Изобретение относится к медицине, точнее к протезированию и протезостроению, и может быть использовано в протезах верхних конечностей с тяговым управлением как рабочее приспособление.
Цель изобретения - регулирование силы схвата предметов.
На чертеже показано устройство, общий вид.
Захват содержит неподвижную и подвижную бранши 1,2с крючками 3, 4. Подвижная бранша 2 выполнена с упором 5 на конце и закреплена на оси б, установленной в корпусе 7, а неподвижная бранша 1 соединена с корпусом 7 с помощью стяжных гаек 8, 9. На неподвижной бранше 1 установлен пружинный механизм схвата, выполненный в виде барабана 10, в котором размещен набор пружин 11 из трех-семи штук с установленными в них толкателями 12, на барабане 10 выполнены продольные пазы 13 для фиксации положения упора 5 подвижной бранши 2. Продольные пазы 13 и упор 5 образуют фиксатор барабана 10. Барабан 10 установлен на кольце 14, зафиксированном на неподвижной бранше 1, которое совместно с ее прямолинейным цилиндрическим участком 15 является подшипником для барабана. На подвижной бранше 2 выполнен рычаг 16, к которому закреплена тяга 17. Для поворота бранш 1, 2 имеется ротационный узел 18, выполненный в виде сопрягаемых проточек 19 в корпусе 7 и в гильзе 20, в которой установлен весь захват. В проточках 19 установлено фрикционное кольцо 21 для обеспечения достаточного сопротивления вращению захвата.
Устройство работает следующим образом.
Индивидуально каждому больному в зависимости от потребности в силе схвата подбираются пружины 11 с определенной жесткостью, а значит и с определенной силой сжатия, которые устанавливаются вместе с толкателями 12 в барабан 10 в сжатом на 50% состоянии. Поворотом барабана 10 вокруг неподвижной бранши 1 устанавливают ячсйк барабана 10 с требуемой пружиной 11 1амп опр;иом, чтобы ее толкатель 12 был конными связан с упором 5 подвижной (ip.ii мм .. который устанавливается в про- ;u. паз 13 барабана 10, фиксируя выбранное рабочее положение. При этом сила разжатия пружины 11 воздействует через толкатель 12 и упор 5 на подвижную бран- шу 2, прижимая ее к неподвижной бранше 1. В зависимости от жесткости пружины 11 силу схвата между браншами 1, 2 можно регулировать в пределах 0,3-3 кг, что достаточно для удержания бытовых и некоторых рабочих приспособлений с различной силой схвата.
Для раскрытия захвата с помощью мышц плечевого пояса прикладывают усилие на
0
тягу 17, которая через рычаг 16 перемещает подвижную браншу 2 вокруг оси 6, отводя ее от неподвижной бранши 1 и сжимая при этом пружину 11, т. е. для раскрытия захвата
инвалиду необходимо преодолеть сопротивление пружины 11. Рычаг 16 с тягой 17 позволяют без значительных энергозатрат инвалида произвести раскрытие бранш 1, 2, подвести захват к предмету, предварительно выполнив ориентацию бранш 1,2с помощью
0 ротационного узла 18. При освобождении тяги 17 от усилия подвижная бранша 2 возвращается в исходное, т. е. закрытое состояние, так как пружина 11 распрямляясь, отжимает упор 5 и толкатель 12 и прижимает
ее к неподвижной бранше 1. Сила захвата при этом регулируется жесткостью пружины 11 и величиной ее сжатия в исходном состоянии.
Вывод пружин 11 из рабочей зоны захвата и размещение их в барабане ГО упрощает инвалиду управление таким протезом, потому что в зависимости от потребности возможно осуществить подбор требуемой силы сжатия в пределах 0,3-3 кг. Рычажная система раскрытия захвата снижает энерго5 траты инвалида. Регулирование силы захвата с помощью набора пружин 11 различной жесткости и величины их сжатия позволяет осуществлять индивидуальный выбор пружин 11 в зависимости от вида деятельности инвалида, в котором используется это
0 устройство. Переключение пружин 11 в рабочую зону осуществляется поворотом барабана вокруг его оси и не представляет особой трудности для инвалида с односторонней ампутацией, а фиксация обеспечивается размещением упора 5 подвижной бранши 2 в
5 продольном пазу 13 барабана 10, что обеспечивает надежность выбранного положения.
Таким образом, предлагаемое устройство за счет переключения набора -пружин 11 позволяет регулировать плавно силу захвата предметов в зависимости от вида деятельности инвалида. Это расширяет функциональные возможности захвата, так как позволяет в зависимости от выполняемой работы подключать требуемый силовой эле- 5 мент. Все это позволяет инвалиду выполнять большее количество трудовых и бытовых операций, т. е. повышает уровень социально- трудовой реабилитации инвалидов.
