Изобретение относится к лесной и деревообрабатывающей отраслям и может быть использовано для захвата стволов деревьев,,
Целью изобретения является повышение эффективности захвата стволов деревьев при их перемещении роликами.
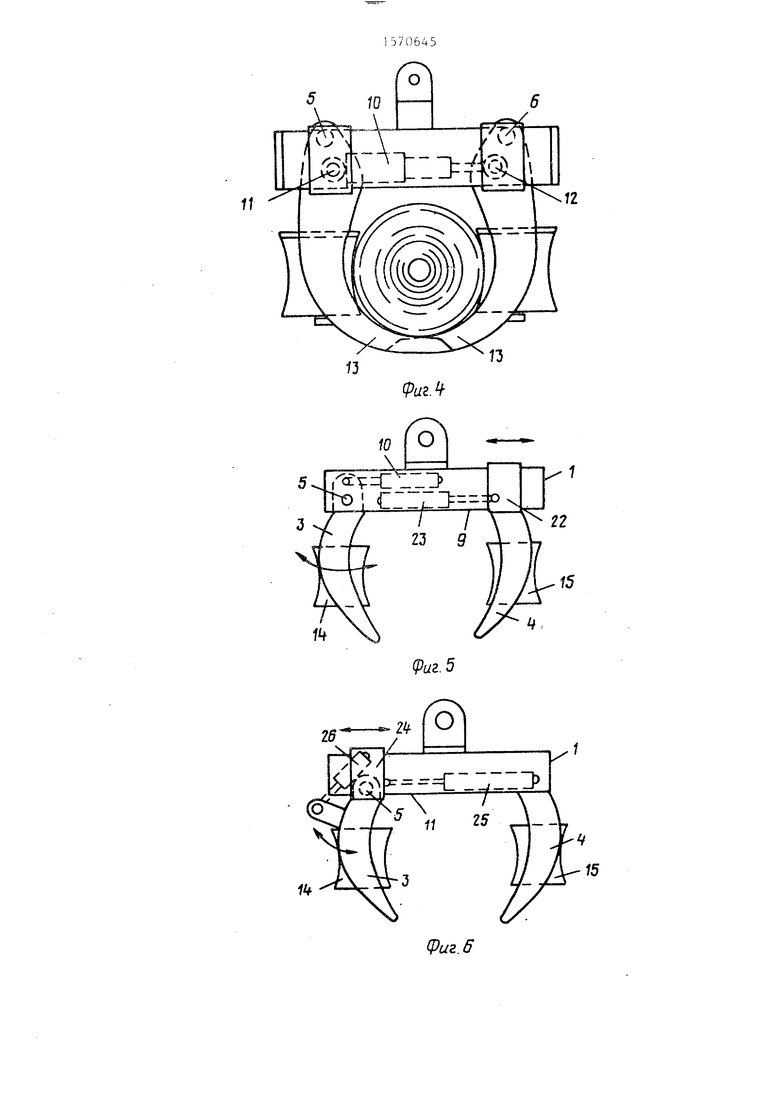
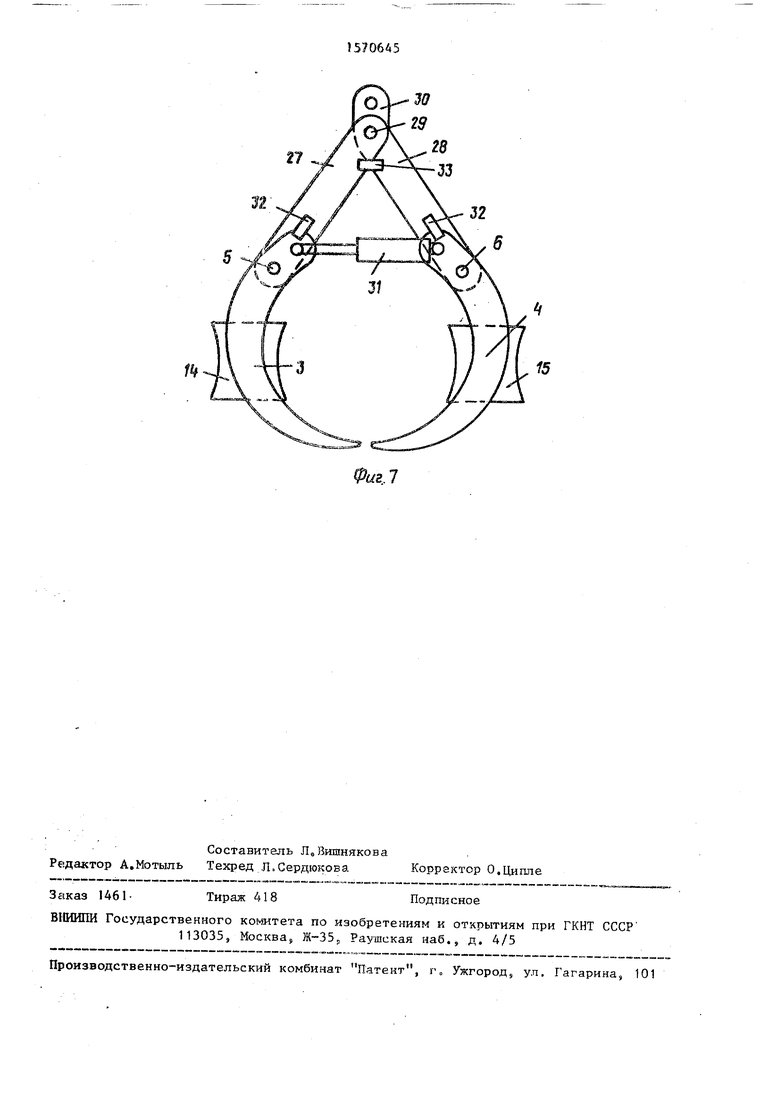
На фиг,1 показано захватывающее устройство, вид сбоку; на фиг,2 - то же с максимально смещенными по направлению один к другому захватывающими рычагами; на фиг„3 - то жеэ с максимально разведенными один от дру- того захватывающими рычагами на фигэ4 - то же, с использованием дву- ступенчатого гидроцилиндра;; ча фиг05- то же s имеющее один рычаг поворотно подвижным, а другой рычаг прямоли™ нейно подвижнымЈ на фиг06 - то же9 имеющее один рычаг неподвижно закрепленный,, а другой рычаг перемещающийся прямолинейно и поворотноj на фигв7 - то же9 у которого основание выполне- но в виде тяг, шарнирно соединенных в в одной точке,
Захватывающее устройство (фиг01- 3) содержит основание 1, которое при помощи соединительного элемента 2 может крепиться на любом переносящем средстве, например стреле кранас, Между связывающим элементом и стрелой крана может быть установлен ротатор с целью вращения всего захватывающего устройства вокруг вертикальной оси0 На основании 1 закреплены два захватывающих рычага 3 и 4Р которые шарнирно установлены при помощи параллельных стержней 5 и 6 на ползунах 7 и 8о Ползуны 7 и 8 смонтированы на основании при помощи направляющей 98 принадлежащей основанию0 Гидроцилиндр 10 закреплен между ося™ ми 11 и 12, которые расположены на сторонах плеч, противоположных плечам, имеющим захватывающие концы 13, На рычагах установлены ролики 14 и 15, -имеющие