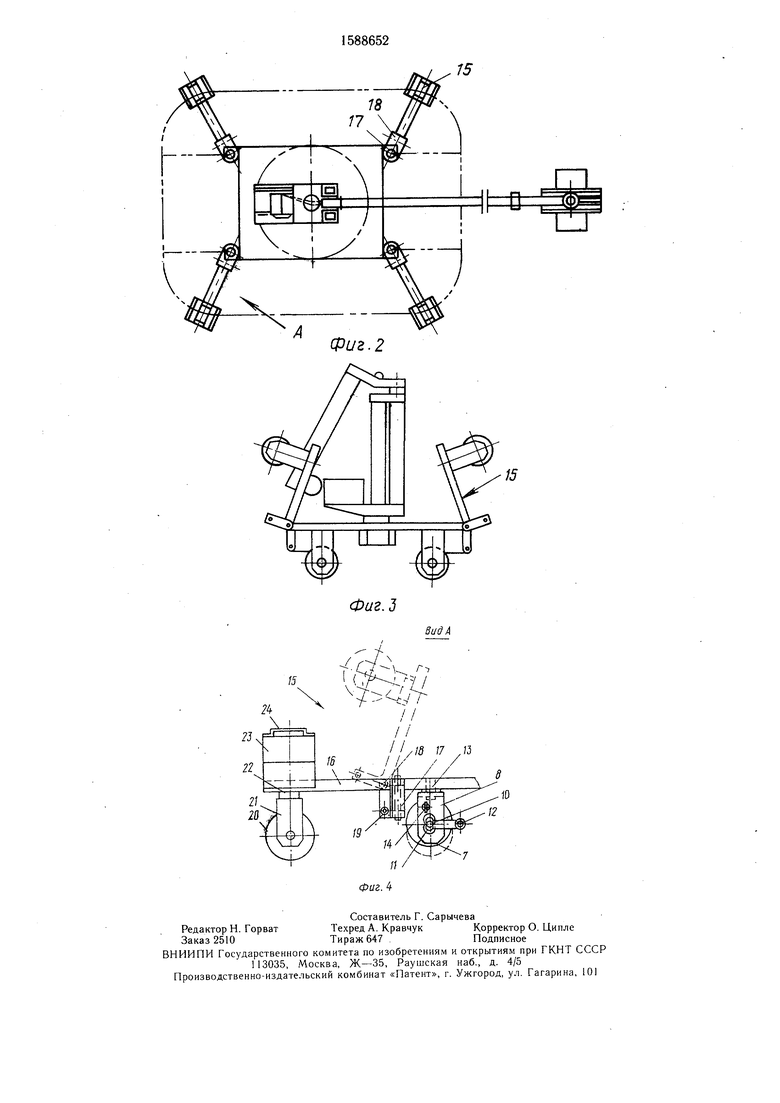
Изобретение относится к грузоподъемному машиностроению. Цель изобретения - повышение удобства эксплуатации при передаче груза в стесненных условиях строительного объекта. Кран содержит горизонтально расположенную прямоугольную раму 1, на которой закреплена неподвижно колонна 2, несущая двухзвенную стрелу 3, имеющую возможность вращения вместе с направляющими 5. Вертикально стрела перемещается вдоль направляющих 5 под действием электролебедки 6. Кран снабжен двумя комплектами поворотных вокруг вертикальных осей колес. Четыре колеса 7, являющихся ходовыми, первого комплекта расположены под рамой 1 и служат для перекатывания крана в транспортном состоянии при откинутых вверх сводимых и разводимых имеющихся выносных опорах, служащих для увеличения размеров опорной базы крана в рабочем состоянии и повышения устойчивости против опрокидывающих моментов от подвешенного к стреле груза. Для создания возможности перекатывания крана в любом направлении и в рабочем состоянии с разведенными выносными опорами последние оснащены собственным комплектом из четырех поворотных опорных колес 20, воспринимающих тяжесть всего крана в рабочем состоянии. Для дополнительного повышения устойчивости крана в работе, а также фиксации в рабочем положении особенно при большой высоте подъема стрелы выносные опоры в рабочем состоянии дополнительно нагружаются частями составного балласта. Каждая из четырех частей балласта роассредоточенных по выносным опорам, состоит для облегчения съема, установки или переноса из нескольких элементов 23, укладываемых друг на друга. Каждый элемент снабжен сверху плоской рукоятью, а снизу пазом для фиксирования на плече выносной опоры или на ниже уложенном элементе. 1 з.п. ф-лы, 4 ил.
Фаг.З
| Автоматизированный склад | 1980 |
|
SU992344A1 |
| Разборное приспособление для накатки на рельсы сошедших с них колес подвижного состава | 1920 |
|
SU65A1 |