Формула изобретения
Захват искусственной верхней конечности, содержащий корпус, в котором закреплена неподвижная бранша и шарнирно установлена оснащенная рычагом, связанным с тягой, подвижная бранша с фиксатором, кинематически связанная с неподвижной браншей посредством пружинного механизма схвата, отличающийся тем, что, с целью регулирования силы схвата предметов, в нем
1570721
56
пружинный механизм схвата выполнен в ви-пружин разной жесткости с толкателями, де барабана, установленного на неподвиж-а на подвижной бранше выполнен упор, разной бранше с возможностью поворота и фик-мещенный в одном из продольных пазов сации, и оснащенного продольными пазамибарабана для контактного соединения с од- и набором установленных внутри барабана5 ним из толкателей.
| название | год | авторы | номер документа |
|---|---|---|---|
| Захват искусственной верхней конечности | 1990 |
|
SU1762917A1 |
| Захват к протезу верхней конечности | 1989 |
|
SU1761134A1 |
| Захватное устройство | 1990 |
|
SU1761135A1 |
| Универсальная насадка к рабочему протезу руки | 1989 |
|
SU1666105A1 |
| Протез предплечья | 1989 |
|
SU1732969A1 |
| Устройство для схвата к протезам верхних конечностей | 1977 |
|
SU689670A1 |
| Устройство для схвата к протезамВЕРХНиХ КОНЕчНОСТЕй | 1979 |
|
SU845824A1 |
| Искусственная кисть | 1986 |
|
SU1438766A1 |
| Искусственная кисть | 1982 |
|
SU1052228A1 |
| Протез кисти | 1981 |
|
SU986416A1 |
Изобретение относится к медицине, точнее к протезированию, и может быть также использовано в манипуляторах при работе с малогабаритными легкими предметами. Цель изобретения - регулирование силы схвата предметов. Захват содержит неподвижную 1 и подвижную 2 бранши, причем последняя оснащена рычагом 16 и упором 5, пружинный механизм схвата в виде барабана 10, установленного с возможностью поворота и фиксации на неподвижной бранше 1, с набором пружин 11 разной жесткости, в которых установлены толкатели 12, при этом рычаг 16 связан с тягой 17, а барабан 10 имеет продольные пазы 13, в одном из которых размещен упор 5, контактирующий с толкателем 12. 1 ил.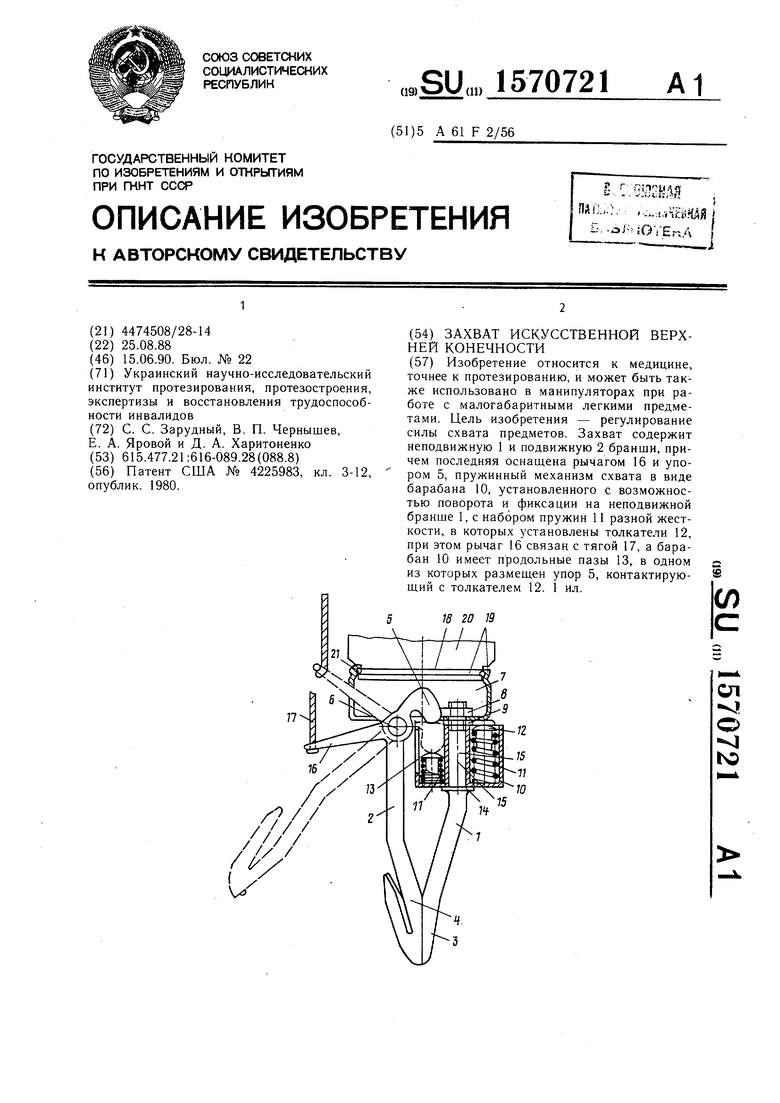
| Патент США № 4225983, кл | |||
| Переносная печь для варки пищи и отопления в окопах, походных помещениях и т.п. | 1921 |
|
SU3A1 |
| Способ получения фтористых солей | 1914 |
|
SU1980A1 |