возможность вращения вок- руг осей 16 и 17, расположенных перпендикулярно стержням 5 и 6. Роли - ки, по крайней мере один из которых приводной,- имеют вогнутую огибающую ствол поверхность для того, чтобы вн зависимости от диаметра стволов центры стволов в захватывающем устройстве располагались в одном же месте устройства,.
Захватывающие концы рычагов при захваченном стволе образуют перекрытие, которое не позволяет стволу выпасть,, Устройство имеет блокирующи средствао К ним относятся фиксаторы 18 и 19, установленные на рычагах 3 и 4, позволяющие осуществлять блокировку рычагов 3 и 4 относительно ползунов 7 и 8 в положениях, показант ных сплошными линиями на фиг.1 и 2„ В этом случае поворот рычагов 3 и 4 вокруг стержней 5 и 6 невозможен, а возможно прямолинейное перемещение рычагов посредством ползунов и гидроцилиндра. Однако как только блокирующие детали, занимают положение, показанное штриховыми линиями, повороты вокруг стержней становятся возможными К блокирующим средствам относятся фиксаторы 20 и 21, которые в положении, показанном на фиг.З, блокируют втулки относительно основания
В приведенных вариантах исполнения имеет место ползун 22, который гидроцилиндром 23 задает рычагу только одно прямолинейное движение (фиг,5), Ползун 24 задает рычагу при помощи гидроцилиндра 25 прямолинейное движение, с другой стороны ползун 24 соединен с рычагом гидроцилинром 26, задающим рычагу поворотное движение (фиг06)0 Основание может быть выполнено в виде тяг 27 и 28, соединенных при помогай стержня 29„ Такое основание имеет соединительный элемент 30, а между рычагами действует гидроцилиндр 310 Между тя- гамк и рычагами действуют фиксаторы 325 а между тягами - фиксатор 33.
При работе устройства, когда оно используется для захватывания стволов, ранее сваленных с помощью други средств, первоначальное положение - захватывающих рычагов соответствует фиг.З Затем захватывающее устройство располагается с помощью стрелы крана в соответствующем положении относительно ствола, после чего захватывающие рычаги с помощью гидроцилиндра 10 сближаются поворотным движением (ползуны в этом случае блокируются относительно основания) Когда захвзгылчющие концы 13 начинают поджимать корневой участок, фиксаторы 20 и 21 освобождаются
Когда рычаги с роликами займут положение с, приближенное к вертикальному, рычаги блокируются относительно ползунов фиксаторами 18 и 19 (фиг.1)0 Сжатие гидроцилиндра 10 приводит к прямолинейному перемещению захватывающих рычагов по направлению их сближения. Ствол зажимается между роликами 14 и 15, которые осуществляют его подачу через захватывающее устройство По мере уменьшения диаметра ствола в направлении к вершине захватывающие рычаги с роликами прямолинейно сближаются (фиг.2)о После того, как ствол полностью пройдет через захватывающее устройство, рычаги прямолинейно перемещаются в противоположных направлениях с помощью гидроцилиндра 10 до тех пор, пока ползуны не займут крайние положения, после чего фиксаторами 20 и 21 ползуны блокируются относительно основания, а фиксаторы 18 и 19 в этот момент освобождаются и рычагам дается возможность повопота в положение, соответствующее максимальному разводу (Фиг.3).
Изобретение может быть воплощено и в варианте, когда присоединительные оси 11 и 12 гидроцилиндра расположены на тех же плечах рычагов, что и концы 13. Такое расположение приводит к необходимости большего рабочего диапазона гидроцилиндра, который для такого варианта может быть выбран двухступенчатым (фиг.4)0
Вариантом выполнения может быть установка одного из захватывающих рычагов 3 шарнирно на стержне 5, закрепленном на основании 1 и связанном с гидроцилиндром 10, осуществляющим поворот рычага вокруг стержня 5 о Другой рычаг 4 установлен с возможностью прямолинейного движения вдоль основания. При этом рычаг смонтирован на ползуне 22, перемещающемся по направляющей 9 от гидроцилиндра 23„ Захватывающие рычаги смогут перемещаться относительно друг друга с помощью поворота рычага 3 вокруг стержня 5 либо с помощью перемещения ползуна вдоль направляющей, либо путем одновременного сочетания названных перемещений (фиг.5)0
Вариантом выполнения может быть неподвижное присоединение рычага 4 к основанию 1. Второй захватывающий рычаг 3 может иметь поворотное и прямо- ,линейное перемещения. Для этого рычаг 3 шарнирно монтируется на ползуне 24 при помощи стержня 5, Ползун
10
15
20
70645 .6
перемещается по направляющей 9 основания 1 при помощи гидроцилиндра 25, - - действующего между основанием и ползуном. Поворот рычага 3 осуществляется при помощи гидроцилиндра 26, установленного между ползуном и рычагом (фиг.6).
В варианте исполнения (фиг07) основание может быть выполнено в виде тяг 27 и 28, соединенных шарнирно в- одной точке при помощи стержня 29 с возможностью поворота, В верхней, точке тяг имеется соединительный эле.мент 30 для связи устройства со стрелой крана или подобным средством0 На свободных концах тяг шарнирло при помощи стержней 5 и 6 смонтированы захватывающие рычаги 3 и 4 с роликами 14 и 15. Рычаги приводятся в движение при помощи гидроцилиндра 310 Рычаги могут быть блокированы относительно тяг с помощью фиксаторов 32. Тяги могут быть блокированы одна относительно другой с помощью фиксатора 33 в различных поворотных положенияхо
При сблокированном положении тяг одна относительно другой захватывающие рычаги 3 и 4 с роликами 14 и 15 могут поворачиваться при помощи гидроцилиндра 31 вокруг стержней 5 и 6. Такое перемещение обеспечивает хорошую захватывающую способность. При свободном положении тяг и блокированном положении рычагов относительно тяг во время расширения и сжатия гидроцилиндра осуществляется поворот тяг с блокированными рычагами отно- . сительно стержня 29 В этом случае стволы с различными диаметрами могут эффективно поддерживаться между роликами и подаваться в обрабатывающее устройство. Приспособление к 45 изменению диаметра осуществляется путем поворота вокруг стержня 29„
25
30
35
40
Формула изобретения
50 Захватывающее устройство для стволов деревьев, содержащее основание, два захватывающих рычага, каждый из которых имеет смонтированный на них ролик, и гидроцилиндр поворота рычагов, отличающееся тем,
55
что, с целью повышения эффективности захвата стволов деревьев при их перемещении роликами, на основании смонтированы ползуны, захватывающие
рычаги шарнирно установлены на ползунах и снабжены фиксаторами их положения относительно ползунов для обеспечения поворота рычагов или перемещения ползунов с помощью гидроцилиндра.

| название | год | авторы | номер документа |
|---|---|---|---|
| Устройство привода | 1990 |
|
SU1831456A3 |
| Укладчик плит | 1976 |
|
SU657108A1 |
| УСТРОЙСТВО для ПРОТАСКИВАНИЯ И СБРОСКИ СТВОЛОВ ДЕРЕВЬЕВ ПРИ ОБРАБОТКЕ ИХ В СУЧКОРЕЗНОЙ МАШИНЕ | 1966 |
|
SU178966A1 |
| Устройство для подготовки стволово-гО ОСМОлА | 1979 |
|
SU808056A1 |
| Укладчик плит | 1977 |
|
SU753974A2 |
| Машина для обрезки сучьев с поваленных деревьев | 1975 |
|
SU648406A1 |
| Сучкорезно-раскряжевочное устройство | 1985 |
|
SU1291403A1 |
| Укладчик плит | 1971 |
|
SU503976A1 |
| Клещевой захват лесозаготовительной машины | 1986 |
|
SU1342858A1 |
| Система управления манипулятором | 1981 |
|
SU990503A2 |

Изобретение относится к лесной и деревообрабатывающей отраслям. Целью изобретения является повышение эффективности захвата стволов деревьев при их перемещении роликами. Захватывающее устройство содержит основание 1. На основании 1 закреплены два захватывающих рычага 3 и 4. Эти рычаги при помощи стержней 5 и 6 шарнирно установлены на ползунах 7 и 8. Последние смонтированы на основании и установлены на направляющей 9. Рычаги 3 и 4 приводятся в движение при помощи гидроцилиндра 10. На рычагах установлены ролики 14 и 15. При работе устройства, осуществляющего захват ствола, вначале захватывающие рычаги с помощью гидроцилиндра 10 сближаются поворотным движением. Ползуны блокированы относительно основания фиксаторами. После освобождения этих фиксаторов фиксаторы 18 и 19 блокируют рычаги относительно ползунов 7 и 8. Сжатие гидроцилиндра 10 приводит к прямолинейному перемещению рычагов по направлению их сближения. Ствол зажимается между роликами 14 и 15, которые осуществляют его подачу. По мере уменьшения диаметра ствола захватывающие рычаги с роликами прямолинейно сближаются. 7 ил.
Фиг. Z
ч/ Г
Si
ff
ft
:г-з:
4Г&
г
-г- (J)
,
ФигЛ
23
4,
fe.5
(Риг.
27
32
Составитель Л.Вишнякова Редактор А.Мотыль Техред Л.Сердюкова
Заказ 1461
Тираж 418
ВНИИПИ Государственного комитета по изобретениям и открытиям при ГКНТ СССР 113035, Москва, Ж-35, Раушская наб., д. 4/5
Производственно-издательский комбинат Патент, г, Ужгород, ул. Гагарина, 101
Фиг.1
Корректор О.Ципле
Подписное
| Захватно- срезающее устройство лесозаготовительной машины | 1976 |
|
SU563142A1 |
| Печь для непрерывного получения сернистого натрия | 1921 |
|
SU1A1 |
| Клещевой захват | 1974 |
|
SU500161A1 |
